一种混合环境中的定位方法、装置、设备和介质
本技术涉及目标定位的,尤其是涉及一种混合环境中的定位方法、装置、设备和介质。
背景技术:
1、在位置感知应用程序中高精度的无线定位是必不可少的,例如,在目标跟踪、导航、灾害管理、救援和智能交通中高精度的定位技术均是异常重要的。针对定位方法而言,早期的目标定位方法主要研究在视距(line of sight,los)环境下的情况,这类方法只考虑了目标节点与锚节点之间是直线通信,没有任何阻碍物。然而,在室内、地下或在其他恶劣环境中,目标节点与锚节点之间的通信往往会受到很多阻碍物的遮挡,即,目标节点与锚节点之间的信号传播路径为非视距(non line of sight,nlos)路径,进而,造成锚节点测得的信号传播距离大于目标节点与锚节点之间的真实距离,形成nlos误差,即,在存在nlos的环境下定位精度较低。
2、为了提高在nlos环境下定位精度,相关技术给出了多种解决方法,在一种情况中,在混合环境中,仅提取los传输路径的测量数据进行定位计算,确定目标节点在混合环境中的位置,其中,混合环境为目标节点与锚节点之间同时存在los和nlos的传播情况,然而,仅提取los传输路径的测量数据极具挑战性,漏检会导致显著的性能损失。在另一种情况中,基于nlos误差的先验信息进行目标节点的定位计算,确定目标节点在混合环境中的位置,其中,先验信息包括:概率分布、上界约束和稀疏性,然而,这种定位方法的精度与先验信息的准确度息息相关,一旦nlos误差的先验信息偏差较大,导致这类定位方法的改进效果不佳,甚至降低了定位精度。
3、因而,如何提供一种在混合环境中高精度的定位方法是本领域技术人员亟待解决的问题。
技术实现思路
1、本技术的目的是提供一种混合环境中的定位方法、装置、设备和介质,用于解决以上至少一项技术问题。
2、本技术的上述发明目的是通过以下技术方案得以实现的:
3、第一方面,本技术提供一种混合环境中的定位方法,采用如下的技术方案:
4、一种混合环境中的定位方法,包括:
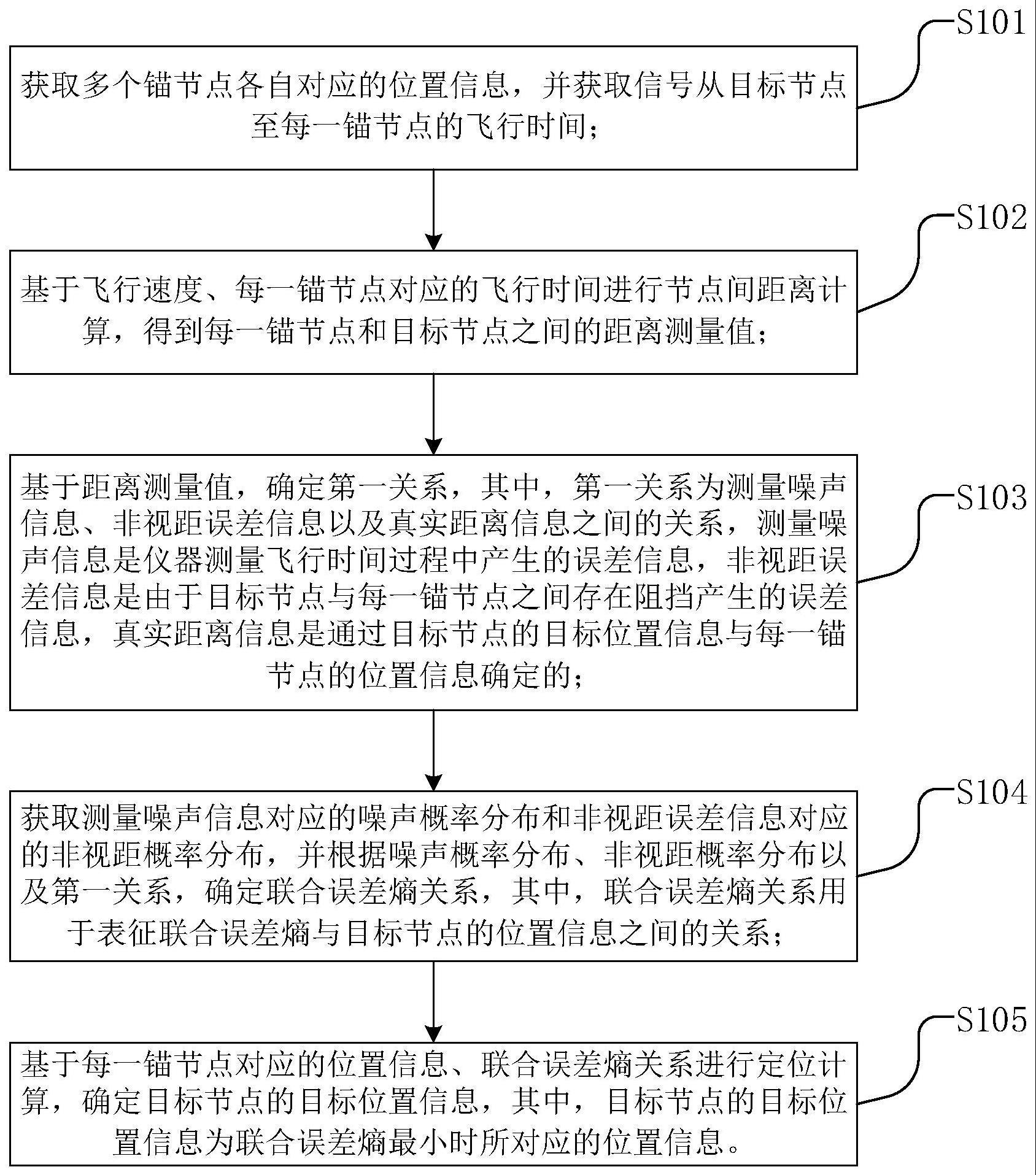
5、获取多个锚节点各自对应的位置信息,并获取信号从目标节点至每一锚节点的飞行时间;
6、基于飞行速度、每一锚节点对应的所述飞行时间进行节点间距离计算,得到每一所述锚节点和所述目标节点之间的距离测量值;
7、基于所述距离测量值,确定第一关系,其中,所述第一关系为测量噪声信息、非视距误差信息以及真实距离信息之间的关系,所述测量噪声信息是仪器测量飞行时间过程中产生的误差信息,所述非视距误差信息是由于目标节点与每一锚节点之间存在阻挡产生的误差信息,所述真实距离信息是通过所述目标节点的目标位置信息与每一所述锚节点的位置信息确定的;获取所述测量噪声信息对应的噪声概率分布和所述非视距误差信息对应的非视距概率分布,并根据所述噪声概率分布、所述非视距概率分布以及所述第一关系,确定联合误差熵关系,其中,所述联合误差熵关系用于表征联合误差熵与目标节点的位置信息之间的关系;
8、基于每一所述锚节点对应的位置信息、所述联合误差熵关系进行定位计算,确定所述目标节点的目标位置信息,其中,所述目标节点的目标位置信息为所述联合误差熵最小时所对应的位置信息。
9、通过采用上述技术方案,基于飞行速度、每一锚节点对应的飞行时间进行节点间距离计算,得到每一锚节点和目标节点之间的距离测量值;然后,基于距离测量值,确定测量噪声信息、非视距误差信息以及真实距离信息之间的第一关系;进而,基于噪声概率分布、非视距概率分布以及第一关系,确定联合误差熵关系;最终,基于每一锚节点对应的位置信息、联合误差熵关系进行定位计算,确定联合误差熵最小时所对应的位置信息作为目标节点的目标位置信息。本技术实施例的定位方法中综合考虑了混合环境中的非视距误差和测量噪声,并基于最小联合误差熵准则进行定位计算,提高了定位方法在混合环境中的定位精度。
10、本技术在一较佳示例中可以进一步配置为:所述根据所述噪声概率分布、所述非视距概率分布以及所述第一关系,确定联合误差熵关系,包括:
11、根据所述噪声概率分布和所述非视距概率分布,确定联合概率分布;
12、基于所述联合概率分布,以及联合误差熵与概率分布的关系,确定第二关系,其中,所述第二关系为非视距误差熵、噪声误差熵与所述联合误差熵之间的关系;
13、基于所述第一关系和所述第二关系,确定所述联合误差熵关系。
14、本技术在一较佳示例中可以进一步配置为:所述联合误差熵与概率分布的关系为:j(n,e)=-log∫∫p2(n,e)dnde,其中,p(n,e)为联合概率分布、j(n,e)为联合误差熵;
15、所述第二关系为:j(n,e)=j(n)+j(e),j(n)为噪声误差熵,j(e)为非视距误差熵。
16、本技术在一较佳示例中可以进一步配置为:所述基于所述第一关系和所述第二关系,确定所述联合误差熵关系之前,还包括:
17、获取多个虚拟锚节点对应的平衡参数,其中,所述虚拟锚节点表征均值为0,方差为噪声方差最小值的虚拟节点;
18、基于所述平衡参数对所述非视距误差熵进行调整,得到调整后的非视距误差熵;
19、基于所述调整后的非视距误差熵,确定调整后的第二关系,所述调整后的第二关系为所述调整后的非视距误差熵、所述噪声误差熵与所述联合误差熵之间的关系;
20、相应的,所述基于所述第一关系和所述第二关系,确定所述联合误差熵关系,包括:
21、基于所述第一关系和所述调整后的第二关系,确定所述联合误差熵关系。
22、本技术在一较佳示例中可以进一步配置为:所述基于所述平衡参数对所述非视距误差熵进行调整,得到调整后的非视距误差熵,包括:
23、基于所述平衡参数按照下述公式对所述非视距误差熵进行调整,得到调整后的非视距误差熵,其中,公式为:
24、jλ(e)为调整后的非视距误差熵,λ为平衡参数、n为锚节点个数、ei为目标节点和第i个锚节点之间的非视距误差、ej为目标节点和第j个锚节点之间的非视距误差、σe为非视距方差、g为高斯核函数。
25、本技术在一较佳示例中可以进一步配置为:所述基于每一所述位置信息、所述联合误差熵关系进行定位计算,确定所述目标节点的目标位置信息,包括:
26、针对所述联合误差熵关系进行非指数松弛变换,得到第一松弛联合误差熵关系;
27、基于所述第一松弛联合误差熵关系进行半正定松弛,得到第二松弛联合误差熵关系;
28、基于每一所述位置信息、所述第二松弛联合误差熵关系进行定位计算,确定所述目标节点的目标位置信息。
29、本技术在一较佳示例中可以进一步配置为:所述基于每一所述位置信息、所述第二松弛联合误差熵关系进行定位计算,确定所述目标节点的目标位置信息,包括:
30、获取预设约束条件;
31、基于所述预设约束关系、每一所述位置信息、所述第二松弛联合误差熵关系进行定位计算,确定所述目标节点的目标位置信息;
32、所述预设约束条件包括:
33、g≥0,g为预设辅助向量;
34、a[xtz]t≤f,a为预设系数矩阵、x为待求解的坐标、z定义为xtx、f为预设条件矩阵;
35、h为预设辅助矩阵,并定义为gtg;
36、i2×2为维度为2的单位矩阵;
37、hii为h矩阵中第i行第i列的元素、si为第i个锚节点的位置信息;
38、hij为h矩阵中第i行第j列的元素、sj为第j个锚节点的位置信息;
39、hn+i,n+i为h矩阵中第n+i行第n+i列的元素、hi,n+i为g矩阵中第i行第n+i列的元素、ri为第i个锚节点和目标节点之间的距离测量值、σi为测量噪声方差。
40、第二方面,本技术提供一种混合环境中的定位装置,采用如下的技术方案:
41、一种混合环境中的定位装置,包括:
42、获取模块,用于获取多个锚节点各自对应的位置信息,并获取信号从目标节点至每一锚节点的飞行时间;
43、距离计算模块,用于基于飞行速度、每一锚节点对应的所述飞行时间进行节点间距离计算,得到每一所述锚节点和所述目标节点之间的距离测量值;
44、关系确定模块,用于基于所述距离测量值,确定第一关系,其中,所述第一关系为测量噪声信息、非视距误差信息以及真实距离信息之间的关系,所述测量噪声信息是仪器测量飞行时间过程中产生的误差信息,所述非视距误差信息是由于目标节点与每一锚节点之间存在阻挡产生的误差信息,所述真实距离信息是通过所述目标节点的目标位置信息与每一所述锚节点的位置信息确定的;
45、联合误差熵关系确定模块,用于获取所述测量噪声信息对应的噪声概率分布和所述非视距误差信息对应的非视距概率分布,并根据所述噪声概率分布、所述非视距概率分布以及所述第一关系,确定联合误差熵关系,其中,所述联合误差熵关系用于表征联合误差熵与目标节点的位置信息之间的关系;
46、定位计算模块,用于基于每一所述锚节点对应的位置信息、所述联合误差熵关系进行定位计算,确定所述目标节点的目标位置信息,其中,所述目标节点的目标位置信息为所述联合误差熵最小时所对应的位置信息。
47、第三方面,本技术提供一种电子设备,采用如下的技术方案:
48、至少一个处理器;
49、存储器;
50、至少一个应用程序,其中至少一个应用程序被存储在存储器中并被配置为由至少一个处理器执行,所述至少一个应用程序配置用于:执行上述的混合环境中的定位方法。
51、第四方面,本技术提供一种计算机可读存储介质,采用如下的技术方案:
52、一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序在计算机中执行时,令所述计算机执行上所述的混合环境中的定位方法。
53、综上所述,本技术包括以下至少一种有益技术效果:
54、1.基于飞行速度、每一锚节点对应的飞行时间进行节点间距离计算,得到每一锚节点和目标节点之间的距离测量值;然后,基于距离测量值,确定测量噪声信息、非视距误差信息以及真实距离信息之间的第一关系;进而,基于噪声概率分布、非视距概率分布以及第一关系,确定联合误差熵关系;最终,基于每一锚节点对应的位置信息、联合误差熵关系进行定位计算,确定联合误差熵最小时所对应的位置信息作为目标节点的目标位置信息。本技术实施例的定位方法中综合考虑了混合环境中的非视距误差和测量噪声,并基于最小联合误差熵准则进行定位计算,提高了定位方法在混合环境中的定位精度。
55、2.基于多个虚拟锚节点对应的平衡参数对非视距误差熵进行调整,得到调整后的非视距误差熵,并基于调整后的非视距误差熵,确定调整后的第二关系,相应的,基于第一关系和调整后的第二关系,确定联合误差熵关系。本技术实施例通过在非视距误差上附加基准零点,即,引入虚拟锚节点来生成额外的测量数据,使得非视距熵对非视距误差均值的敏感性将得到改善。
- 还没有人留言评论。精彩留言会获得点赞!