一种多线激光雷达及其驱动方法与流程
本发明实施例涉及激光雷达技术,尤其涉及一种多线激光雷达及其驱动方法。
背景技术:
1、多线激光雷达是激光雷达的一种,是通过多个激光器发射激光来探测目标的位置、速度等特征量,其工作原理是先向目标发射探测激光光束,然后接收从目标物体反射回来的信号并与发射信号进行比较,就可以获得目标的有关信息。
2、在自动驾驶领域中,激光雷达由于应用广泛成为人们的关注热点。对于多线激光雷达,线数越高探测精度就越高,但线束的数量会受到体积限制。具体地,现有的多线激光雷达,当需要增加线数时,一般都是增加发射板上的激光发射器的数量或者增加发射板的数量,这样产品的体积不好控制;同时激光发射器数量增加,激光发射器的摆放会变得密集,这样会增加发射板的设计难度,激光发射器的角度调试难度也会相应增加;并且,包括透镜在内的光学结构的口径也需要相应地扩大,从而增大了整个激光雷达的体积。
技术实现思路
1、本发明提供一种多线激光雷达及其驱动方法,以保证多线激光雷达具备较小的体积,同时降低多线激光雷达中激光发射器和激光探测器的角度调试难度。
2、第一方面,本发明实施例提供了一种多线激光雷达,包括至少一个旋转台和位于所述旋转台上的至少一组激光收发单元,所述激光收发单元包括:
3、两个阵列激光发射器,每个所述阵列激光发射器包括阵列排布的多个激光发射器;
4、一个阵列激光探测器,所述阵列激光探测器包括阵列排布的多个激光探测器;
5、光学出射结构,位于多个所述激光发射器的出射光路上,多个所述激光发射器出射的多个激光光束经所述光学出射结构照射到外界;
6、光学接收结构,位于多个所述激光探测器的接收光路上,每个所述阵列激光发射器中的多个所述激光发射器出射的多个激光光束,经外界反射后形成多个反射光束,多个所述反射光束经所述光学接收结构一一对应入射至多个所述激光探测器中。
7、可选地,每组所述激光收发单元中,所述激光探测器的数量与每个所述阵列激光发射器中的所述激光发射器的数量相等,或者,所述激光探测器的数量等于两个所述阵列激光发射器中的所述激光发射器的数量的和。
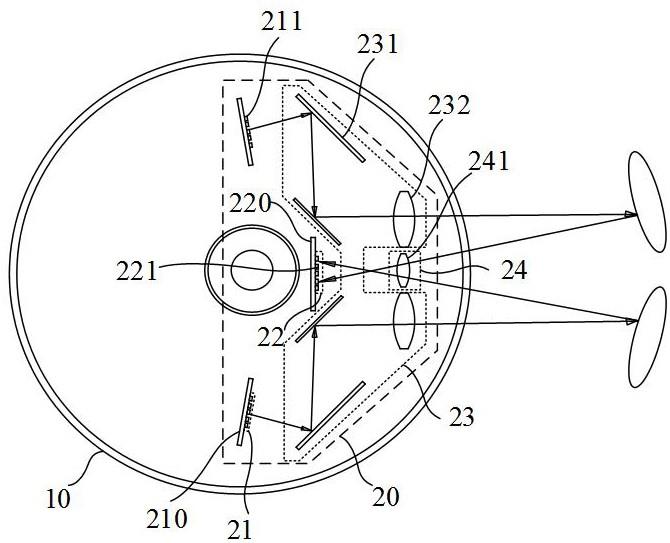
8、可选地,包括一个所述旋转台和位于所述旋转台上的一组所述激光收发单元;
9、每个所述阵列激光发射器还包括一个发射板,阵列排布的多个所述激光发射器设置于所述发射板上;所述阵列激光探测器还包括一个接收板,阵列排布的多个所述激光探测器设置于所述接收板上;
10、所述光学出射结构包括两个发射反射镜组和两个发射准直透镜组,每个所述阵列激光发射器的多个所述激光发射器出射的激光光束通过一个所述发射反射镜组和一个发射准直透镜组照射到外界;
11、光学接收结构包括一个接收准直透镜组,每个所述阵列激光发射器中的多个所述激光发射器出射的多个激光光束,经外界反射后形成多个反射光束,多个所述反射光束经所述接收准直透镜组一一对应入射至多个所述激光探测器中。
12、可选地,包括一个所述旋转台和位于所述旋转台上的两组所述激光收发单元;
13、两组所述激光收发单元的激光发射方向相互背离。
14、可选地,所述阵列激光发射器还包括发射板,阵列排布的多个所述激光发射器设置于所述发射板上;所述阵列激光探测器还包括接收板,阵列排布的多个所述激光探测器设置于所述接收板上。
15、可选地,每个所述阵列激光发射器包括一个所述发射板,两组所述激光收发单元中的四个所述发射板相互平行设置,且同一组所述激光收发单元中的两个所述阵列激光发射器,分别位于两个所述发射板背离另一组所述激光收发单元中的所述发射板的一侧;
16、所述阵列激光探测器包括一个所述接收板,两组所述激光收发单元中的两个所述接收板,位于所述旋转台的旋转轴相互背离的两侧。
17、可选地,还包括两个所述发射板,每个所述阵列激光发射器与另一组所述激光收发单元中的一个所述阵列激光发射器共用一个所述发射板,且共用一个所述发射板的两个所述阵列激光发射器分别设置于所述发射板相互背离的两侧表面;
18、每个所述阵列激光探测器包括一个所述接收板,两组所述激光收发单元中的两个所述接收板位于所述旋转台的旋转轴相互背离的两侧。
19、可选地,同一所述激光收发单元中的多个所述激光发射器分布在垂直所述旋转台的方向上,且在垂直所述旋转台的方向上,不同所述激光收发单元中的多个所述激光发射器一一交替错位或者按组交替错位;
20、同一所述激光收发单元中的多个所述激光探测器分布在垂直于所述旋转台的方向上,且在垂直所述旋转台的方向上,不同所述激光收发单元中的多个所述激光探测器一一交替错位或者按组交替错位。
21、第二方面,本发明实施例还提供了一种多线激光雷达的驱动方法,用于驱动如第一方面任一项所述的多线激光雷达,该驱动方法包括:
22、驱动每组激光收发单元中的两个阵列激光发射器,使每个所述阵列激光发射器中阵列排布的多个激光发射器通过光学出射结构发射激光光束;
23、通过对应所述激光收发单元中的光学接收结构,接收所述激光光束经外界反射后形成的多个反射光束,并将多个所述反射光束一一对应入射至阵列激光探测器中的多个激光探测器中。
24、可选地,每组所述激光收发单元中,所述激光探测器的数量与每个所述阵列激光发射器中的所述激光发射器的数量相等;
25、所述驱动每组激光收发单元中的两个阵列激光发射器,使每个所述阵列激光发射器中阵列排布的多个激光发射器通过光学出射结构发射激光光束,包括:
26、驱动每组所述激光收发单元中的两个所述阵列激光发射器,使每个所述阵列激光发射器中阵列排布的多个所述激光发射器依次通过所述光学出射结构依次发射所述激光光束;
27、所述通过对应所述激光收发单元中的光学接收结构,接收所述激光光束经外界反射后形成的多个反射光束,并将多个所述反射光束一一对应入射至阵列激光探测器中的多个激光探测器中,包括:
28、通过对应所述激光收发单元中的光学接收结构,依次接收所述激光光束经外界反射后形成的多个所述反射光束,并将多个所述反射光束一一对应入射至所述阵列激光探测器中的多个所述激光探测器中。
29、本发明实施例提供的多线激光雷达及其驱动方法,通过设置至少一个旋转台,并且在旋转台上设置至少一组激光收发单元,其中,每组激光收发单元均设置有两个阵列激光发射器、一个阵列激光探测器、光学出射结构和光学接收结构,利用两个阵列激光发射器和阵列激光探测器进行激光光束的收发,实现了对环境的探测。同时,由于两个阵列激光发射器均设置有多个激光发射器,故而每组激光收发单元均可以实现多线激光探测,通过两个阵列激光发射器以及多组激光收发单元的组合,可以增加多线激光雷达的探测精度;进一步由于每组激光收发单元中的激光发射器的设置密度可相对较小,从而降低了激光发射器的角度调试难度。本发明实施例提供的多线激光雷达可以在增加激光线数即改善激光探测精度的同时,保证多线激光雷达具备较小的体积,降低多线激光雷达中激光发射器和激光探测器的角度调试难度。
- 还没有人留言评论。精彩留言会获得点赞!