机器人的定位切换方法、装置、设备和介质与流程
本发明涉及机器人定位,尤其涉及一种机器人的定位切换方法、装置、设备和介质。
背景技术:
1、随着机器人定位技术的发展,人们对于机器人定位精度提出了更高的要求。目前常采用绝对定位方式(如slam或rtk gps)对机器人进行定位。
2、其中,slam定位依赖于预先构建的定位地图,但是在构建定位地图的过程中,不可避免会存在地图形变的问题。在进行机器人末端识别取货的过程中,由于地图形变会导致机器人运行过程中产生一定程度的绝对偏差,从而影响定位精度。
3、rtk gps定位在卫星信号较差或者存在遮挡的情况下,会出现明显的精度退化。此时,机器人感知到的障碍物在绝对坐标系下会出现跳动,可能导致异常避障,从而影响机器人的到位精度。
4、综合以上,对于一些精度要求较高的特殊场景,如机器人的窄道通行和末端取货等,现有的绝对定位无法达到精度要求。
技术实现思路
1、本发明提供了一种机器人的定位切换方法、装置、设备和介质,基于机器人的当前状态确定采用绝对定位方式或者相对定位方式,能够更好地满足实际应用场景中对机器人的不同定位精度要求,从而提高定位精度。
2、根据本发明的一方面,提供了一种机器人的定位切换方法,所述方法包括:
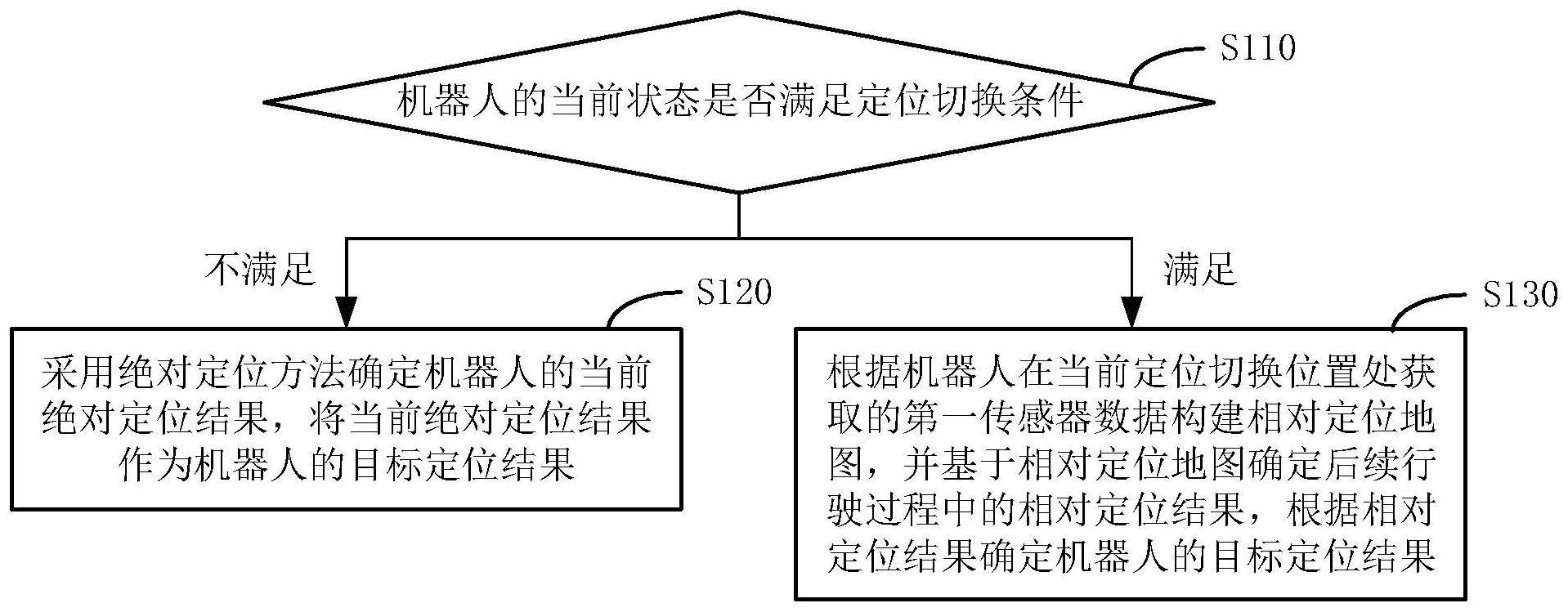
3、判断机器人的当前状态是否满足定位切换条件;
4、若不满足,则采用绝对定位方法确定机器人的当前绝对定位结果,将所述当前绝对定位结果作为所述机器人的目标定位结果;
5、若满足,则根据所述机器人在当前定位切换位置处获取的第一传感器数据构建相对定位地图,并基于所述相对定位地图确定后续行驶过程中的相对定位结果,根据所述相对定位结果确定所述机器人的目标定位结果。
6、根据本发明的另一方面,提供了一种机器人的定位切换装置,包括:
7、定位切换条件判断模块,用于判断机器人的当前状态是否满足定位切换条件;
8、绝对定位模块,用于若不满足,则采用绝对定位方法确定机器人的当前绝对定位结果,将所述当前绝对定位结果作为所述机器人的目标定位结果;
9、相对定位模块,用于若满足,则根据所述机器人在当前定位切换位置处获取的第一传感器数据构建相对定位地图,并基于所述相对定位地图确定后续行驶过程中的相对定位结果,根据所述相对定位结果确定所述机器人的目标定位结果。
10、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
11、至少一个处理器;以及
12、与所述至少一个处理器通信连接的存储器;其中,
13、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的机器人的定位切换方法。
14、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的机器人的定位切换方法。
15、本发明实施例的技术方案,判断机器人的当前状态是否满足定位切换条件;若不满足,则采用绝对定位方法确定机器人的当前绝对定位结果,将当前绝对定位结果作为机器人的目标定位结果;若满足,则根据机器人在当前定位切换位置处获取的第一传感器数据构建相对定位地图,并基于相对定位地图确定后续行驶过程中的相对定位结果,根据相对定位结果确定机器人的目标定位结果。本技术方案,基于机器人的当前状态确定采用绝对定位方式或者相对定位方式,能够更好地满足实际应用场景中对机器人的不同定位精度要求,从而提高定位精度。
16、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种机器人的定位切换方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,根据所述机器人在当前定位切换位置处获取的第一传感器数据构建相对定位地图,包括:
3.根据权利要求2所述的方法,其特征在于,在根据所述第一反光板点云数据构建相对定位地图之前,所述方法还包括:
4.根据权利要求3所述的方法,其特征在于,基于所述相对定位地图确定后续行驶过程中的相对定位结果,包括:
5.根据权利要求1所述的方法,其特征在于,在根据所述机器人在当前定位切换位置处获取的第一传感器数据构建相对定位地图之前,所述方法还包括:
6.根据权利要求1所述的方法,其特征在于,在基于所述相对定位地图确定后续行驶过程中的相对定位结果之前,所述方法还包括:
7.根据权利要求1-6任一项所述的方法,其特征在于,判断机器人的当前状态是否满足定位切换条件,包括:
8.一种机器人的定位切换装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的机器人的定位切换方法。
技术总结
本发明实施例公开了一种机器人的定位切换方法、装置、设备和介质。其中,该方法包括:判断机器人的当前状态是否满足定位切换条件;若不满足,则采用绝对定位方法确定机器人的当前绝对定位结果,将所述当前绝对定位结果作为所述机器人的目标定位结果;若满足,则根据所述机器人在当前定位切换位置处获取的第一传感器数据构建相对定位地图,并基于所述相对定位地图确定后续行驶过程中的相对定位结果,根据所述相对定位结果确定所述机器人的目标定位结果。本技术方案,基于机器人的当前状态确定采用绝对定位方式或者相对定位方式,能够更好地满足实际应用场景中对机器人的不同定位精度要求,从而提高定位精度。
技术研发人员:陈晨光,张硕,钱永强
受保护的技术使用者:上海木蚁机器人科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!