一种轮式里程计的标定方法、装置、智能车辆和存储介质与流程
本发明涉及轮式里程计内外参数标定,具体而言,涉及一种轮式里程计的标定方法、装置、智能车辆和存储介质。
背景技术:
1、随着移动机器人技术和无人驾驶技术的飞速发展,多传感器融合定位技术已经成为当下研究的热点,搭载轮式里程计的两轮差速模型的移动机器人可以根据航迹推算得到机器人的定位信息,与移动机器人搭载的其他传感器搭配使用,进行融合定位,可以获得更高精度的定位信息。
2、两轮差速模型的轮式里程计的轨迹推算可以通过速度和编码器推算,通过两个车轮的角速度推算车辆的线速度,因此需要知道两个车轮的半径可得到两个车轮分别的线速度,通过两个车轮的线速度和车轮之间的距离,可以推算车辆的姿态变化,因此使用速度推算轨迹的方法的内参是两个车轮的分别半径和两车轮的轴距;对于编码器推算轨迹的方法的内参是两个车轮的脉冲因子和两车轮的轴距。这两种推算方式,都需要通过标定获得准确的内参,提升轮式里程计的航迹推算的定位精度,所以需要对轮式里程计的内参进行准确标定。
3、轮式里程计是一个距离计算方法,对于车辆位姿的变化是通过两轮间的距离差大致推算的,所以仅使用轮式里程计推算出的定位数据并不准确,为了弥补轮式里程计无法准确推算位姿变化的缺点,一般工程上会使用imu数据和轮式里程计数据融合进行定位推算。因此,为了提升imu和轮式里程计融合推算的定位精度,需要计算轮速计到imu的x、y差值和它们之间的偏航角yaw,即需要对轮速计和imu的外参进行准确标定;除此之外,通过不准确的内参数据标定轮式里程计的外参,内参误差也会被传递给所计算的外参,会导致计算出的外参精度也较低,在外参不准确的情况下,想要通过标定的方法获得准确的内参,也是不可靠的;且内外参分别标定,需要采集不同数据,全套标定操作流程繁琐,不利于自动驾驶系统的量产标定方法。
4、由此可见,相关技术中存在的问题是:相关技术中的技术方案无法获取轮式里程计的内外参的准确值。
技术实现思路
1、本发明解决的问题是:相关技术中的技术方案无法获取轮式里程计的内外参的准确值。
2、为解决上述问题,本发明的第一目的在于提供一种轮式里程计内外参数的标定方法。
3、本发明的第二目的在于提供一种轮式里程计内外参数的标定装置。
4、本发明的第三目的在于提供一种智能车辆。
5、本发明的第四目的在于提供一种可读存储介质。
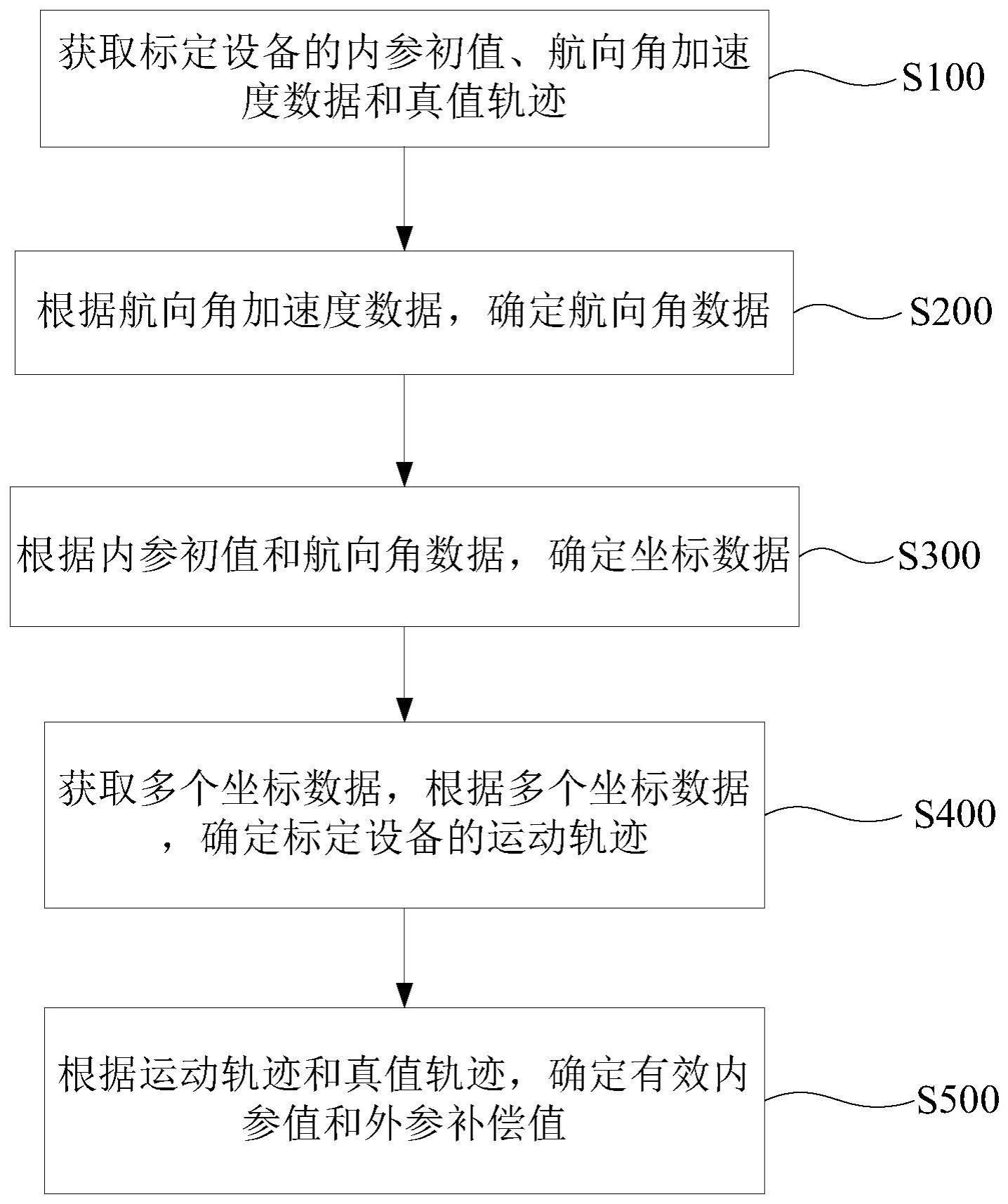
6、为实现本发明的第一目的,本发明的实施例提供了一种轮式里程计内外参数的标定方法,标定方法包括:
7、获取标定设备的内参初值、航向角加速度数据和真值轨迹;
8、根据航向角加速度数据,确定航向角数据;
9、根据内参初值和航向角数据,确定坐标数据;
10、获取多个坐标数据,根据多个坐标数据,确定标定设备的运动轨迹;
11、根据运动轨迹和真值轨迹,确定有效内参值和外参补偿值。
12、与现有技术相比,采用该技术方案所达到的技术效果:在本实施例的方案中,将轮式里程计的内外参数同时标定,减少了分开标定导致的其中一方如果标定不准确,则另一方亦难以获得准确值的问题;本实施例的方案提出的联合标定方法,能够准确地获取轮式里程计的内外参的准确值,为自动驾驶系统的量产标定提供了一种简便可行的标定方法;本实施例的方案为自动驾驶系统出厂后,自主在线标定提供了一种可行方法,用户可以根据车辆情况或是自动驾驶系统检测到车辆变化,而自主进行轮速里程计在线标定。
13、在本发明的一个实施例中,根据航向角加速度数据,确定航向角数据,包括:
14、θt=θt-1+αt×δt;
15、其中,θt表示t时刻的航向角;θt-1表示t-1时刻的航向角;αt表示t时刻的航向角加速度;δt表示t时刻与t-1时刻的间隔时长。
16、与现有技术相比,采用该技术方案所达到的技术效果:本实施例的方案能够准确地计算得到某一时刻的航向角数据,进而有效地提升了标定方法的准确性和可靠性。
17、在本发明的一个实施例中,内参初值包括标定设备的速度数据,根据内参初值和航向角数据,确定坐标数据,包括:
18、
19、
20、其中,v表示速度数据;表示标定设备在t时刻世界坐标系下的x坐标;表示标定设备在t-1时刻世界坐标系下的x坐标;表示标定设备在t时刻世界坐标系下的y坐标;表示标定设备在t-1时刻世界坐标系下的y坐标。
21、与现有技术相比,采用该技术方案所达到的技术效果:通过本实施例的方案能够准确地根据速度数据和航向角数据计算得到坐标数据,提升本发明的标定方法的可靠性。
22、在本发明的一个实施例中,内参初值包括标定设备的脉冲数据,根据内参初值和航向角数据,确定坐标数据,包括:
23、
24、
25、其中,δd表示脉冲数据。
26、与现有技术相比,采用该技术方案所达到的技术效果:通过本实施例的方案能够准确地根据脉冲数据和航向角数据计算得到坐标数据,提升本发明的标定方法的可靠性。
27、在本发明的一个实施例中,根据运动轨迹和真值轨迹,确定有效内参值和外参补偿值,包括:
28、将运动轨迹和真值轨迹进行最小二乘,调整内参值和外参值,检测运动轨迹和真值轨迹的位置误差;
29、当位置误差小于预设阈值时,确定此时的内参值为有效内参值,此时的外参值为外参补偿值。
30、与现有技术相比,采用该技术方案所达到的技术效果:通过本实施例的方案能够准确地确定有效内参值和外参补偿值,进而提升了本发明的标定方法的准确性。
31、在本发明的一个实施例中,在根据运动轨迹和真值轨迹,确定有效内参值和外参补偿值之后,还包括:
32、重复标定方法的步骤,确定多组有效内参值和外参补偿值,将多组有效内参值的平均值确定为准确内参值,将多组外参补偿值的平均值确定为准确外参补偿值。
33、与现有技术相比,采用该技术方案所达到的技术效果:本实施例的方案进一步地提升了本发明的标定方法的可靠性。
34、在本发明的一个实施例中,在重复标定方法的步骤,确定多组有效内参值和外参补偿值,将多组有效内参值的平均值确定为准确内参值,将多组外参补偿值的平均值确定为准确外参补偿值之后,还包括:
35、将准确内参值作为下次标定的内参初值,将准确外参补偿值作为下次标定的外参补偿值初值。
36、与现有技术相比,采用该技术方案所达到的技术效果:本实施例的方案提升了后续标定的准确性和便捷性。
37、为实现本发明的第二目的,本发明的实施例提供了一种轮式里程计内外参数的标定装置,标定装置包括:检测模块,检测模块用于获取标定设备的内参初值、航向角加速度数据和真值轨迹;第一计算模块,第一计算模块用于根据航向角加速度数据,确定航向角数据;第二计算模块,第二计算模块用于根据内参初值和航向角数据,确定坐标数据;第三计算模块,第三计算模块用于获取多个坐标数据,根据多个坐标数据,确定标定设备的运动轨迹;第四计算模块,第四计算模块用于根据运动轨迹和真值轨迹,确定有效内参值和外参补偿值。
38、本发明实施例的智能车辆的控制装置实现如本发明任一实施例的智能车辆的标定方法的步骤,因而具有如本发明任一实施例的智能车辆的标定方法的全部有益效果,在此不再赘述。
39、为实现本发明的第三目的,本发明的实施例提供了一种智能车辆,其包括:处理器,存储器及存储在存储器上并可在处理器上运行的程序或指令,程序或指令被处理器执行时实现如本发明任一实施例的标定方法的步骤。
40、本发明实施例的智能车辆实现如本发明任一实施例的标定方法的步骤,因而具有如本发明任一实施例的标定方法的全部有益效果,在此不再赘述。
41、为实现本发明的第四目的,本发明的实施例提供了一种可读存储介质,可读存储介质上存储程序或指令,程序或指令被处理器执行时实现如本发明任一实施例的标定方法的步骤。
42、本发明实施例的可读存储介质实现如本发明任一实施例的标定方法的步骤,因而具有如本发明任一实施例的标定方法的全部有益效果,在此不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!