区域内导航路线计算方法、智能终端与流程
本发明涉及车辆导航,特别涉及一种区域内导航路线计算方法、智能终端。
背景技术:
1、在驾车导航过程中,路线规划能力提供了从起点到终点的行驶路线,供用户进行导航行驶,但这些路线起点经常是从一个较大范围的区域内(即无法精确导航区域)开始,终点选择也往往在一个较大范围内结束,比如从北京某个小区内部停车场到北京某个大院内部的停车场。
2、但在测绘活动中,由于区域内道路非市政道路,出于成本或者其他因素考虑,这些区域内道路往往没有被现场准确测绘,大部分通过影像描绘进行生产,由于影像的限制,会导致道路的偏差过大和道路的拓扑连接关系未能准确表达。由于路网不准确,在加上区域内道路往往比较狭窄和断头较多,在该区域内进行导航时候,经常会出现路线不通、错误或断头路的问题,上述问题给用户体验带来了极大的伤害。
3、因此,亟需一种区域内导航路线计算方法、智能终端来解决上述问题。
4、前面的叙述在于提供一般的背景信息,并不一定构成现有技术。
技术实现思路
1、本发明解决的技术问题在于,提供了一种区域内导航路线计算方法、智能终端,能够解决由于封闭区域内道路不准确和不正确,引起的区域内导航路线错误问题,提高了导航指引的正确性和增强了用户体验。
2、本发明解决其技术问题是采用以下的技术方案来实现的:
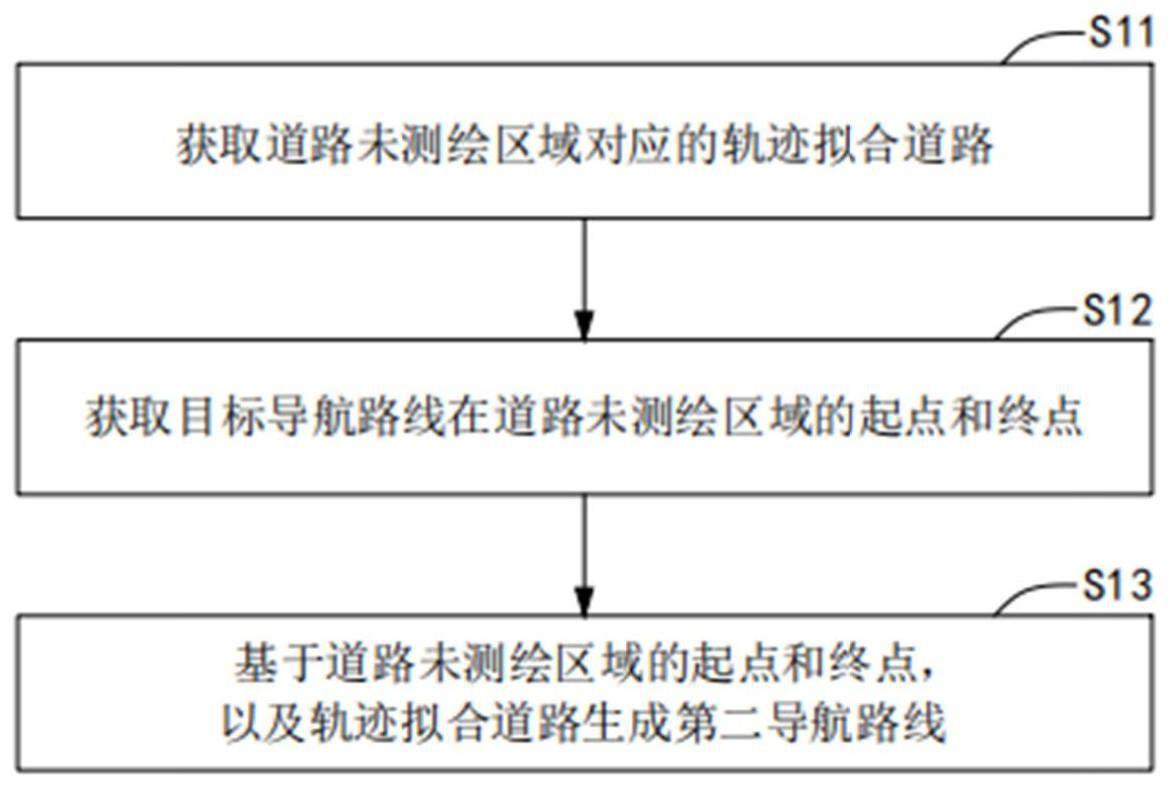
3、一种区域内导航路线计算方法,包括:基于导航目的地生成目标导航路线,所述目标导航路线包括道路测绘区域的第一导航路线和道路未测绘区域的第二导航路线;其中,在生成所述道路未测绘区域的第二导航路线时,获取道路未测绘区域对应的轨迹拟合道路;获取所述目标导航路线在道路未测绘区域的起点和终点;基于所述道路未测绘区域的起点和终点,以及所述轨迹拟合道路生成所述第二导航路线。
4、在本发明的较佳实施例中,上述获取道路未测绘区域对应的轨迹拟合道路的步骤之前包括:获取所述道路未测绘区域内的历史轨迹数据,并将所述道路未测绘区域划分成多个单位区域。
5、在本发明的较佳实施例中,上述将所述道路未测绘区域划分成多个单位区域的步骤包括:获取所述道路未测绘区域的形状信息,并根据所述形状信息生成导航区域矩形;基于预设长度和预设宽度对所述导航区域矩形进行划分,以生成多个单位区域。
6、在本发明的较佳实施例中,上述基于预设长度和预设宽度对所述导航区域矩形进行划分,以生成多个单位区域的步骤之后包括:获取各个单位区域内的行驶轨迹点;若行驶轨迹点位于所述单位区域的边界,则基于右下属于关系将对应行驶轨迹点添加到边界的右方单位区域、下方单位区域或右下方单位区域。
7、在本发明的较佳实施例中,上述获取各个单位区域内的行驶轨迹点的步骤之后包括:在单位区域中的行驶轨迹点数量超过阈值时,将单位区域添加到车道区域序列中;根据所述单位区域的相邻和跨接关系,对所述车道区域序列中的单位区域进行处理,生成所述道路未测绘区域的区域导航路线图。
8、在本发明的较佳实施例中,上述获取道路未测绘区域对应的轨迹拟合道路的步骤包括:基于所述区域导航路线图获取所述道路未测绘区域内的轨迹拟合道路。
9、在本发明的较佳实施例中,上述基于所述道路未测绘区域的起点和终点,以及所述轨迹拟合道路生成所述第二导航路线的步骤包括:根据所述道路未测绘区域的起点和终点从所述车道区域序列中,获取与所述起点距离最近的目标单位区域,将所述目标单位区域设置为道路规划起点;基于所述目标单位区域、所述终点和所述轨迹拟合道路,生成所述第二导航路线。
10、在本发明的较佳实施例中,上述基于所述道路未测绘区域的起点和终点,以及所述轨迹拟合道路生成所述第二导航路线的步骤还包括:获取所述单位区域的长度和宽度以及当前车辆信息,所述当前车辆信息包括车辆宽度;根据所述单位区域的位置信息获取所述车道区域序列中左右相邻的单位区域数量;根据所述当前车辆信息、所述单位区域的长度和宽度信息、所述单位区域数量、所述车道区域序列、起点和终点生成所述第二导航路线。
11、一种区域内导航路线计算方法,包括:在车辆的导航路线经过道路未测绘区域时,获取所述道路未测绘区域内的历史轨迹数据,并将所述道路未测绘区域划分成多个单位区域;根据所述历史轨迹数据获取各个单位区域中的行驶轨迹点;在所述单位区域中的行驶轨迹点数量超过阈值时,将所述单位区域添加到车道区域序列中,以生成轨迹拟合道路;获取所述导航路线在所述道路未测绘区域内的起点和终点;根据所述轨迹拟合道路、起点和终点生成第二导航路线。
12、一种智能终端,所述智能终端包括:存储器、处理器,其中,所述存储器上存储有区域内导航路线计算程序,所述区域内导航路线计算程序被所述处理器执行时实现如上述中任一项所述的区域内导航路线计算方法的步骤。
13、本发明采用上述技术方案达到的技术效果是:当导航路线经过道路未测绘区域时,采用轨迹拟合的方式,获取道路未测绘区域的详细道路信息,然后根据轨迹拟合得到的道路生成道路未测绘区域内第二导航路线,从而避免由于道路未测绘区域内道路不准确和不正确等,引起的道路未测绘区域内的导航路线规划错误,实现了道路未测绘区域内的导航路线规划,以引导车辆行驶到道路未测绘区域外市政道路,或者道路未测绘区域内的目标位置,提高了车辆导航指引的正确性和精度、增强了用户体验。
14、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明。
技术特征:
1.一种区域内导航路线计算方法,其特征在于,包括:
2.如权利要求1所述的区域内导航路线计算方法,其特征在于,获取道路未测绘区域对应的轨迹拟合道路的步骤之前包括:
3.如权利要求2所述的区域内导航路线计算方法,其特征在于,将所述道路未测绘区域划分成多个单位区域的步骤包括:
4.如权利要求3所述的区域内导航路线计算方法,其特征在于,基于预设长度和预设宽度对所述导航区域矩形进行划分,以生成多个单位区域的步骤之后包括:
5.如权利要求4所述的区域内导航路线计算方法,其特征在于,获取各个单位区域内的行驶轨迹点的步骤之后包括:
6.如权利要求5所述的区域内导航路线计算方法,其特征在于,获取道路未测绘区域对应的轨迹拟合道路的步骤包括:
7.如权利要求6所述的区域内导航路线计算方法,其特征在于,基于所述道路未测绘区域的起点和终点,以及所述轨迹拟合道路生成所述第二导航路线的步骤包括:
8.如权利要求6所述的区域内导航路线计算方法,其特征在于,基于所述道路未测绘区域的起点和终点,以及所述轨迹拟合道路生成所述第二导航路线的步骤还包括:
9.一种区域内导航路线计算方法,其特征在于,包括:
10.一种智能终端,其特征在于,所述智能终端包括:存储器、处理器,其中,所述存储器上存储有区域内导航路线计算程序,所述区域内导航路线计算程序被所述处理器执行时实现如权利要求1至9中任一项所述的区域内导航路线计算方法的步骤。
技术总结
本发明提供了一种区域内导航路线计算方法、智能终端,包括:基于导航目的地生成目标导航路线,所述目标导航路线包括道路测绘区域的第一导航路线和道路未测绘区域的第二导航路线;其中,在生成所述道路未测绘区域的第二导航路线时,获取道路未测绘区域对应的轨迹拟合道路;获取所述目标导航路线在道路未测绘区域的起点和终点;基于所述道路未测绘区域的起点和终点,以及所述轨迹拟合道路生成所述第二导航路线。本发明在车辆需要经过道路未测绘区域时,基于道路未测绘区域内的历史轨迹数据,通过轨迹聚类和拟合得到道路未测绘区域内的轨迹拟合道路,从而进行导航路线规划,提高了道路未测绘区域内导航指引的正确性。
技术研发人员:张江日
受保护的技术使用者:杭州朗歌科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!