基于升降平台的多层耦合柔性板结构的振动测控装置和方法
本发明涉及振动控制领域,特别涉及一种基于升降平台的多层耦合柔性板结构的振动测控装置和方法。
背景技术:
1、随着空间科学技术的不断发展,航天器结构正朝着大型化、轻质化和灵活化的方向发展,对能源的需求也越来越大。作为航天器上最为典型的大型柔性构件之一,太阳能帆板是典型的可展开空间平板阵列结构,可为单板或多板,多板之间一般通过铰链进行相连。航天器在执行变轨或对接等操作时,时常需要进行轴向平移和绕轴旋转等运动,太阳能帆板等柔性结构的振动随着运动的冲击而被激励,短时间内难以自然衰减,若不加以抑制,会影响自身工作状态,降低航天器的精度和寿命。所以,有必要对大型柔性结构的振动测量和控制进行研究。
2、对于柔性薄板结构的振动测量,传统的测量方法主要采用压电陶瓷传感器、加速度传感器、应变计等传感器件。由于传感器与被测对象直接接触,将不可避免地在被测对象上附加一些物理效应,尤其是轻质结构,会导致系统本来结构的固有特性发生改变,影响测试的准确性。而作为非接触式测量的代表之一,双目视觉测量一般是通过视差原理解算出目标点的三维世界坐标来实现,具有全局性测量特点,适用于视场内大范围运动时的振动检测,是立体视觉最常用的实现方式。此外,双目视觉在测量时不改变结构的频率、振幅等振动特性,可以很好地避免负载效应,所以在大型柔性结构振动测量及主动控制的研究中具有很大的优势。
3、在振动的被动控制上,合理地设计隔振缓冲层能够有效吸收振动能量,达到减振的效果。近年来,受益于3d打印技术快速发展,机械超材料因其优异的动态和静态性能而受到广泛关注,相关研究也取得了卓越的成果。超材料是人工设计的,通常由周期性排列的结构单元组成,以获得超越组成材料的性能,在能量吸收和减振领域展现出良好的应用前景。
技术实现思路
1、为了克服现有技术的上述缺点与不足,本发明的目的在于提供一种基于升降平台的多层耦合柔性板结构的振动测控装置和方法。
2、本发明的目的通过以下技术方案实现:
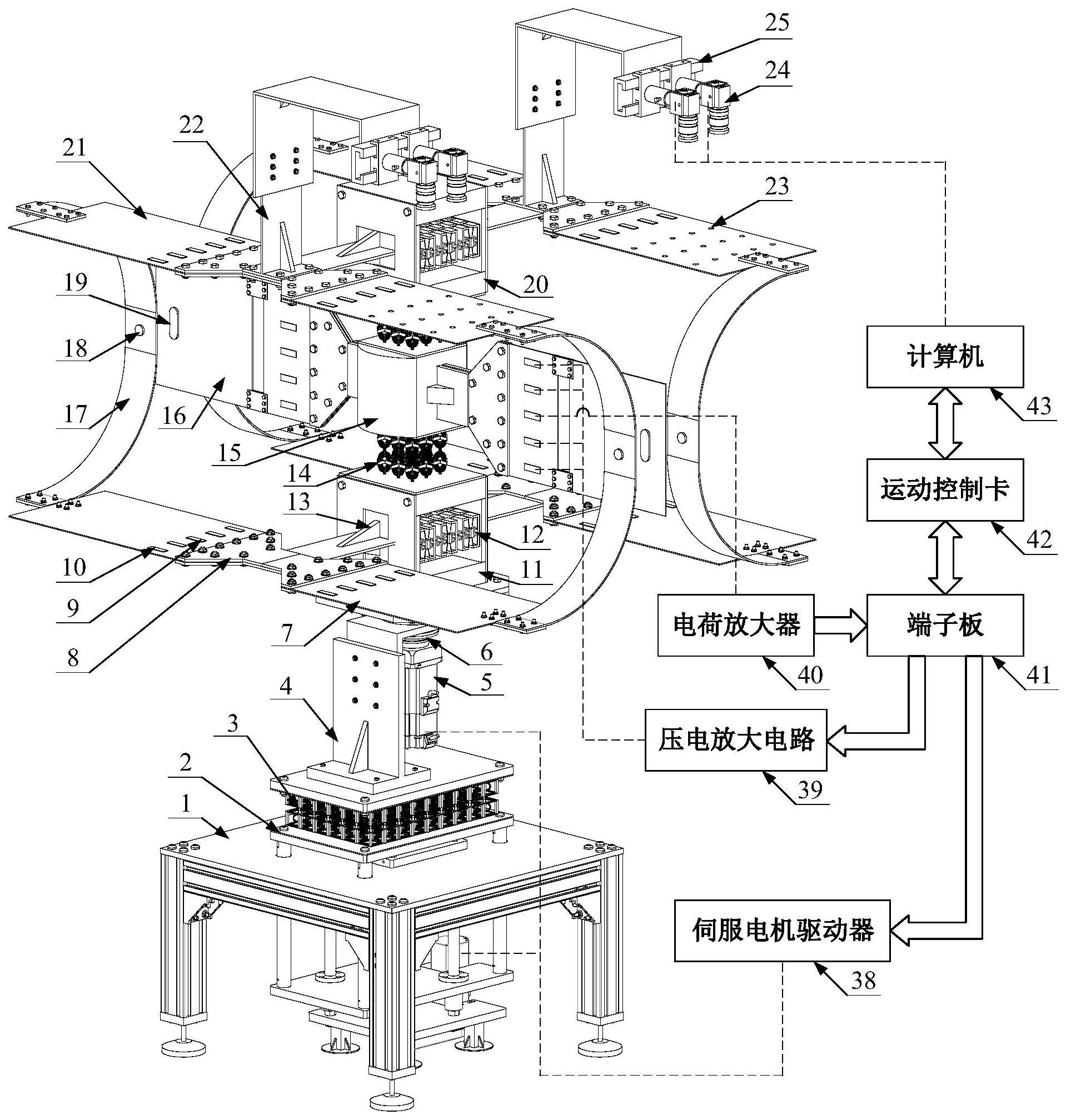
3、一种基于升降平台的多层耦合柔性板结构的振动测控装置,包括多层耦合柔性板本体部分、传动部分、振动检测部分及驱动控制部分;
4、所述多层耦合柔性板本体部分,包括上水平悬臂板层、下水平悬臂板层及竖直铰接板层,所述上、下水平悬臂板层通过柔性曲梁耦合,所述竖直铰接板层位于上、下水平悬臂板层的中间,柔性曲梁通过磁力实现水平悬臂板层与竖直铰接板层之间的耦合;所述上、下水平悬臂板层通过第二隔振层与竖直铰接板连接;
5、所述传动部分包括升降机构和旋转机构;
6、所述升降机构带动与其连接的多层耦合柔性板本体部分沿竖直方向做平移运动;
7、所述旋转机构带动多层耦合柔性板本体部分绕竖直方向转动;
8、所述检测部分,用于检测上水平悬臂板层、下水平悬臂板层及竖直铰接板层的振动信息;
9、所述控制部分,用于通过振动信息获得控制信号,抑制上水平悬臂板层、下水平悬臂板层及竖直铰接板层的振动。
10、进一步,所述上、下水平悬臂板层的结构相同,包括水平层基座,所述水平层基座的两侧对称设置柔性悬臂板,水平放置,所述柔性悬臂板为四块,所述柔性悬臂板的固定端与水平层支架固定,另一端为自由端,上水平悬臂板层与下水平悬臂板层中的柔性悬臂板自由端通过柔性曲梁耦合。
11、进一步,所述竖直铰接板层包括竖直层基座和两块柔性铰接板,所述两块柔性铰接板设置在竖直层基座的两侧,且对称分布,所述柔性铰接板的一端为固定端与竖直层基座连接,柔性铰接板的另一端为自由端,所述柔性铰接板设置在上、下水平悬臂板层的中间。
12、进一步,所述柔性曲梁有四个,关于柔性铰接板对称分布,所述柔性曲梁设置磁铁块,所述柔性铰接板的自由端设置磁铁块,所述柔性曲梁为半圆形,通过两端受力产生形变改变磁铁块之间的相对位置,从而改变磁铁块间的相互作用力。
13、进一步,所述升降机构包括第二伺服电机、同步带、带轮、丝杠轴、轴承、导柱及升降平台,所述升降平台的顶部与第一隔振层固定,升降平台的底部与导柱连接,构成竖直方向的移动副,基座底板通过四根导柱及一根丝杠轴与基座顶板连接,第二伺服电机通过同步带带动丝杠轴转动,驱动升降平台沿导柱在竖直方向移动,带动与其连接的多层耦合柔性板本体部分沿竖直方向做平移运动。
14、进一步,所述旋转机构包括第一伺服电机、行星减速器、法兰及旋转平台,所述第一伺服电机通过行星减速器进行减速,所述行星减速器的输入端与第一伺服电机连接,其输出端与法兰连接,带动法兰转动,所述旋转台的下端与法兰连接,所述旋转平台的上端与下水平悬臂板层连接。
15、进一步,所述检测部分包括压电纤维片传感器及双目视觉测量单元,
16、所述柔性悬臂板及柔性铰接板靠近固定端的一侧设置压电纤维片传感器;所述压电纤维片传感器检测振动信号,经过电荷放大器放大后,通过端子板传输至运动控制卡,再通过运动控制卡内部的a/d转换模块将模拟信号转换成数字信号后,传输至计算机中;
17、所述双目视觉测量单元包括工业相机和圆形标志点,所述柔性悬臂板粘有标志点,标志点在工业相机的视野范围内,所述工业相机拍摄标志点图像输入计算机。
18、进一步,所述控制部分包括压电纤维驱动器,粘贴在柔性悬臂板及柔性铰接板的固定端,计算机得到振动反馈信号经运动控制卡,通过端子板传输,经过压电放大电路放大后,输出压电纤维片驱动器,抑制柔性板的振动。
19、进一步,所述标志点包括15个,大小相等,呈5×3阵列排布,关于柔性悬臂板的中线对称。
20、进一步,第二隔振层由巢状子单元构成的网格结构周期性排列构成。
21、进一步,所述第一隔振层由多稳态准零刚度超材料单元周期性排列构成。
22、一种基于所述的振动测控装置的方法,包括:
23、步骤一 利用计算机控制伺服电机驱动多层耦合柔性板结构升降或旋转,以执行输入的期望轨迹,激励各柔性板产生相应的振动;
24、步骤二 利用压电纤维片传感器和双目视觉系统测量检测各柔性板的振动,得到相应的测量信号;
25、步骤三 将步骤二采集到的压电传感器信号由电荷放大器放大处理后,通过端子板传输到运动控制卡,再通过运动控制卡内部的a/d转换模块将模拟信号转换成数字信号后,传输至计算机中;将工业相机检测的信号直接输入到计算机中进行处理,得到相应的振动反馈信号;
26、步骤四 将步骤三中得到的检测信号,通过计算机运行相应的控制算法,进而得到相应的振动反馈信号经运动控制卡的d/a模块输出,通过端子板的传输,再经过压电放大电路放大处理后,输出到压电纤维片驱动器中,从而抑制多层耦合柔性板结构的振动;
27、步骤五 通过调整控制算法及其参数,反复试验,获得多组实验数据,并对多层耦合柔性板结构的振动特性和控制效果进行分析。
28、与现有技术相比,本发明具有以下优点和有益效果:
29、(1)本发明可研究多层耦合柔性板结构升降或旋转过程中的振动检测及控制方法,用于模拟具有多柔性耦合附件下的航天器进行轴向运动和绕轴运动,通过检测到的振动信号来获取结构运动中的振动特性,有利于后续的振动控制。
30、(2)本发明采用了双目视觉检测方式来测量柔性板的振动位移,相比于其它传感器,具有非接触测量,不增加结构附加质量,多点测量等优点,能够反映柔性板振动的全局特性。
31、(3)本发明通过合理的机械设计,利用曲梁的受力形变结合磁力将水平悬臂板层和竖直铰接板层进行耦合,可研究具有曲梁和磁力耦合、考虑重力作用下的多层耦合柔性板结构升降或旋转时的振动特性。
32、(4)本发明采用了多种不同的机械超材料为系统结构层级之间提供缓冲隔振,为多层耦合柔性板结构的振动被动控制提供了新的解决方案,具有一定的参考价值和意义。
33、(5)本发明为多传感器融合系统,既有双目视觉传感器,又有压电纤维片传感器,可通过多传感器融合对铰接板结构的弯曲和扭转模态进行辨识研究,还可通过双目视觉采集标志点振动信息并将其可视化。
- 还没有人留言评论。精彩留言会获得点赞!