一种稳健的卫星导航快时变闪烁干扰对消方法、装置与流程
本技术涉及抗干扰,特别地,涉及一种稳健的卫星导航快时变闪烁干扰对消方法、装置。
背景技术:
1、阵列干扰滤除是干扰环境下实现稳健卫星导航的常用技术。基于干扰来向与卫星信号来向不同的特点,阵列干扰滤除通过对不同阵元接收信号进行加权,在干扰来向方向形成零陷,完成干扰滤除,实现强干扰环境下的稳健卫星导航。为在干扰来向方向准确形成零陷,传统阵列干扰滤除技术或者需要使用大量天线阵列数据计算阵列协方差矩阵,通过矩阵求逆的开环方式获得抗干扰加权值,或者需要使用大量天线阵列数据通过迭代更新的闭环方式获得抗干扰加权值。这两种方式都需要干扰信号满足时间平稳特性。
2、快时变闪烁干扰正是针对传统阵列干扰滤除技术的这一特点,在短时间内来向快速变化,使得天线阵列数据在长时间内表现出干扰来向个数增加,超过矩阵求逆等开环方式能够对抗的干扰来向个数上限,或破坏迭代更新等闭环方式的正确迭代方向,最终导致传统阵列干扰滤除技术难以滤除干扰信号的目的。
3、详细描述快时变闪烁干扰对抗传统阵列干扰滤除技术原理如下:快时变闪烁通常表现为干扰来向切换速度快,切换时间通常远短于1ms,切换周期及切换方向长时间为随机。由于切换时间很短,两次切换之间的采样点数据难以支持完成开环迭代或闭环协方差矩阵计算。同时由于切换周期及切换方向长时间为随机,难以通过增加开环迭代时长或闭环计算协方差矩阵的采样点个数实现干扰滤除。因此,快时变闪烁干扰将导致传统阵列干扰滤除技术性能急剧恶化甚至无法正常工作的问题。
4、常用的解决方法通常是通过预判干扰闪烁时间和方向,在干扰来向方向预先固定形成零陷,完成干扰滤除。此类算法性能非常依赖干扰闪烁时间和方向的估计精度,尤其对干扰来向估计精度要求严苛。随着干扰来向估计误差的增加,干扰滤除效果急剧恶化。
5、为应对这一问题,提高装备在复杂电子对抗环境中的稳健性,亟需一种能够有效对抗快时变闪烁干扰的方法。
技术实现思路
1、针对上述技术问题,本技术一方面提供了一种稳健的卫星导航快时变闪烁干扰对消方法,以解决现有技术无法稳健有效地对抗快时变闪烁干扰的技术问题。
2、本技术采用的技术方案如下:
3、一种稳健的卫星导航快时变闪烁干扰对消方法,基于采用阵列天线的卫星导航抗干扰处理器实现,所述阵列天线包括m个天线阵元,对应m个通信信道,其中m为正整数且m≥2,具体包括步骤:
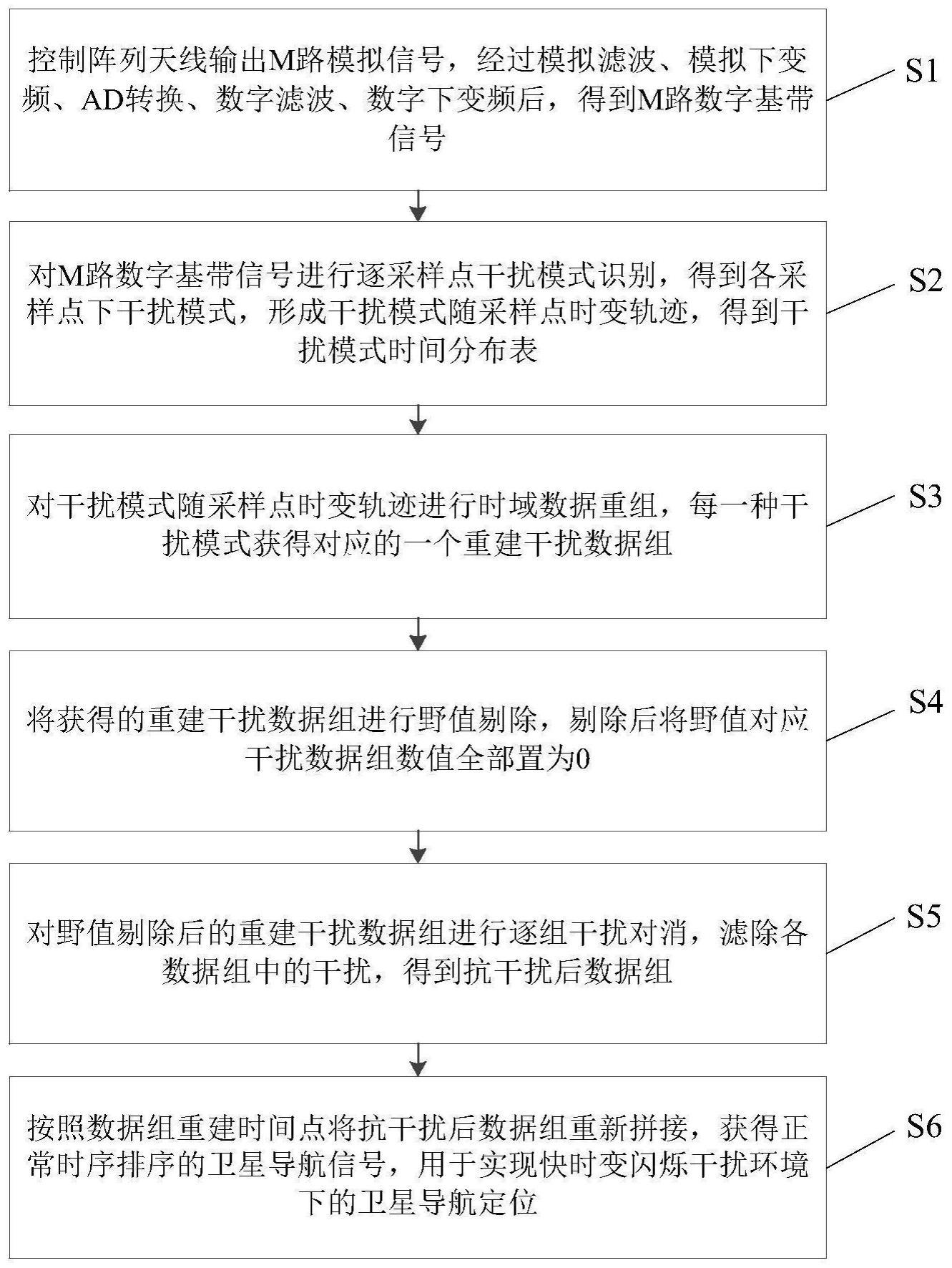
4、s1、控制阵列天线输出m路模拟信号,经过模拟滤波、模拟下变频、ad转换、数字滤波、数字下变频后,得到m路数字基带信号;
5、s2、对m路数字基带信号进行逐采样点干扰模式识别,得到各采样点下干扰模式,形成干扰模式随采样点时变轨迹;
6、s3、对干扰模式随采样点时变轨迹进行时域数据重组,每一种干扰模式获得对应的一个重建干扰数据组;
7、s4、将获得的重建干扰数据组进行野值剔除,剔除后将野值对应干扰数据组数值全部置为0;
8、s5、对野值剔除后的重建干扰数据组进行逐组干扰对消,滤除各数据组中的干扰,得到抗干扰后数据组;
9、s6、按照数据组重建时间点将抗干扰后数据组重新拼接,获得正常时序排序的卫星导航信号,用于实现快时变闪烁干扰环境下的卫星导航定位。
10、进一步地,所述步骤s2具体包括步骤:
11、s21、采用x-y-z坐标系,任意选择阵列天线中的一个阵元作为参考阵元,获得其他第i个阵元相对参考阵元的三维坐标为:xi,yi,zi,其中i为正整数,且m-1≥i≥1;
12、s22、依据相对三维坐标,得到不同来向干扰信号到达天线各阵元的相对相位关系:
13、
14、式中,称为干扰来向对应1×m维导向矢量,θ为俯仰角,为方位角;
15、s23、以方向角0°、俯仰角0°为初始值,1°为角度变化间隔,遍历方向角0°~359°、俯仰角0°~90°的所有组合,获得32760×m维干扰来向导向矢量字典b;
16、s24、对m路数字基带信号逐采样点提取1×m维阵列信号c,使用凸优化工具求解最优化问题的局部最优解1×32760维矢量y:
17、
18、上式中,1×32760维矢量y表征对应阵列信号c在空间来向中的分布特征,用于确定对应采样点的干扰模式;
19、s25、对各采样点计算得到的矢量y按采样时间排列,获得共t个采样点的干扰模式时间分布表y=[y1,…,yt,…,yt],其中t>>102400,t≥t≥1。
20、进一步地,具体凸优化工具求解过程为迭代求解:
21、x(n+1)=x(n)+b(x(n)b-c)+(x(n)-y(n))
22、y(n+1)=(y(n)-x(n+1))+sign(x(n+1))
23、上式中,n为迭代次数,初始值为0;x(n)为中间运算变量,初始值为1×32760维全零矢量;y(n)初始值为1×32760维全零矢量;sign()为取符号函数;
24、凸优化工具迭代求解的迭代结束条件为迭代差异低于3倍噪声能量:
25、
26、或者,凸优化工具迭代求解的迭代结束条件为:
27、n≥10
28、上式中,为环境热噪声能量,具体数值来源为无干扰环境时,统计ad采样数据1000点的平方和平均数。
29、进一步地,所述步骤s3具体包括步骤:
30、s31、计算相邻两个采样点干扰模式差异:当差异值超过100×m时,认为时刻t+1为干扰闪烁时刻,记为pt=t+1,pt至pt+1-1采样时刻区间内的所有采样点,包含pt和pt+1-1采样点,隶属于同一干扰模式,所有采样点组成的数据组定义为第t+1组稳态采样点数据组dt+1,第一组稳态采样点数据组d1为从首个采样点到p1-1个采样点的所有采样点数据组,第100×m为差异门限阈值;
31、s32、计算任意两个干扰闪烁时刻采样点的干扰模式差异:其中t≥m≠n≥1,当差异值不超过100×m时,认为对应的两组稳态采样点数据组隶属于同一干扰模式,并将采样点数据组按时序合并排序,实现一种干扰模式对应一个重建稳态采样点数据组。
32、进一步地,所述步骤s4具体包括步骤:
33、s41、计算各重建稳态数据组包含采样点数量;
34、s42、当采样点数量少于256×m点时,认为该重建稳态数据组为野值集合,将该重建稳态数据组对应采样时刻的抗干扰输出全部置为0。
35、进一步地,所述步骤s5具体包括步骤:
36、s51、对每个天线单元的每个重建干扰数据组按点进行数据分段,其中n为重建干扰数据组中的单个天线单元信号采样点数量,为向下取整操作,对重建干扰数据组在采样点未段补0,保证采样点数量和补0数量总和是的整数倍,记该整数值为s;
37、s52、对每个数据段分别进行点快速傅里叶变换,每一个频点获得一组s×m数值矩阵,记录为r;
38、s53、对每一个频点,进行干扰对消操作:e=r(rhr)-1f,其中f为m×1维全1列矢量,*h为共轭转置操作,*-1为矩阵求逆操作,e为干扰对消后s×1维列矢量;
39、s54、将e按对应频点排序,进行逆快速傅里叶变换,获得抗干扰后时域数据;
40、s55、将抗干扰后时域数据按照数据分段序号排序拼接,获得抗干扰后数据组。
41、进一步地,所述步骤s6具体包括步骤:
42、s61、按照干扰闪烁时刻将重建稳态数据组对应的抗干扰后数据组和野值对应的全置0数据组重新拼接,获得正常时序排序的干扰抑制后卫星导航信号;
43、s62、使用正常时序排序的干扰抑制后卫星导航信号进行正常卫星导航信号跟踪、捕获操作,实现快时变闪烁干扰环境下的卫星导航定位。
44、本技术另一方面还提供了一种稳健的卫星导航快时变闪烁干扰对消装置,基于采用阵列天线的卫星导航抗干扰处理器实现,所述阵列天线包括m个天线阵元,对应m个通信信道,其中m为正整数且m≥2,具体包括:
45、数字基带信号获取模块,用于控制阵列天线输出m路模拟信号,经过模拟滤波、模拟下变频、ad、数字滤波、数字下变频后,得到m路数字基带信号;
46、干扰模式识别模块,用于对m路数字基带信号进行逐采样点干扰模式识别,得到各采样点下干扰模式,形成干扰模式随采样点时变轨迹;
47、时域数据重组模块,用于对干扰模式随采样点时变轨迹进行时域数据重组,每一种干扰模式获得对应的一个重建干扰数据组;
48、野值剔除模块,用于将获得的重建干扰数据组进行野值剔除,剔除后将野值对应干扰数据组数值全部置为0;
49、干扰对消模块,用于对野值剔除后的重建干扰数据组进行逐组干扰对消,滤除各数据组中的干扰,得到抗干扰后数据组;
50、数据组拼接模块,用于按照数据组重建时间点将抗干扰后数据组重新拼接,获得正常时序排序的卫星导航信号,用于实现快时变闪烁干扰环境下的卫星导航定位。
51、本技术另一方面还提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现所述稳健的卫星导航快时变闪烁干扰对消方法的步骤。
52、本技术另一方面还提供了一种存储介质,所述存储介质包括存储的程序,在所述程序运行时控制所述存储介质所在的设备执行所述的稳健的卫星导航快时变闪烁干扰对消方法的步骤。
53、相比现有技术,本技术具有以下有益效果:
54、(1)、本技术提出的稳健的卫星导航快时变闪烁干扰对消方法,通过逐个采样点干扰模式识别,将快时变闪烁干扰重建为时间平稳干扰组,采用逐个时间平稳干扰组干扰对消,实现了快时变闪烁干扰有效滤除,依据干扰重建时间点将干扰滤除后信号重新拼接,可实现卫星导航正常定位。与传统阵列干扰滤除技术相比,有效解决了快时变闪烁干扰存在的复杂电子环境下,卫星导航稳健工作问题。
55、(2)、本技术提出的稳健的卫星导航快时变闪烁干扰对消方法,充分利用闪烁干扰在空间分布稀疏和野值在时间分布稀疏的特点,自适应实现了干扰模式提取和野值剔除。因此,本技术无需预知或估计快时变闪烁干扰的闪烁时间和闪烁方向。与固定零陷干扰滤除方法相比,本技术实现所需预置条件少,性能更加稳健,更适合应用于实际电子对抗场景中;
56、(3)、本技术提出的稳健的卫星导航快时变闪烁干扰对消方法充分利用单个采样点信息,从算法层面规避了快时变闪烁干扰时间非平稳特点引起的抗干扰收敛问题和超过抗干扰自由度问题;
57、(4)、本技术提出的稳健的卫星导航快时变闪烁干扰对消方法便于模块化封装,计算实时性好,工程实现简单,平台间可移植性能好。
58、除了上面所描述的目的、特征和优点之外,本技术还有其它的目的、特征和优点。下面将参照附图,对本技术作进一步详细的说明。
- 还没有人留言评论。精彩留言会获得点赞!