一种基于多平台的河口羽流锋面观测系统的工作方法
本发明涉及海洋观测,具体而言,特别涉及一种基于多平台的河口羽流锋面观测系统的工作方法。
背景技术:
1、相比大尺度海洋现象,现阶段对河口羽流锋面过程认识有限,对其进行高分辨率的三维观测是研究河口羽流锋面的关键,同时也是难点之一。对于海洋锋面的观测通常是基于遥感技术的卫星观测,少数包括船载水文观测和argo观测。相对于空间尺度仅有几十米到几百米的河口小尺度羽流锋面过程而言,遥感资料的分辨率通常无法满足研究需求,而argo观测一般适用于深水区域,所以就需要高分辨率的船载水文观测,结合坐底观测提供的底边界信息,锚系温盐链提供的垂向信息,以及gps漂流浮标和无人机提供的表面信息,从而构建一套完整的高分辨率三维立体观测系统。
2、走航观测和定点观测是两种最常见的船载观测方法,且两种方法在其他河口锋面的观测中已经得到过成功应用。但目前对河口羽流锋面的观测缺乏完整的观测方案,如此存在诸多弊端,例如,由于仪器入水深度、观测盲区等因素的存在,大部分船载观测设备能走航观测锋面的三维结构变化但很难捕捉最上层和最底层内的水文要素和流动信息,无人机和gps漂流浮标表面观测能提供表面信息但缺乏锋面垂向结构信息,坐底观测能提供底边界层内的详细信息但对中上层的观测能力有限,定点剖面观测能抓住锋面垂向结构但很难刻画锋面传播过程中的动态变化,因此这就需要各种观测平台有机结合,克服单一观测方式的不足,充分发挥各种观测手段的优势。由于锋面是一个不断传播的现象,具有复杂的动力过程和三维结构,因此其观测系统的设计、观测方法的选择以及观测方案的实施都需要进行系统考虑,单一的观测方法很难对锋面的整个过程进行系统观测,因此需要整合多平台的各种观测手段,对河口羽流锋面的观测方法进行系统阐述。
技术实现思路
1、为了弥补现有技术的不足,本发明提供了一种基于多平台的河口羽流锋面观测系统的工作方法。本发明研究各种观测方法的有机结合,充分发挥各观测手段的优势,建立一套完整有效的河口羽流锋面观测系统,目的是提供一种河口羽流锋面的观测方法,以基于多种观测平台利用多种观测手段实现河口羽流锋面的三维立体观测。
2、本发明是通过如下技术方案实现的:
3、一种基于多平台的河口羽流锋面观测系统的工作方法,观测系统包括坐底架、锚系温盐链、gps漂流浮标、无人机、定点船和走航船,其中,无人机以定点船为起降平台,坐底架和锚系温盐链由定点船下放,坐底架内装配有坐底adcp、坐底adv、坐底ctd、坐底浊度计,坐底adcp为垂直向上设置, 坐底adv为垂直向下设置,坐底架顶端通过连接绳连接有坐底架浮球;锚系温盐链包括锚链,锚链的顶端连接有锚系温盐链浮球,锚链自上至下绑定有若干台锚系ctd,锚链的顶部和底部分别绑定有锚系浊度仪,锚链的底端通过声学释放器连接有配重块;
4、走航船搭载有走航adcp组件和温盐杆组件,走航adcp组件包括固定支架,固定支架的下端通过连接杆连接走航adcp,温盐杆组件包括温盐杆,温盐杆上安装有若干台走航ctd,温盐杆的顶端固定安装有活动圆环,温盐杆的底端安装有单向滚轮,滚轮连接有伸缩绳,温盐杆倾斜角度可调节;
5、走航船在锋面两侧间隔1海里的地方释放若干排gps漂流浮标,每排若干个;
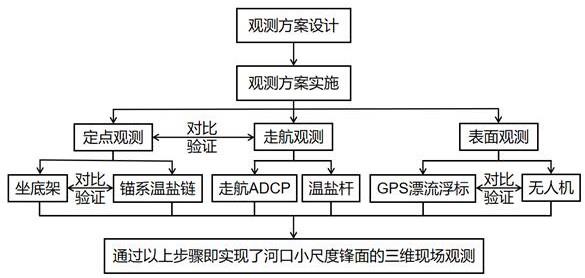
6、具体包括以下步骤:
7、s1、坐底架定点观测:利用无人机及望远镜确定锋面大致位置,在锋面传播路径处利用船载声纳扫描海底地形,在地势平坦处利用船只下放已安装观测设备的坐底架,用于观测锋面经过前后底边界层内的水文要素差异以及整个垂向剖面的流速大小;同时利用船只在坐底架位附近抛锚进行看守,抛锚地距坐底架距离大于与定点船的水平距离;
8、s2、锚系温盐链定点观测:在坐底架附近布放一条锚系温盐链,总长度小于局地水深,仪器布放上层密下层疏,用于测量锋面传播前后水体垂向温度、盐度、浊度差异;
9、s3、走航adcp和温盐杆走航观测:在定点观测的同时,进行同步的走航观测,走航船船速控制在1~2节;通过支架将向下打的走航adcp 固定在船体一侧,用于测量航线断面上流速剖面;
10、同时在走航船的另一侧安装一条温盐杆,用于观测锋面两侧温盐结构的变化;温盐杆长度小于局地水深,可以根据关注的水层通过收缩绳调整温盐杆倾斜角度;观察走航ctd入水深度、温盐杆倾斜角度和局地水深,保证最上层的走航ctd既不出水温盐杆也不触底;温盐杆底部的具有单向滚动功能的滚轮连接收缩绳,一旦温盐杆触底将带动滚轮滚动,收缩伸缩绳,增大温盐杆倾斜角度;
11、走航观测的具体步骤为:从距锋面前端 1海里的位置开始降低走航船船速,进行跨锋面的走航观测,当经过锋面时,继续降低船速;直等到锋面经过船的位置并离开1 海里后,完成一次单向跨锋面观测,然后调转航向,反向观测;若仅关注锋面传播过程中的动态变化,可以减小沿锋面走航路线长度,立即调转航向;若还关注锋面两侧沿锋面方向的水文变化,先沿平行与锋面的方向观测1海里,再调转航向,依此循环往复,走航路线呈s型;
12、s4、gps漂流浮标表面观测:利用走航船在锋面两侧间隔1海里的地方释放若干排gps漂流浮标,追踪表层水体运动,分析锋面对物质水平输运过程的影响,同时在无人机拍摄范围内投放 gps漂流浮标,校准无人机拍摄的表面流场;在航次结束后,根据实际条件,对gps漂流浮标进行回收;
13、s5、无人机表面观测:以定点船作为起降平台,利用无人机进行锋面处表面水色的连续拍摄;无人机静止,镜头俯仰角90°,垂直于海面;
14、 s6、通过以上步骤即实现了河口羽流锋面的三维观测。
15、作为优选方案,坐底架包括呈立方体的观测平台支架,观测平台支架内部设有固定仪器用的活动杆,观测平台支架的底部四角均固定安装有支腿,四条支腿的上下部通过固定横杆连接固定,坐底ctd和坐底浊度计分别固定安装在支腿上。
16、作为优选方案,锚链上绑定的7台锚系ctd,位于上层的第1~4台锚系ctd间隔为1m,位于下层的第4~7台锚系ctd间隔为2 m,锚系温盐链长度为11 m。
17、作为优选方案,走航adcp垂直向下,入水深度为1 m。
18、作为优选方案,gps漂流浮标包括gps定位器,gps定位器的底端连接有支撑杆,支撑杆的另一端连接浮体,浮体的底部连接有十字形的卡板。
19、作为优选方案,步骤s4中的无人机拍摄范围拟定为 100 m×100 m。
20、作为优选方案,走航船在锋面两侧间隔数1海里释放4排共计24个gps漂流浮标。
21、作为优选方案,温盐杆上安装有10台走航ctd。
22、本发明由于采用了以上技术方案,与现有技术相比使其具有以下有益效果:本发明基于多平台的海洋观测方法,将定点观测、走航观测、表面观测整合成一套相对完善且具有较高分辨率的观测系统,并将其应用于河口羽流锋面的三维观测,包括利用坐底架和温盐链进行定点观测,利用走航adcp和温盐杆进行走航观测,利用无人机进行表面摄影观测,利用gps漂流浮标进行表面追踪观测,克服了单一观测手段的缺点。鉴于当前对河口羽流锋面的观测手段极为有限,且没有成熟的观测系统作为参考,因此本发明对于观测羽流锋面具有重要指导作用,且对于发展羽流锋面的三维立体观测系统具有重要意义。
23、本发明的附加方面和优点将在下面的描述部分中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!