基于仓库巡逻机器人的检测方法、检测系统及电子设备
本发明涉及机器人巡逻,更具体地,涉及一种基于仓库巡逻机器人的检测方法、检测系统及电子设备。
背景技术:
1、自主移动机器人要求机器人能实现自主寻径行走能力,实现这一能力前提是机器人知道自己所在位置。因此,自主移动机器人的定位技术是近年来研究热点技术之一。
2、目前广泛应用在自主移动机器人的定位方式包括基于激光点云定位方式及gps定位方式等。巡逻机器人工作场景复杂,包括园区场景、公园场景、广场场景、道路场景,物流仓库场景等。物流仓库存在货物多变,货柜扫图时候可能有货,下次定位的时候可能货物被搬走。同时物流仓库存在单一,货物堆满可能退化成长走廊模型。因此,针对仓库的场景的激光定位,不能与园区场景(场景内一般假定不变)采用同种策略。另外gps信号在仓库必然被遮挡,依靠gps定位不可行。
技术实现思路
1、本发明的一个目的是提供一种基于仓库巡逻机器人的检测方法、检测系统及电子设备的新技术方案,至少能够解决现有技术中场景多变不能检测且检测精度低等问题。
2、本发明的第一方面,提供了一种基于仓库巡逻机器人的检测方法,包括:
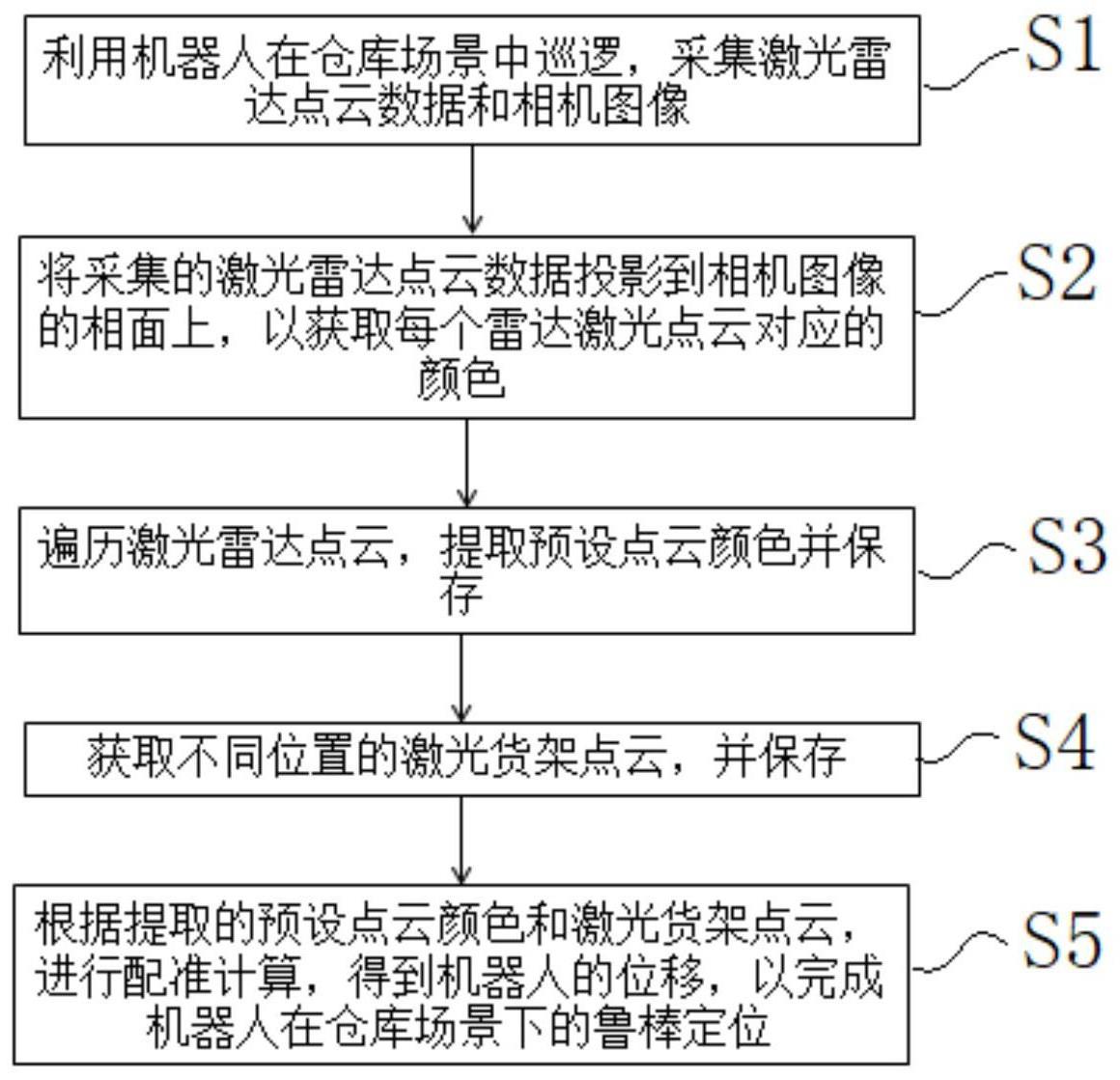
3、利用机器人在仓库场景中巡逻,采集激光雷达点云数据和相机图像;
4、将采集的所述激光雷达点云数据投影到所述相机图像的相面上,以获取每个所述雷达激光点云对应的颜色;
5、遍历所述激光雷达点云,提取预设点云颜色并保存;
6、获取不同位置的激光货架点云,并保存;
7、根据提取的所述预设点云颜色和所述激光货架点云,进行配准计算,得到所述机器人的位移,以完成所述机器人在所述仓库场景下的鲁棒定位。
8、可选地,利用机器人在仓库场景中巡逻的步骤包括:
9、设定所述机器人巡逻路线;
10、控制所述机器人按照所述巡逻路线进行巡逻。
11、可选地,所述机器人设有激光雷达和相机,所述激光雷达用于采集激光雷达点云数据和激光货架点云,所述相机用于获取相机图像。
12、可选地,采集激光雷达点云数据和相机图像的步骤还包括:
13、设定以激光雷达光源为坐标系原点,建立三维坐标系。
14、可选地,采集激光雷达点云数据和相机图像的步骤还包括:
15、进行相机内参的标定;
16、进行激光雷达与相机的联合标定。
17、可选地,设定货架颜色为红蓝,提取的所述预设点云颜色为红蓝。
18、可选地,采用点云配准算法进行配准计算。
19、本发明的第二方面,提供一种基于仓库巡逻机器人的检测系统,应用于上述实施例中所述的基于仓库巡逻机器人的检测方法,所述检测系统包括:
20、采集模块,所述采集模块用于利用机器人在仓库场景中巡逻,采集激光雷达点云数据和相机图像;
21、投影模块,所述投影模块用于将采集的所述激光雷达点云数据投影到所述相机图像的相面上,以获取每个所述雷达激光点云对应的颜色;
22、遍历模块,所述遍历模块用于遍历所述激光雷达点云,以提取预设点云颜色并保存;
23、获取模块,所述获取模块用于获取不同位置的激光货架点云,并保存;
24、计算模块,所述计算模块用于根据提取的所述预设点云颜色和所述激光货架点云,进行配准计算,得到所述机器人的位移,以完成所述机器人在所述仓库场景下的鲁棒定位。
25、本发明的第三方面,提供一种电子设备,包括:处理器和存储器,在所述存储器中存储有计算机程序指令,其中,在所述计算机程序指令被所述处理器运行时,使得所述处理器执行上述实施例中所述的基于仓库巡逻机器人的检测方法的步骤。
26、本发明的第四方面,提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器运行时,使得所述处理器执行上述实施例中所述的基于仓库巡逻机器人的检测方法的步骤。
27、本发明的基于仓库巡逻机器人的检测方法,利用机器人巡逻的方式,提高检测效率,降低人工成本。通过采集激光雷达点云数据和相机图像,获取每个所述雷达激光点云对应的颜色。同时通过获取不同位置的激光货架点云,进行配准计算,能够得到所述机器人的位移,完成所述机器人在仓库场景下的鲁棒定位。该基于仓库巡逻机器人的检测方法,能够适应复杂的仓库场景,检测精度高,适合大面积推广应用。
28、通过以下参照附图对本发明的示例性实施例的详细描述,本发明的其它特征及其优点将会变得清楚。
技术特征:
1.一种基于仓库巡逻机器人的检测方法,其特征在于,包括:
2.根据权利要求1所述的基于仓库巡逻机器人的检测方法,其特征在于,利用机器人在仓库场景中巡逻的步骤包括:
3.根据权利要求1所述的基于仓库巡逻机器人的检测方法,其特征在于,所述机器人设有激光雷达和相机,所述激光雷达用于采集激光雷达点云数据和激光货架点云,所述相机用于获取相机图像。
4.根据权利要求1所述的基于仓库巡逻机器人的检测方法,其特征在于,采集激光雷达点云数据和相机图像的步骤还包括:
5.根据权利要求1所述的基于仓库巡逻机器人的检测方法,其特征在于,采集激光雷达点云数据和相机图像的步骤还包括:
6.根据权利要求1所述的基于仓库巡逻机器人的检测方法,其特征在于,设定货架颜色为红蓝,提取的所述预设点云颜色为红蓝。
7.根据权利要求1所述的基于仓库巡逻机器人的检测方法,其特征在于,采用点云配准算法进行配准计算。
8.一种基于仓库巡逻机器人的检测系统,应用于权利要求1-7中任一项所述的基于仓库巡逻机器人的检测方法,所述检测系统包括:
9.一种电子设备,其特征在于,包括:处理器和存储器,在所述存储器中存储有计算机程序指令,其中,在所述计算机程序指令被所述处理器运行时,使得所述处理器执行权利要求1-7中任一项所述的基于仓库巡逻机器人的检测方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器运行时,使得所述处理器执行权利要求1-7中任一项所述的基于仓库巡逻机器人的检测方法的步骤。
技术总结
本发明公开了一种基于仓库巡逻机器人的检测方法、检测系统及电子设备,检测方法包括:利用机器人在仓库场景中巡逻,采集激光雷达点云数据和相机图像;将采集的所述激光雷达点云数据投影到所述相机图像的相面上,以获取每个所述雷达激光点云对应的颜色;遍历所述激光雷达点云,提取预设点云颜色并保存;获取不同位置的激光货架点云,并保存;根据提取的所述预设点云颜色和所述激光货架点云,进行配准计算,得到所述机器人的位移,以完成所述机器人在所述仓库场景下的鲁棒定位。本发明的基于仓库巡逻机器人的检测方法,能够适应复杂的仓库场景,检测精度高,适合大面积推广应用。
技术研发人员:刘彪,苏晓杰,袁国斌,王恒华,沈创芸
受保护的技术使用者:重庆大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!