一种道路及附属物的实时监测定位方法、系统及装置
本发明涉及监测定位,特别是涉及一种道路及附属物的实时监测定位方法、系统及装置。
背景技术:
1、道路及其附属物检测的方法分为动态检测和静态检测两部分。动态检测是利用动态道路监测车对道路及其附属物进行定位与监测的方法,静态检测是利用绝对测量模式对道路及其附属设施进行定位与监测的方法。大型的动态道路监测车虽然速度快但是精度不够,成本高,便利性不足,具有一定局限性。绝对测量主要有极坐标法、gnss的ppk法等等。极坐标法的全站仪对外界环境要求苛刻且测量速度慢,ppk法的卫星信号受环境影响被干扰、遮挡,影响定位结果的准确性且不具备实时性,均有一定不足。总结来说,传统的道路及其附属物监测技术存在难以兼顾检测精度、检测效率、和实时性的问题。
技术实现思路
1、本发明的目的是提供一种道路及附属物的实时监测定位方法、系统及装置,实现对于道路及附属物的精确定位。
2、为实现上述目的,本发明提供了如下方案:
3、第一方面,本发明提供一种道路及附属物的实时监测定位方法,包括:
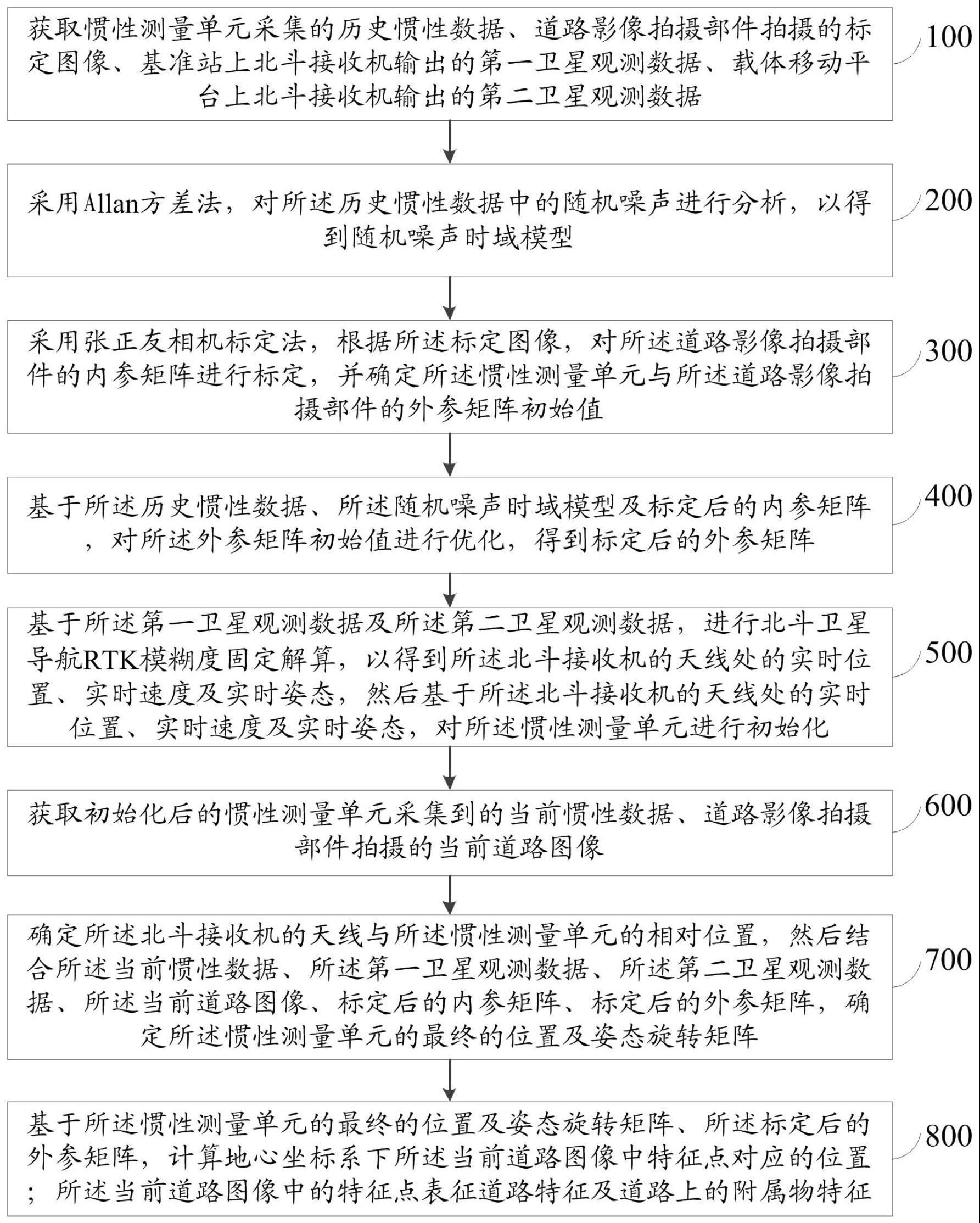
4、获取惯性测量单元采集的历史惯性数据、道路影像拍摄部件拍摄的标定图像、基准站上北斗接收机输出的第一卫星观测数据、载体移动平台上北斗接收机输出的第二卫星观测数据;所述惯性测量单元及所述道路影像拍摄部件均设置在所述载体移动平台上;
5、采用allan方差法,对所述历史惯性数据中的随机噪声进行分析,以得到随机噪声时域模型;
6、采用张正友相机标定法,根据所述标定图像,对所述道路影像拍摄部件的内参矩阵进行标定,并确定所述惯性测量单元与所述道路影像拍摄部件的外参矩阵初始值;
7、基于所述历史惯性数据、所述随机噪声时域模型及标定后的内参矩阵,对所述外参矩阵初始值进行优化,得到标定后的外参矩阵;
8、基于所述第一卫星观测数据及所述第二卫星观测数据,进行北斗卫星导航rtk模糊度固定解算,以得到所述北斗接收机的天线处的实时位置、实时速度及实时姿态,然后基于所述北斗接收机的天线处的实时位置、实时速度及实时姿态,对所述惯性测量单元进行初始化;
9、获取初始化后的惯性测量单元采集到的当前惯性数据、道路影像拍摄部件拍摄的当前道路图像;
10、确定所述北斗接收机的天线与所述惯性测量单元的相对位置,然后结合所述当前惯性数据、所述第一卫星观测数据、所述第二卫星观测数据、所述当前道路图像、标定后的内参矩阵、标定后的外参矩阵,确定所述惯性测量单元的最终的位置及姿态旋转矩阵;
11、基于所述惯性测量单元的最终的位置及姿态旋转矩阵、所述标定后的外参矩阵,计算地心坐标系下所述当前道路图像中特征点对应的位置;所述当前道路图像中的特征点表征道路特征及道路上的附属物特征。
12、第二方面,本发明提供一种道路及附属物的实时监测定位系统,包括:
13、数据获取模块,用于获取惯性测量单元采集的历史惯性数据、道路影像拍摄部件拍摄的标定图像、基准站上北斗接收机输出的第一卫星观测数据、载体移动平台上北斗接收机输出的第二卫星观测数据;所述惯性测量单元及所述道路影像拍摄部件均设置在所述载体移动平台上;
14、噪声分析模块,用于采用allan方差法,对所述历史惯性数据中的随机噪声进行分析,以得到随机噪声时域模型;
15、内参标定模块,用于采用张正友相机标定法,根据所述标定图像,对所述道路影像拍摄部件的内参矩阵进行标定,并确定所述惯性测量单元与所述道路影像拍摄部件的外参矩阵初始值;
16、外参标定模块,用于基于所述历史惯性数据、所述随机噪声时域模型及标定后的内参矩阵,对所述外参矩阵初始值进行优化,得到标定后的外参矩阵;
17、北斗定位解算模块,用于基于所述第一卫星观测数据及所述第二卫星观测数据,进行北斗卫星导航rtk模糊度固定解算,以得到所述北斗接收机的天线处的实时位置、实时速度及实时姿态,然后基于所述北斗接收机的天线处的实时位置、实时速度及实时姿态,对所述惯性测量单元进行初始化;
18、当前数据获取模块,用于获取初始化后的惯性测量单元采集到的当前惯性数据、道路影像拍摄部件拍摄的当前道路图像;
19、位置确定模块,用于确定所述北斗接收机的天线与所述惯性测量单元的相对位置,然后结合所述当前惯性数据、所述第一卫星观测数据、所述第二卫星观测数据、所述当前道路图像、标定后的内参矩阵、标定后的外参矩阵,确定所述惯性测量单元的最终的位置及姿态旋转矩阵;
20、道路及附属物定位模块,用于基于所述惯性测量单元的最终的位置及姿态旋转矩阵、所述标定后的外参矩阵,计算地心坐标系下所述当前道路图像中特征点对应的位置;所述当前道路图像中的特征点表征道路特征及道路上的附属物特征。
21、第三方面,本发明提供一种道路及附属物的实时监测定位装置,包括惯性测量单元、道路影像拍摄部件、北斗接收机、5g通讯模块、fpga板卡及载体移动平台;
22、所述惯性测量单元、所述道路影像拍摄部件、所述北斗接收机、所述5g通讯模块及所述fpga板卡均设置在所述载体移动平台上;
23、所述惯性测量单元、所述道路影像拍摄部件、所述北斗接收机及所述5g通讯模块,均与所述fpga板卡电连接;
24、所述惯性测量单元用于采集惯性数据;
25、所述道路影像拍摄部件用于采集标定图像及当前道路图像;
26、所述北斗接收机用于接收卫星观测数据;
27、所述fpga板卡用于执行道路及附属物的实时监测定位方法,以得到地心坐标系下所述当前道路图像中特征点对应的位置;
28、所述5g通讯模块用于将所述当前道路图像中特征点对应的位置发送给远程终端。
29、根据本发明提供的具体实施例,本发明公开了以下技术效果:
30、本发明公开一种道路及附属物的实时监测定位方法、系统及装置,采用allan方差法对惯性数据中的随机噪声进行分析,以得到随机噪声时域模型;采用张正友相机标定法,对道路影像拍摄部件的内参矩阵进行标定,对外参矩阵初始值进行标定。基于卫星观测数据,进行北斗卫星导航rtk模糊度固定解算,以得到北斗接收机的天线处的实时位置、实时速度及实时姿态,然后基于北斗接收机的天线处的实时位置、实时速度及实时姿态。然后,确定北斗接收机的天线与惯性测量单元的相对位置,然后结合当前惯性数据、所述第一卫星观测数据、所述第二卫星观测数据、当前道路图像、标定后的内参矩阵、标定后的外参矩阵,确定惯性测量单元的最终的位置及姿态旋转矩阵;进而计算地心坐标系下所述当前道路图像中特征点对应的位置;当前道路图像中的特征点表征道路特征及道路上的附属物特征。
31、综上,本发明基于北斗卫星导航系统实时动态差分定位技术的长期高精度定位稳定性、ins的短期定位稳定性以及高自主性、视觉导航丰富的图像信息,采用实时北斗rtk/ins/视觉紧组合数据处理方法,获得道路及其附属物的高精度的三维位置坐标,实现日常低成本智能化道路巡检。其中,实时北斗rtk本身可提供厘米级的实时位置信息,实时rtk/ins/视觉紧组合技术可提供高精度、连续、稳定的实时精密位置、速度、姿态信息,同时,应用针孔相机投影理论,可实现道路及其附属物位置精确确定。为进一步实现道路及其附属物位置偏移监测,利用影像特征点与监测物体的内在空间关系,对路产设施及路面进行精确识别、鉴定和车道级精准位置标定,为道路巡查计划、养护计划和管理提供辅助决策支持。
- 还没有人留言评论。精彩留言会获得点赞!