一种基于点云共轭匹配的机载激光雷达安置角自动检校方法
本发明属于激光雷达测量,尤其是涉及一种基于点云共轭匹配的机载激光雷达安置角自动检校方法。
背景技术:
1、机载激光雷达以覆盖范围广、探测效率高、测量精度高等优势成为近年来快速发展的新型测量技术。机载激光雷达系统中的全球定位系统(global positioning system,gps)、惯性测量单元(inertial measurement unit,imu)模块分别记录当前飞行的位置和飞机姿态信息,从而确定激光发射点到目标位置的空间向量,获取当前激光脚点坐标。点云的坐标精度取决于各模块的测量误差以及安装误差。为生成高精度的点云数据,需要尽可能的减小系统误差。由于imu和激光发射模块在集成过程中受制于安装工艺的约束,导致imu的本体坐标系与激光发射坐标系无法完全重合,存在微小方向角度偏差。该偏差通过直接测量方式较难获得准确值。但角度误差在机载雷达数据处理中影响较大,不可忽略。
2、如cn107621628a的中国专利文献公开了一种安置角误差检校方法,通过选取地形平坦、高大建筑物、平直公路作为安置角误差检校场,设计相互垂直的前后左右四个飞行航线进行扫描测量,根据获取得到的重叠点云进行手动校准。
3、如cn112859052a的中国专利文献公开了一种基于重叠航带共轭基元的机载激光雷达系统集成误差检校方法,通过建立数学模型,找到参考点云与模板点云之间的共轭基元,求解点云之间的最佳变换关系式,反解得到系统系统集成误差检校矩阵,完成系统安置角检校。
4、目前使用的安置角检校方法对检校场地要求严格,飞行航线设计复杂,需要人工参与校准流程,降低了机载激光雷达工作效率。因此亟需发展对检校场地要求低、飞行航线要求少的安置角自动检校方法,增强机载激光雷达工作效率,提高探测精度。
技术实现思路
1、针对现有机载激光雷达中安置角检校流程繁琐、检校场要求高、人工干预度高的问题,本发明提供了一种基于点云共轭匹配的机载激光雷达安置角自动检校方法,能够大幅提升安置角检校速度,提升机载激光雷达雷达探测精度。
2、一种基于点云共轭匹配的机载激光雷达安置角自动检校方法,包括:
3、(1)根据机载激光雷达类椭圆扫描方式建立传感器坐标系,计算原始点云;
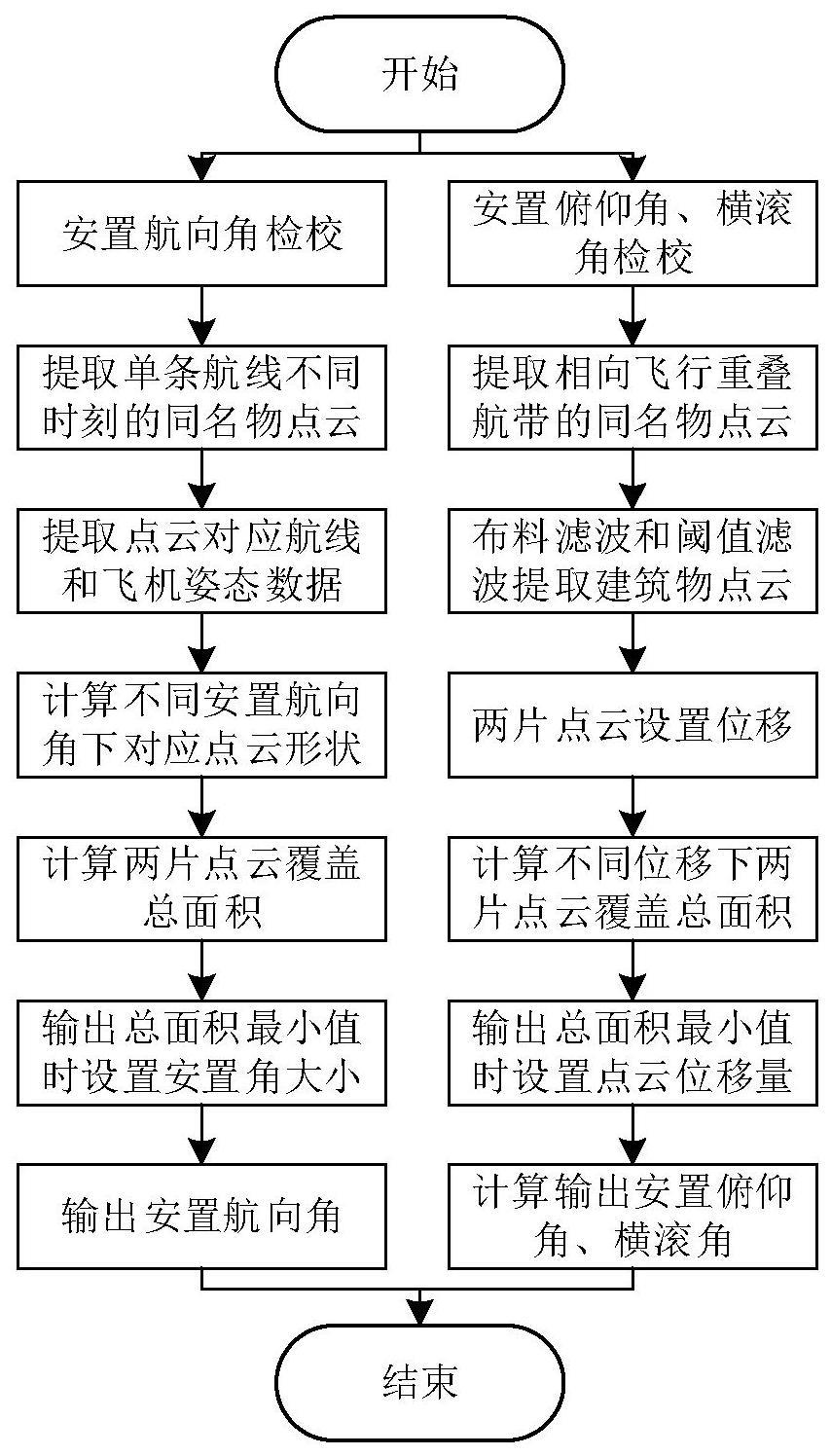
4、(2)进行航向角检校,挑选覆盖特征建筑物的单条航线,在原始点云中挑选出建筑物的共轭点云;
5、(3)对步骤(2)提取的共轭点云做布料滤波处理和阈值滤波处理,并筛选点云对应的飞机姿态数据;
6、(4)设定一组航向角偏差值,利用滤波处理后的共轭点云和对应的飞机姿态数据计算在不同航向角偏差值下的两个时刻的点云;
7、(5)根据机载激光雷达的点云密度设定格网分辨率,统计步骤(4)处理后的点云覆盖面积;
8、(6)根据步骤(5),计算不同航向偏差值下的前后两个时刻的点云覆盖面积;计算一组航向角偏差值中覆盖面积最小的航向偏差角,即当前处于扫描轨迹不同时刻的点云重合度最高,该航向偏差角即为安置航向角;
9、(7)进行横滚角和俯仰角检校,提取两条航线上特征建筑物的共轭点云;
10、(8)对步骤(7)提取的共轭点云进行布料滤波和阈值滤波处理,并筛选点云对应飞机姿态数据;
11、(9)设定一组位移偏差值,在步骤(8)处理后的点云上增加位移偏差值;
12、(10)根据机载激光雷达的点云密度设定格网分辨率,统计步骤(9)处理后的点云格网面积;
13、(11)根据步骤(10),计算不同位移偏差值下的点云覆盖面积,一组位移偏差值中覆盖面积最小的位移偏差,进一步计算安置俯仰角和横滚角。
14、进一步地,步骤(1)中,建立机载激光雷达扫描坐标系,根据类椭圆扫描方式建立传感器坐标系;以东北天坐标系为例,坐标原点为反射镜中心,x轴沿着激光出射光线方向,y轴沿着飞行方向,z轴垂直向上,出射光线的单位向量p表示为:
15、
16、其中,为出射光线方位角,ψ为出射光线天顶角;
17、飞机姿态角矩阵cb表示为:
18、
19、其中,pitch、roll、heading为飞机姿态数据中对应的俯仰角、横滚角和航向角数据;
20、出射光线单位向量表示为:
21、p=cb′×p′
22、其中,p′为飞机姿态角改变后的出射光线单位向量,p为传感器坐标系下的出射光线。
23、步骤(2)中,对于航向角检校点云的选择,挑选处于单条航带上,具有明显建筑物的区域。挑选位于类椭圆扫描轨迹前后两个时刻的点云,作为用于航向角检校的共轭点云。
24、步骤(3)中,布料滤波处理时,根据点云信息选择场景模型,根据点云密度设置格网大小,设置算法所需迭代次数,设置地面点与非地面点分类阈值;阈值滤波处理时,根据挑选建筑物点云实际高度,设定合适的高度阈值,提取大于设定阈值的所有点云数据;筛选点云对应的航向角、横滚角和俯仰角飞机姿态角度数据
25、步骤(4)中,将步骤(3)中提取飞机姿态数据带入姿态矩阵cb,得到安置角姿态矩阵cb′,并计算不同航向角偏差值对应的点云;其中,安置角姿态矩阵cb′表示为:
26、
27、其中,δp为安置俯仰角,δr为安置横滚角,δh为安置航向角;
28、出射光线单位向量表示为:
29、p=cb×cb′×p″
30、其中,p″为安置角检校后和飞机姿态角改变后的出射光线单位向量,p为传感器坐标系下的出射光线;δp和δr设置为0,δh设置为航向角偏差值,带入安置角姿态矩阵cb′。
31、步骤(5)中,点云覆盖面积的计算过程如下:
32、根据点云坐标范围设定格网数组区间,按照机载激光雷达的点云密度设定格网分辨率(如格网分辨率设置为1m′×1m),搜索每一块格网中是否存在点云数据,若存在则赋值为1,不存在则赋值为0;
33、考虑到机载激光雷达按照类椭圆轨迹进行扫描,点云不均匀,按照扫描轨迹到扫描中心的方向进行插值处理,补全中间缺失的点云数据;统计点云面积格网数组,计算点云覆盖面积。
34、步骤(7)中,挑选两条相向飞行且具有一定重叠度的航线,在航线上选取具有明显建筑物区域,提取两条航线中同一建筑物的共轭点云。
35、步骤(9)中,位移偏差值分为沿着飞机运动方向即y轴方向和垂直飞机运动方向即x轴方向的两组数据,在步骤(8)处理后的点云坐标中增加位移偏差值,获得新的一组点云坐标。
36、步骤(11)中,计算安置俯仰角δp的公式为:
37、
38、其中,δy为重叠航带的同名物点云沿航线方向的位移偏差,h为飞机飞行高度;
39、计算安置横滚角δr的公式为:
40、
41、其中,δx为重叠航带的同名物点云沿垂直于航线方向的位移偏差,h为飞机飞行高度。
42、与现有技术相比,本发明具有以下有益效果:
43、1、本发明基于点云共轭匹配方法,通过提取不同航线或不同时刻的同名物建筑物共轭点云,布料滤波和阈值滤波筛选,使用点云面积统计法计算重叠点云的重合度,最终计算安置航向角、横滚角和俯仰角。可实现自动化完成机载激光雷达系统安置角校正,无需过多人工干预。
44、2、本发明使用检校航线对建筑物选取无特定要求,无需多条垂直平行航线,有效降低了现有方法对检校场地需求,减轻检校航线设计任务。
- 还没有人留言评论。精彩留言会获得点赞!