新型用于智能家居机器人的室内定位方法与流程
本发明涉及智能家居、工业智能控制,具体涉及一种新型用于智能家居机器人的室内定位方法。
背景技术:
1、智能家居机器人的精准定位是人机得以顺畅交互的关键。随着技术进步,越来越多的研发人员将定位硬件的开发作为重点。例如,中国专利公开号为cn113570663a公开一种基于单线激光雷达和顶视摄像头融合的室内定位方法,其利用顶视摄像头进行室内信息的扫描,并结合单线激光雷达进行机器人当前定位信息的匹配处理,利用定位硬件来提高定位精度。而智能家居普及过程中,价格因素是本领域技术人员越来越关注的因素。如何降低家居机器人的硬件投入,又能满足一定的定位、计算量和实时性要求,是未来研发方向。
技术实现思路
1、本发明要解决的技术问题是:克服现有技术的不足,提供一种新型用于智能家居机器人的室内定位方法,将房间顶部天花板作为采集对象,将天花板上的特征信息作为提取对象,减少计算量;利用带有红外的相机进行扫描和定位双重功能,减少硬件投入的同时,满足定位和实时性要求。
2、本发明的技术方案为:
3、一种新型用于智能家居机器人的室内定位方法,包括如下步骤:
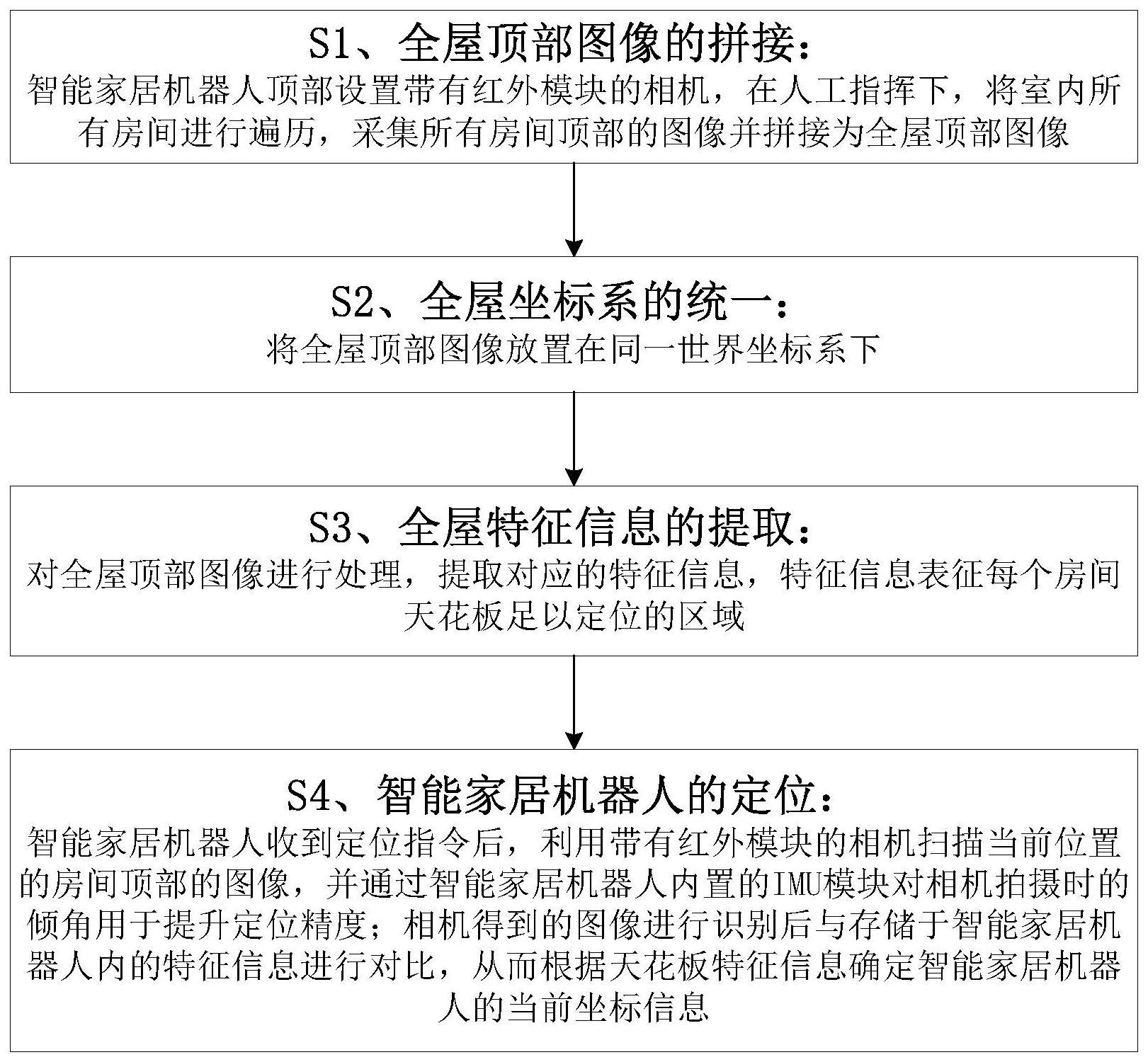
4、s1、全屋顶部图像的拼接:智能家居机器人顶部设置带有红外模块的相机,在人工指挥下,将室内所有房间进行遍历,采集所有房间顶部的图像并拼接为全屋顶部图像;
5、s2、全屋坐标系的统一:将全屋顶部图像放置在同一世界坐标系下;
6、s3、全屋特征信息的提取:对全屋顶部图像进行处理,提取对应的特征信息,特征信息表征每个房间天花板足以定位的区域;
7、s4、智能家居机器人的定位:智能家居机器人收到定位指令后,利用带有红外模块的相机扫描当前位置的房间顶部的图像;相机得到的图像进行识别后与存储于智能家居机器人内的特征信息进行对比,从而根据天花板特征信息确定智能家居机器人的当前坐标信息。
8、优选地,所述智能家居机器人设置有如下部件:
9、图像采集部件,包括相机和红外模块,利用红外模块降低光线明暗变化对相机拍摄图像的影响;
10、特征存储部件,包括存储器,存储器存储有全屋的特征信息和坐标信息,存储器的存储量级与房间天花板上特征的多少有关;
11、智能处理部件,包括处理器,扫描时用于接收所有房间的图像按照顺序进行拼接形成全屋顶部图像,定位时用于接收图像采集部件的图像、识别图像的特征信息、匹配特征存储部件的特征信息、得到当前坐标信息;
12、通信传输部件,包括通信模块,通信模块用于接收定位指令并发送当前坐标信息。
13、优选地,所述步骤s1中,房间顶部指的是天花板,天花板上的特征信息包括顶灯、吊灯、烟雾报警器、排气扇;特征信息具有位置相对固定、不易发生空间变化的特点。
14、优选地,所述步骤s1中,相机垂直安装于智能家居机器人的顶部,相机朝上拍摄天花板;在人工指挥下,相机遍历一遍即可获取全屋顶部图像。
15、优选地,所述步骤s2中,世界坐标系的原点为自定义,选定房间天花板的一个特征信息为世界坐标系的原点,指挥智能家居机器人在房间内按照顺序以一定速度采集房间顶部的图像,并记录相机的偏移量;将原点与相机的偏移量进行转换,得到全屋坐标系。
16、优选地,所述步骤s3中,全屋特征信息的提取,提取特征信息的轮廓,得到房间顶部的图像的特征坐标信息。
17、优选地,所述步骤s4中,智能家居机器人的当前坐标信息是特征信息所在坐标的地面投影。
18、优选地,本发明还包括如下步骤:
19、s5、智能家居机器人的交互:智能家居机器人响应定位指令,根据全屋坐标系和路径规划实现自主导航,通过自主导航达到设定目标点。
20、本发明与现有技术相比,具有以下有益效果:
21、通过拼接方式将全屋的房间顶部的图像进行拼接,智能家居机器人可以实现全屋坐标系的统一;
22、通过将位置相对固定、不易发生空间变化的间顶部天花板作为采集对象,巧妙地实现了机器人的室内定位问题;
23、通过将天花板上的特征信息作为提取对象,大大降低处理和识别的计算量;
24、利用带有红外的相机进行扫描和定位双重功能,减少硬件投入的同时,满足定位精度和实时性要求。
技术特征:
1.一种新型用于智能家居机器人的室内定位方法,其特征在于,包括如下步骤:
2.如权利要求1所述的新型用于智能家居机器人的室内定位方法,其特征在于,所述智能家居机器人(1)设置有如下部件:
3.如权利要求1所述的新型用于智能家居机器人的室内定位方法,其特征在于,所述步骤s1中,房间顶部指的是天花板,天花板上的特征信息包括顶灯(2)、吊灯(3)、烟雾报警器(5)、排气扇(4);特征信息具有位置相对固定、不易发生空间变化的特点。
4.如权利要求1所述的新型用于智能家居机器人的室内定位方法,其特征在于,所述步骤s1中,相机(11)垂直安装于智能家居机器人(1)的顶部,相机(11)朝上拍摄天花板°;在人工指挥下,相机(11)遍历一遍即可获取全屋顶部图像。
5.如权利要求3所述的新型用于智能家居机器人的室内定位方法,其特征在于,所述步骤s2中,世界坐标系的原点为自定义,选定房间天花板的一个特征信息为世界坐标系的原点,指挥智能家居机器人(1)在房间内按照顺序以一定速度采集房间顶部的图像,并记录相机(11)的偏移量;将原点与相机(11)的偏移量进行转换,得到全屋坐标系。
6.如权利要求1所述的新型用于智能家居机器人的室内定位方法,其特征在于,所述步骤s3中,全屋特征信息的提取,提取特征信息的轮廓,得到房间顶部的图像的特征坐标信息。
7.如权利要求1所述的新型用于智能家居机器人的室内定位方法,其特征在于,所述步骤s4中,智能家居机器人(1)的当前坐标信息是特征信息所在坐标的地面投影。
8.如权利要求1所述的新型用于智能家居机器人的室内定位方法,其特征在于,还包括如下步骤:
技术总结
本发明涉及智能家居、工业智能控制技术领域,具体涉及一种新型用于智能家居机器人的室内定位方法。本发明包括如下步骤:智能家居机器人顶部设置带有红外模块的相机,在人工指挥下,将室内所有房间进行遍历,采集所有房间顶部的图像并拼接为全屋顶部图像;将全屋顶部图像放置在同一世界坐标系下;对全屋顶部图像进行处理,提取对应的特征信息,特征信息表征每个房间天花板足以定位的区域;利用带有红外模块的相机扫描当前位置的房间顶部的图像;特征信息进行对比,从而根据天花板特征信息确定智能家居机器人的当前坐标信息,从而满足一定的定位、计算量和实时性要求。
技术研发人员:陈苏畅,孙倩文,田清吉
受保护的技术使用者:中山市家的电器有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!