一种基于深度学习的压缩波前探测方法
本发明涉及一种基于深度学习的压缩波前校正方法,属于自适应光学领域。
背景技术:
1、在使用地基望远镜进行天文观测时,由于大气湍流的干扰会把动态误差引入到光学系统里,导致成像质量降低。为了补偿大气湍流扰动产生的波前畸变,用自适应光学系统进行校正是一种非常有效的手段[lifa hu,li xuan,yongjun liu,zhaoliang cao,dayuli,and quanquan mu,phase-only liquid-crystal spatial light modulator forwave-front correction with high precision,opt.express,12,6403-6409(2004)],即实时测量和实时校正来克服动态干扰,提高图像的分辨率。
2、波前探测器是自适应光学系统的重要组成部分之一,最常用的是夏克哈特曼波前探测器(shack-hartmann wavefront sensor,shwfs),它的结构主要包括微透镜阵列和相机,它通过测量光点的质心计算波前的斜率来重构大气湍流波前。由于大气湍流的影响,用于地基光学望远镜的自适应光学系统时,夏克哈特曼波前探测器探测得到的一帧光点图像中,各个光点的光强有起伏,部分光点信噪比很差,用于波前重构时甚至会导致误差的增加;同时,大气湍流的波前测量要求shwfs的空间分辨率高、测量速度快。但微透镜数不能太多,以免探测暗弱目标的能力降低,一方面,微透镜阵列中微透镜的数量越多,波前分割的越细,测量的精度越高;但另一方面,微透镜数量越多时,相同入射光的能量下,每个微透镜的能量会越少,探测暗弱目标的能力相应也会降低,且信噪比降低导致测量误差增大。传统的夏克哈特曼波前探测方法已经无法解决这一矛盾,人们尝试将压缩感知技术引入波前探测领域。
3、压缩感知也被称为压缩采样或稀疏采样,用于获取和重构稀疏或可压缩的信号。这个方法利用信号稀疏的特性,相较于奈奎斯特理论,能够从较少的测量值还原出原来整个欲得知的信号。2014年,james polans等人首先将压缩感知技术用于波前测量,所提的sparzer算法采用zernike多项式对斜率进行稀疏化[polans j,mcnabb r p,izatt j a,etal.compressed wavefront sensing[j].optics letters,2014,39(5):1189-1192.],其优势在于需要的微透镜数量更少,有利于提高波前探测速度也不会降低探测暗弱目标的能力。gregory a.howland等人提出了一种针对暗弱信号测量的压缩感知单像素相机的波前传感器,在高分辨率空间光调制器上施加随机的二进制图案。用这种压缩波前探测技术恢复波前,从10000个投影中获得高质量的256×256像素波前[howland g a,lμm d j,howellj c.compressive wavefront sensing with weak values[j].optics express,2014,22(16):18870];2018年,eddy chow mun tik将压缩波前探测用于测量自由曲面轮廓[eddymun tik chow,ningqun guo,edwin chong,and xin wang,surface measurement usingcompressed wavefront sensing,photonic sensors,2019,9(2):02115]。2022年,ke等人利用压缩波前探测进行波前校正实验[ke x,wu j,hao j,distorted wavefrontreconstruction based on compressed sensing[j].applied physics b,2022,128:107.]。在前面文献中,所用的经典稀疏化和重构方法在小的压缩比时,会明显增加波前重构误差。因此,目标波前主要是低阶的波前,其中高阶畸变所占比重比较少。近年来,人们在将深度学习用于波前重构方面进行了大量研究,利用深度学习直接从光点重构出波前,实际上已经不是压缩波前探测了,但直接从光点重构波前,严重依赖于硬件,且计算时间通常高达几十毫秒,目前还不能用于外场的大气湍流校正。
4、而且在前述已报道的稀疏斜率重构方法中,具有较小值的斜率通常被忽略为零,这明显增加了小压缩比时的波前重构误差,因此,他们主要用低阶zernike模式组成的简单波前进行重构和验证,而无法测量大气湍流引起的复杂波前畸变。由于大气湍流引起的像差非常复杂,导致斜率分布范围广,小的斜率值也可能对复杂波前的高频成分有贡献,直接视为零会导致波前中部分高频信息丢失。而如果斜率恢复的精度低,会导致波前重构的精度相应地低,因此,已有的压缩波前探测算法很难应用于地基大口径光学望远镜的自适应光学系统中。
5、在本技术所提出的深度神经网络中,输入和输出数据是斜率,而不是具有大网格数的光斑和波前图像,并且即使对于具有30×30微透镜的shwfs,斜率的数据个数也不大于1800。因此,我们设计的深度神经网络,可以在其快速恢复速度和高波前重构精度之间取得平衡,通过高精度地恢复斜率,提高压缩波前探测算法中波前重构精度。
技术实现思路
1、为了解决目前上述问题,本发明提供了一种基于深度学习的压缩波前校正方法,总体过程如下,在利用shwfs进行波前探测的过程中,首先,得到的是稀疏的光点阵,并由此计算波前斜率;其次,对测得的具有稀疏性的波前斜率用深度神经网络进行恢复,恢复完整的斜率数据;最后,利用恢复的斜率进行波前重构。所提出的深度神经网络以稀疏斜率作为输入,输出的斜率接近原始斜率。
2、一种基于深度学习的压缩波前校正方法,所述方法包括:
3、步骤1,构建基于深度神经网络的压缩波前传感网络dnncws;
4、步骤2,模拟产生光点阵图像和对应的波前zernike系数作为训练数据,以便对所构建的基于深度神经网络的压缩波前传感网络dnncws进行训练;
5、步骤3,获取待重构波前对应的光点阵图像,并利用训练好的基于深度神经网络的压缩波前传感网络dnncws进行斜率恢复;
6、步骤4,根据恢复出的斜率重构波前。
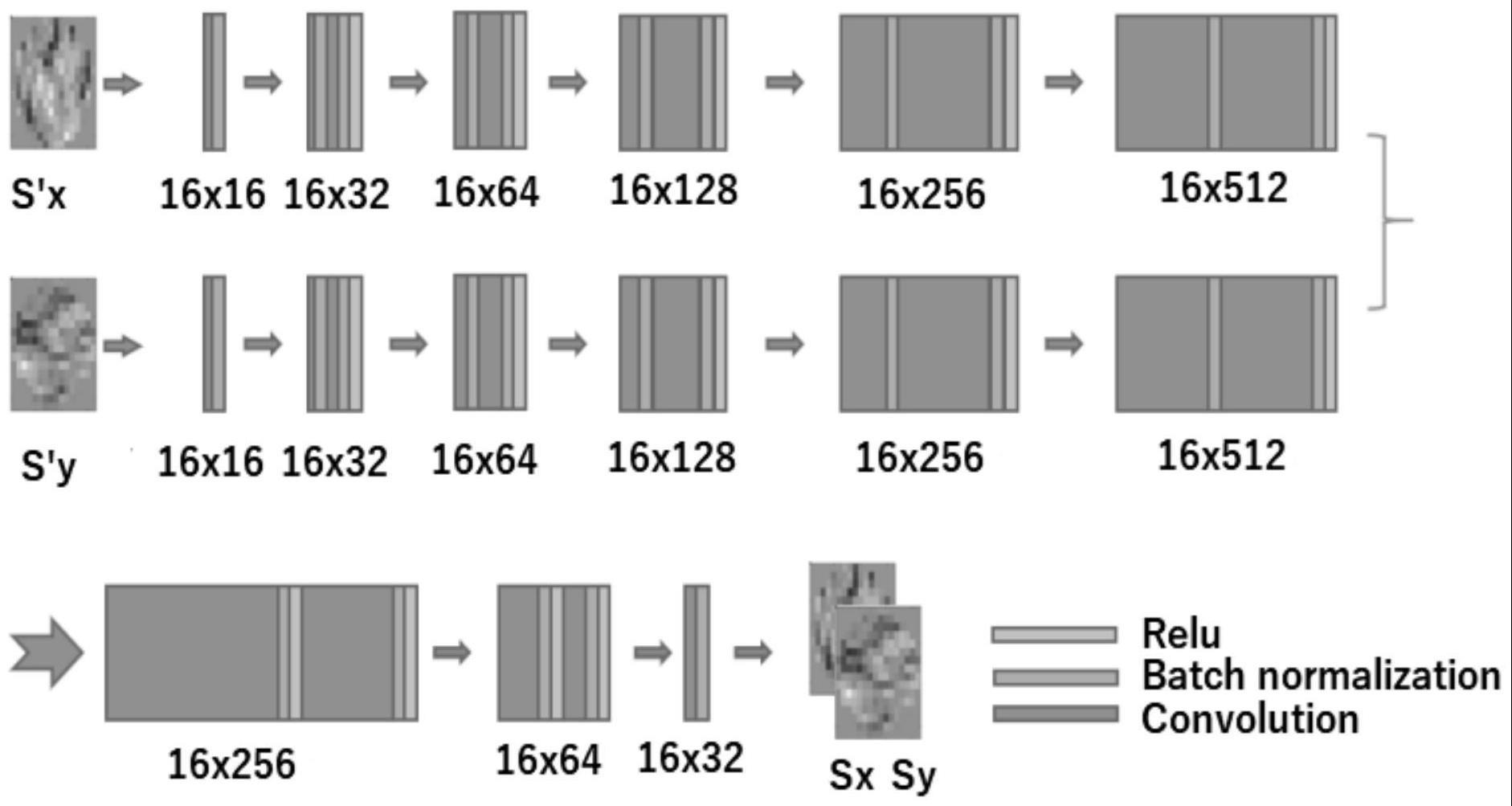
7、可选的,所述基于深度神经网络的压缩波前传感网络dnncws为9层神经网络结构,包括:
8、第一层为conv1层,卷积核大小为3×3,步长为1,padding是1,并且使用batchnormalization进行归一化;
9、第二层到第六层为basicblock层,即resnet中使用到的残差模块,第二层到第六层的每一层包括两个conv层,卷积核大小为3×3,步长为1,padding为1,将relu函数作为激活函数并进行归一化;
10、第七第八层为doubleconv层,每一层由两个conv层构成,卷积核大小为3×3,步长为1,padding是1,使用batch normalization进行归一化并将relu函数作为激活函数;
11、第九层为outconv层,卷积核大小为1×1,不包含batch normalization与激活函数relu。
12、可选的,所述步骤2还包括:
13、根据所述光点阵图像计算斜率,并对斜率进行稀疏化以模拟光点的稀疏采集过程,将所述光点阵图像、稀疏化的斜率和对应的波前zernike系数作为训练数据。
14、可选的,所述方法在利用训练数据对所构建的基于深度神经网络的压缩波前传感网络dnncws进行训练时,对多组斜率的训练与测试,得到最优的网络模型。
15、可选的,所述步骤2中对斜率进行稀疏化,包括:
16、对斜率信号sx和sy进行稀疏化处理:
17、sx=ψθx,sy=ψθy, (5)
18、式中θx∈rm×n,θy∈rm×n为sx、sy的稀疏表示,即稀疏化矩阵,使用离散余弦变换dct矩阵作为稀疏化矩阵,矩阵的非零元素数目远远小于n2,n表示斜率数组θx和θy的元素数目;
19、设计大小为m×n的观测矩阵φ,对sx和sy进行观测,得到对应的斜率观测值sx′和sy′。
20、可选的,所述观测矩阵为高斯矩阵。
21、可选的,所述步骤4采用模式法或区域法重构出最终测量的波前。
22、本技术还提供上述方法在天文观测领域中的应用。
23、本发明有益效果是:
24、本技术所提出的深度神经网络以深度残差网络(resnet)为基础,用合理的网络结构在不增加计算时间的情况下,得到高精度的重构结果,解决传统的压缩探测中高频成分丢失的问题;且本技术所提出的深度神经网络中,输入和输出数据是斜率,而不是具有大网格数的光斑和波前图像,并且即使对于具有30×30微透镜的shwfs,斜率的数据个数也不大于1800。因此,本技术设计的深度神经网络,可以在其快速恢复速度和高波前重构精度之间取得平衡,通过高精度地恢复斜率,提高压缩波前探测算法中波前重构精度。
- 还没有人留言评论。精彩留言会获得点赞!