一种GNSS和LNSS数据融合处理方法及系统
本发明涉及数据融合,特别是涉及一种gnss和lnss数据融合处理方法及系统。
背景技术:
1、全球导航卫星系统(gnss)因其全天候、高实时、高精度等优点被广泛应用于各个领域。目前提供服务的gnss共有四个,分别为美国的全球定位系统(gps)、俄罗斯的格洛纳斯系统(glonass)、欧盟的伽利略系统(galileo)以及中国的北斗卫星导航系统(bds)。bds由中国独立建设和运行,由地球静止轨道(geo)、倾斜地球同步轨道(igso)以及中圆地球轨道(meo)三类卫星组成。整体建设分为三个阶段,分别为验证系统(bds-1),扩展的区域导航系统(bds-2)以及全球导航系统(bds-3)。bds-3正式为全球用户提供服务,标志着bds建设圆满完成了三步走战略。
2、随着用户对导航定位需求的不断增长,高精度、高可靠、快收敛等要素受到越来越多gnss用户的关注,这促使了低地球轨道(leo)导航卫星系统的发展。相比于gnss卫星,leo卫星的轨道高度更低,这使得leo导航卫星系统,即低轨导航卫星系统(lnss)具有以下优势:1)对地几何结构变化快,显著改善了用户定位收敛时间;2)信号落地功率高,提升了导航定位抗干扰能力;3)星地通信能力强,有效增强了gnss服务能力。此外,对于bds,密集的leo卫星网可作为移动的监测站,这有效弥补了中国自主可控的地面监测站无法全球分布的问题,显著提升了基于区域地面监测站的bds卫星轨道和钟差解算精度。
3、多导航系统并存催生了多种观测数据融合处理的需求,随着lnss的发展,在原有地面监测站gnss观测和bds-3卫星星间链路(isl)观测的基础上,lnss的加入新增了地面监测站lnss观测、leo卫星星载gnss观测、leo卫星isl观测等信号源。如何基于gnss和lnss多源观测数据建立一套多源数据融合处理方法,对于保障正在建设的lnss提供高精度、高可靠、快收敛的定位、导航和授时(pnt)服务至关重要。
技术实现思路
1、本发明的目的是提供一种gnss和lnss数据融合处理方法及系统,以提供高精度可靠的导航定位。
2、为实现上述目的,本发明提供了如下方案:
3、一种gnss和lnss数据融合处理方法,所述方法包括:
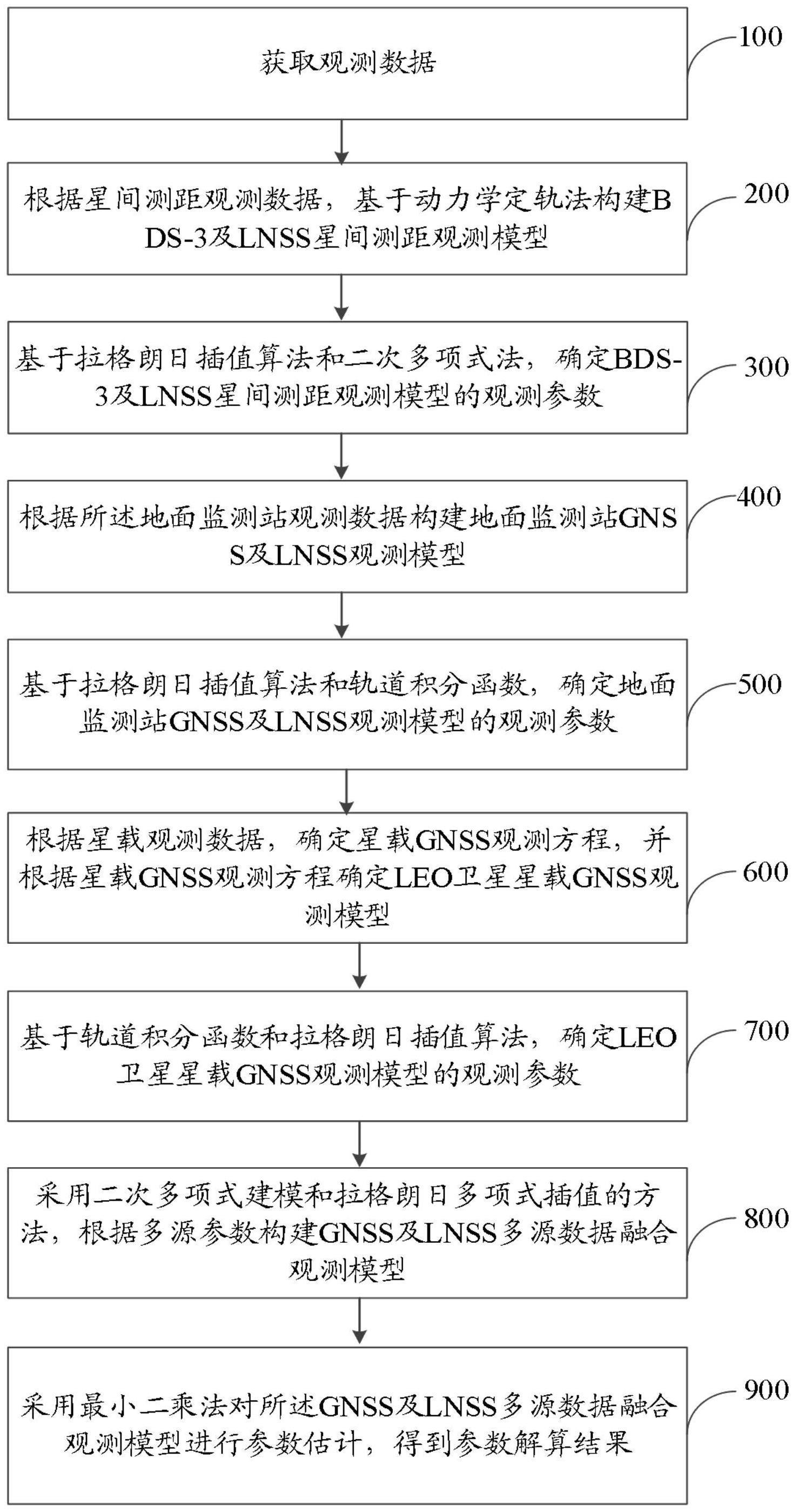
4、获取观测数据;所述观测数据包括:星间测距观测数据、地面监测站观测数据和星载观测数据;所述星间测距观测数据包括:bds-3星间测距观测数据和lnss星间测距观测数据;所述地面监测站观测数据包括:gnss观测数据和lnss观测数据;所述星载观测数据包括:leo卫星的星载gnss观测数据;
5、根据所述星间测距观测数据,基于动力学定轨法构建bds-3及lnss星间测距观测模型;
6、基于拉格朗日插值算法和二次多项式法,确定bds-3及lnss星间测距观测模型的观测参数;所述观测参数包括:信号发射时刻估计值、卫星动力学参数和卫星钟差;
7、根据所述地面监测站观测数据构建地面监测站gnss及lnss观测模型;所述地面监测站gnss及lnss观测模型,包括:伪距观测方程和载波相位观测方程;
8、基于拉格朗日插值算法和轨道积分函数,确定地面监测站gnss及lnss观测模型的观测参数;
9、根据所述星载观测数据,确定星载gnss观测方程,并根据所述星载gnss观测方程确定leo卫星星载gnss观测模型;
10、基于轨道积分函数和拉格朗日插值算法,确定所述leo卫星星载gnss观测模型的观测参数;
11、采用二次多项式建模和拉格朗日多项式插值的方法,根据多源参数构建gnss及lnss多源数据融合观测模型;所述多源参数包括:bds-3及lnss星间测距观测模型的观测参数、地面监测站gnss及lnss观测模型的观测参数,以及leo卫星星载gnss观测模型的观测参数;
12、采用最小二乘法对所述gnss及lnss多源数据融合观测模型进行参数估计,得到参数解算结果;所述参数解算结果用于表征卫星系统的定位导航和授时。
13、可选地,根据所述星间测距观测数据,基于动力学定轨法构建bds-3及lnss星间测距观测模型,具体包括:
14、根据所述星间测距观测数据建立星间链路测距观测方程;
15、根据卫星运行过程中的受力情况建立卫星受摄运动方程;
16、基于动力学定轨法,根据所述星间链路测距观测方程和所述卫星受摄运动方程,采用拉格朗日插值算法确定星间测距观测方程;
17、根据所述星间测距观测方程确定bds-3及lnss星间测距观测模型。
18、可选地,所述星间链路测距观测方程的表达式为:
19、
20、其中,lij为卫星j接收到的来自卫星i的伪距观测量;ri为卫星i在坐标系中的位置向量;rj为卫星j在坐标系中的位置向量;ti为卫星i发射信号的时刻;tj为卫星j接收到信号的时刻;c为光速;dti为卫星i的卫星钟差;dtj为卫星j的卫星钟差;为卫星j的信号接收时延;为卫星i的信号发射时延;为信号从卫星i到卫星j传播过程中的误差。
21、可选地,所述星间测距观测方程的表达式为:
22、
23、其中,lij为卫星j接收到的来自卫星i的伪距观测量;(xi,yi,zi)为卫星i的三维坐标;(xj,yj,zj)为卫星j的三维坐标;ti为卫星i发射信号的时刻;c为光速;dti为卫星i的卫星钟差;tj为卫星j接收到信号的时刻;dtj为卫星j的卫星钟差;为卫星j的信号接收时延;为卫星i的信号发射时延;为信号从卫星i到卫星j传播过程中的误差。
24、可选地,所述伪距观测方程的表达式为:
25、
26、所述载波相位观测方程的表达式为:
27、
28、其中,i为卫星号;p为伪距观测值;φ为载波相位观测值;ρ为卫星和测站间的几何距离;c为光速;dt为接收机钟差;dt为卫星钟差;dion为电离层延迟;dtro为对流层延迟;disb为isb;dspcc为卫星端天线pcc;drpcc为地面监测站天线pcc;dr为接收机端的dcb;ds为卫星端的dcb;δr为接收机端的相位硬件延迟;δs为卫星端的相位硬件延迟;λ为载波波长;n为整周模糊度;为接收机端的初始相位;为卫星端的初始相位;εp为伪距观测值的各剩余误差和观测噪声;εφ为载波相位观测值的各剩余误差和观测噪声。
29、可选地,所述gnss及lnss多源数据融合观测模型的表达式为:
30、
31、
32、
33、
34、
35、
36、
37、
38、其中,lij为卫星j接收到的来自卫星i的伪距观测量;ρij为卫星i和卫星j间的理论距离;c为光速;dtj为卫星j的卫星钟差;tj为卫星j接收到信号的时刻;dti为卫星i的卫星钟差;ti为卫星i发射信号的时刻;为卫星j的信号接收时延;为卫星i的信号发射时延;为信号从卫星i到卫星j传播过程中的误差;i为卫星号;p为伪距观测值;φ为载波相位观测值;ρ为卫星和测站间的几何距离;dt为接收机钟差;dt为卫星钟差;dion为电离层延迟;dtro为对流层延迟;dr为接收机端的dcb;ds为卫星端的dcb;εp为伪距观测值的各剩余误差和观测噪声;δr为接收机端的相位硬件延迟;δs为卫星端的相位硬件延迟;λ为载波波长;n为整周模糊度;为接收机端的初始相位;为卫星端的初始相位;εφ为载波相位观测值的各剩余误差和观测噪声;(xi,yi,zi)为卫星i的三维坐标;(xj,yj,zj)为卫星j的三维坐标;ti为卫星i发射信号的时刻;dti为卫星i的卫星钟差;tj为卫星j接收到信号的时刻;dtj为卫星j的卫星钟差;tk为第k时刻;k为序号;n为拉格朗日插值算法的阶数;l为序号;tl为第l时刻。
39、一种gnss和lnss数据融合处理系统,所述系统包括:
40、数据获取模块,用于获取观测数据;所述观测数据包括:星间测距观测数据、地面监测站观测数据和星载观测数据;所述星间测距观测数据包括:bds-3星间测距观测数据和lnss星间测距观测数据;所述地面监测站观测数据包括:gnss观测数据和lnss观测数据;所述星载观测数据包括:leo卫星的星载gnss观测数据;
41、第一模型构建模块,用于根据所述星间测距观测数据,基于动力学定轨法构建bds-3及lnss星间测距观测模型;
42、第一确定模块,用于基于拉格朗日插值算法和二次多项式法,确定bds-3及lnss星间测距观测模型的观测参数;所述观测参数包括:信号发射时刻估计值、卫星动力学参数和卫星钟差;
43、第二构建模块,用于根据所述地面监测站观测数据构建地面监测站gnss及lnss观测模型;所述地面监测站gnss及lnss观测模型,包括:伪距观测方程和载波相位观测方程;
44、第二确定模块,用于基于拉格朗日插值算法和轨道积分函数,确定地面监测站gnss及lnss观测模型的观测参数;
45、第三构建模块,用于根据所述星载观测数据,确定星载gnss观测方程,并根据所述星载gnss观测方程确定leo卫星星载gnss观测模型;
46、第三确定模块,用于基于轨道积分函数和拉格朗日插值算法,确定所述leo卫星星载gnss观测模型的观测参数;
47、模型构建模块,用于采用二次多项式建模和拉格朗日多项式插值的方法,根据多源参数构建gnss及lnss多源数据融合观测模型;所述多源参数包括:bds-3及lnss星间测距观测模型的观测参数、地面监测站gnss及lnss观测模型的观测参数,以及leo卫星星载gnss观测模型的观测参数;
48、求解模块,用于采用最小二乘法对所述gnss及lnss多源数据融合观测模型进行参数估计,得到参数解算结果;所述参数解算结果用于表征卫星系统的定位导航和授时。
49、一种电子设备,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行上述所述的gnss和lnss数据融合处理方法。
50、一种计算机可读存储介质,其存储有计算机程序,所述计算机程序被处理器执行时实现上述所述的gnss和lnss数据融合处理方法。
51、根据本发明提供的具体实施例,本发明公开了以下技术效果:
52、本发明提供了一种gnss和lnss数据融合处理方法及系统,根据获取的观测数据构建bds-3及lnss星间测距观测模型、地面监测站gnss及lnss观测模型和leo卫星星载gnss观测模型;然后分别确定各个观测模型的观测参数;采用二次多项式建模和拉格朗日多项式插值的方法,根据多源参数构建gnss及lnss多源数据融合观测模型;采用最小二乘法对gnss及lnss多源数据融合观测模型进行参数估计,得到参数解算结果;该参数解算结果用于表征卫星系统的定位导航和授时;本发明能够提供高精度可靠的导航定位。
- 还没有人留言评论。精彩留言会获得点赞!