基于铰点力测量的车轮力感知系统及方法
本发明涉及车轮力传感领域,具体涉及一种基于铰点力测量的车轮力感知系统及方法。
背景技术:
1、车轮力是路面作用于车轮的力,决定着车辆行驶时的运动行为。车轮力检测已广泛应用于车辆试验开发过程中的载荷谱辨识和标定,在车辆产品使用过程中的路面环境识别、主动安全、运动稳定性控制、故障诊断、结构健康监测以及智能底盘驱动控制等方面,还将具有更广泛的应用前景。
2、车轮力检测方法是通过测得力敏弹性体的应变或变形数据以及数据处理算法来实时检测车轮力。从力传感和检测原理可知,力敏弹性体可嵌入于轮力传递到车体路径的任何节点(下面称为感知节点):地面→胎面→轮辋→轮毂轴承→转向节或电动轮壳体或车桥→球铰→悬架导向机构及弹簧和减振器→轴铰→车体。不同的汽车底盘和悬挂结构,上述车轮力的传递路径将有所不同。而且注意到在上述传递路径中,在轮毂轴承的滚动体之前的节点(下面称为旋转节点)都是随着车轮旋转的,滚动体之后的节点(下面称为非旋转节点)不随车轮旋转,但会随着车轮而跳动。
3、目前的车轮力检测方法中,将感知节点布置在旋转节点上有两种:一种是布置在轮胎上的被称为智能轮胎(us011548329b2);智能轮胎是在轮胎上布置导电聚合物或碳纤维等应变丝,直接测量轮胎胎壁应变或变形,但由于橡胶轮胎是非线性材料,其应力应变本构关系非常复杂,因此从轮胎胎壁应变或变形数据转换到车轮力的处理算法非常复杂,其测量精度受到所采用的动态轮胎模型精度的影响;另一种是布置在车轮轮辋(cn102636299a,us006324919b1),其力敏弹性体采用轮辐式结构,但由于力敏弹性体随车轮一起旋转,能量和信号传输是较难解决的问题,还需要另外增设用于测量旋转位置的编码器和方位检测装置,才能将所测的车轮力转换到整车坐标系中进行度量,以用于汽车运动控制,因此实现过程复杂,消耗较高。将感知节点布置在非旋转节点的有两种:一种是布置在轮毂轴承外圈,由于轴承外圈结构过于简单,车轮力测量的灵敏度和精度不高;另一种是将感知节点布置在转向节(us10272720 b2),由于转向节是车轮与悬挂/转向机构连接的集结体,支承并带动前轮绕主销转动而使汽车转向;在汽车行驶状态下,它承受并传递轮力,因此通过检测转向节的应变/变形,也可检测出车轮力,但是由于复杂转向节结构造成车轮力与转向节的应变数据之间存在着复杂的对应关系,因此多维多向的车轮力解耦算法非常困难,检测精度不理想。
4、因此,需要一种便于车辆产品使用过程中的车轮力感知系统及方法,易于安装嵌入到产品、且测量精度较高而实现过程简易。
技术实现思路
1、有鉴于此,本发明的目的是克服现有技术中的缺陷,提供基于铰点力测量的车轮力感知系统及方法,能够快速有效地解算车轮力,测量精度高,适用范围广。
2、本发明的基于铰点力测量的车轮力感知系统,至少包括一个安装在车轮与悬挂和/或转向机构相连的铰点位置的铰点力传感器;将车轮作为一个整体进行动力学平衡分析,通过建立车轮力和铰点力传感器测量得到的铰点力之间的动力学平衡方程,计算得到车轮坐标系下的车轮力的一个或多个方向的分力或分力矩。
3、进一步,为了提高车轮力检测精度,至少还包括一个用于测量车轮和车体的一个或多个方向的加速度传感器和/或角加速度传感器,将加速度传感器和/或角加速度传感器的测量值与车轮质量或转动惯量进行计算,得到车轮运动过程中的车轮惯性力和/或惯性力矩;将车轮作为一个整体进行动力学平衡分析,通过建立所述铰点力、惯性力和/或惯性力矩、车轮力之间的动力学平衡方程,计算得到车轮坐标系下的车轮力的一个或多个方向的分力或分力矩。
4、更进一步地,将用于测量车轮的所述加速度传感器和/或角加速度传感器,用设置于车轮与车体之间的悬挂和/或转向机构中的至少一个二力杆件的第一和/或第二铰点力传感器代替;利用第一和/或第二铰点力传感器测量得到的三向分力,计算得到悬挂和/或转向机构的杆件之间的夹角,利用空间机构的几何约束关系,解算得到悬挂机构和/或转向机构的位形;根据连续测量计算得到位形的时间变化,计算出车轮相对于车体的加速度和/或角加速度,并与车体的一个或多个方向的加速度和/或角加速度计算出车轮的加速度和/或角加速度。
5、进一步,为了使得检测到的车轮力用于车辆运动控制等的场合,至少还包括一个用于测量车轮相对于车体方向的方向角传感器;通过方向角传感器测量得到的方向角构成的角度坐标变换,将计算得到的车轮坐标系下的车轮力,转换到车体坐标系下的车轮力。
6、再进一步地,将所述方向角传感器用设置于车轮与车体之间的悬挂和/或转向机构中的至少一个二力杆件的所述第一和/或第二铰点力传感器代替;利用第一和/或第二铰点力传感器测量得到的三向分力,计算得到悬挂和/或转向机构的杆件之间的夹角,利用空间机构的几何约束关系,解算得到车轮相对于车体方向的方向角。
7、进一步,所述第一和/或第二铰点力传感器布置在车轮侧,还用于测量车轮与悬挂和/或转向机构相连的铰点位置的铰点力。
8、进一步,利用所述第一和/或第二铰点力传感器测量得到的三向分力,计算得到悬挂和/或转向机构的杆件之间的夹角与车轮方位的几何对应关系,将悬挂和/或转向机构的几何尺寸和约束关系以数据表格形式进行存储,用于在线的快速查表和车轮惯性力和/或惯性力矩以及所述方向角的动态插值计算。
9、一种基于铰点力测量的车轮力感知方法,包括:
10、将车轮作为一个整体进行动力学平衡分析,通过建立车轮力和铰点力之间的动力学平衡方程,计算得到车轮坐标系下的车轮力的一个或多个方向的分力或分力矩;其中,所述铰点力为车轮与悬挂和/或转向机构相连的铰点位置的铰点力。
11、进一步,将车轮和车体的一个或多个方向的加速度和/或角加速度与车轮质量或转动惯量进行计算,得到车轮运动过程中的车轮惯性力和/或惯性力矩;将车轮作为一个整体进行动力学平衡分析,通过建立所述铰点力、惯性力和/或惯性力矩、车轮力之间的动力学平衡方程,计算得到车轮坐标系下的车轮力的一个或多个方向的分力或分力矩。
12、进一步,通过车轮相对于车体方向的方向角构成的角度坐标变换,将计算得到的车轮坐标系下的车轮力,转换到车体坐标系下的车轮力。
13、进一步,解算得到悬挂机构或转向机构的位形,根据位形确定车轮方位,具体包括:
14、s11.分别构建在整车参考系{v}下描述的b点的位置向量vpb以及c点的位置向量vpc的表达式:
15、
16、
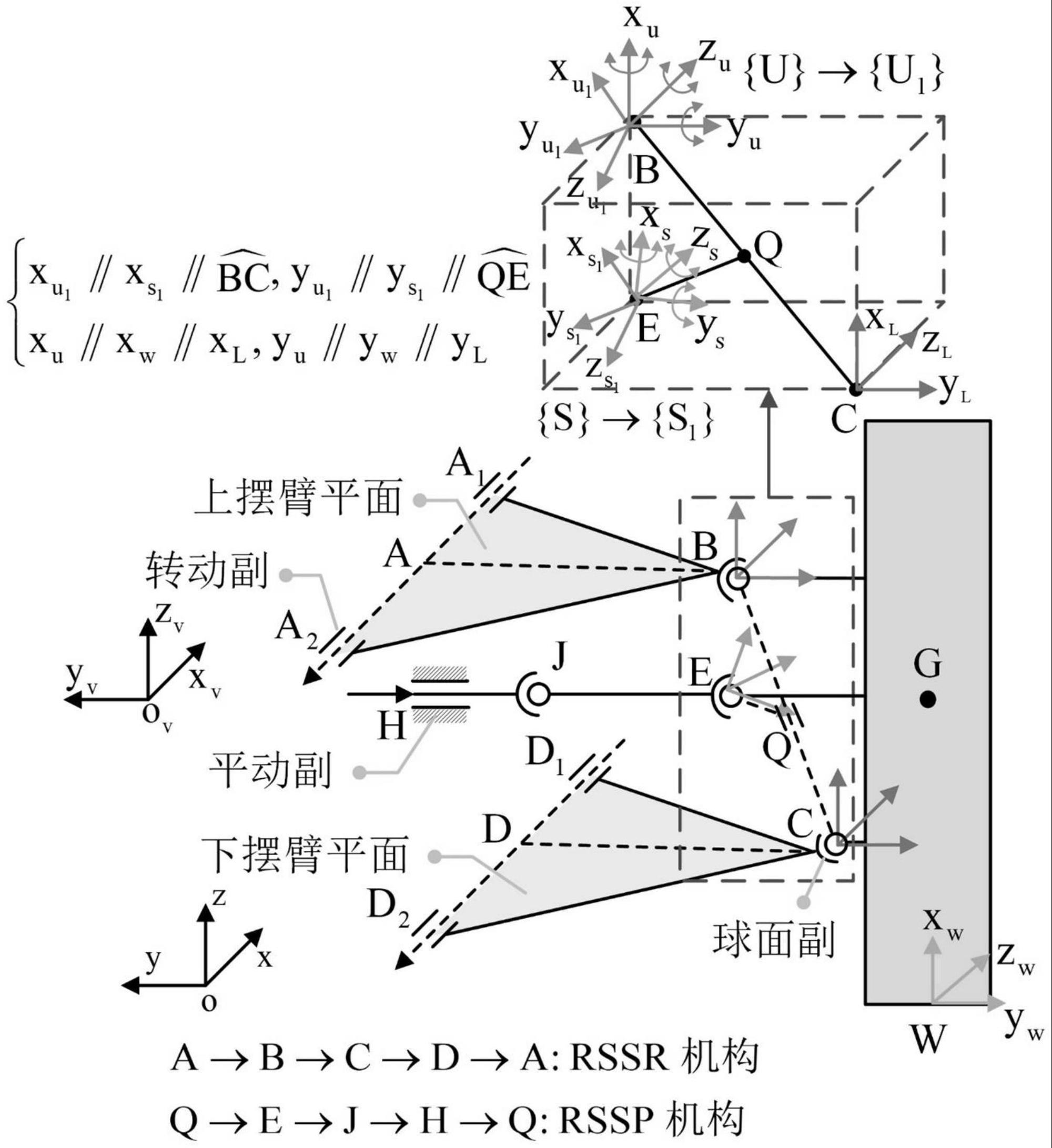
17、其中,vr2=[vx2,vy2,vz2]是一个3×3的旋转矩阵,vx2为公垂线x2在整车参考系{v}下描述的单位向量,vy2、vz2分别为{2}参考系的y轴和z轴在整车参考系{v}下描述的单位向量;β13是z1轴和z3轴之间的夹角,上横臂平面转动等效于围绕z1轴旋转的连杆l1,下横臂平面转动等效于连杆l3围绕z3轴的旋转,θ1为主动旋转角度,θ3为θ1从动的旋转角度,d0为o1到o2的距离,其中o1是{1}参考系的原点,o2是{2}参考系的原点;d1为上横臂的转动轴z1与下横臂的转动轴z3的垂距,d2为参考系{3}的原点到公垂线x2的距离;为{2}参考系的原点o2在整车参考系{v}下描述的位置向量;根据几何约束:
18、
19、构建式子(1):
20、f1(θ1,θ3)=0
21、s12.分别构建在整车参考系{v}下描述的j点位置向量vpj和e点的位置向量vpe的表达式:
22、vpj=[vpjx,vpjy(dj),vpjz]t
23、
24、其中,vpjx、vpjy(dj)、vpjz分别为j点在整车参考系{v}下描述的位置向量的x,y,z分量;dj为j点沿z5轴的主动位移,γ4为围绕z4轴的从动旋转角度;vr4(θ1,θ3)=[vx4,vy4,vz4]是从{4}到{v}的旋转矩阵,vx4,vy4,vz4为整车参考系{v}下描述的参考系{4}的x,y,z轴的单位矢量,{4}参考系为rssp转向机构中以o4为原点,其x轴平行于z4轴和z5轴的公垂线,其z轴平行于主销轴线的参考系;l4为转向机构铰点e到主销轴线的距离;vpq(θ1,θ3)=vpc+λq(vpb-vpc);λq表示q点到c点的距离与b点到c点的距离之比;根据几何约束关系:
25、
26、构建式子(2):
27、f2(θ1,θ3,dj,γ4)=0
28、s13.构建力系统方程:
29、
30、其中,和分别是{u1}相对于{u}的旋转矩阵和{s1}相对于{s}的旋转矩阵;{u1}参考系的原点位于b点,x轴平行于主销轴线,y轴平行于{s1}参考系的原点位于e点,x轴平行于主销轴线,y轴平行于{s}为转向铰点力传感器参考系;{u}为上铰点力传感器参考系;ufu为上铰点力传感器坐标系下获得的三轴力,sfs为转向铰点力传感器坐标系下获得的三轴力;为{u1}参考系描述下的上横臂铰点力,为{s1}参考系描述下的横拉杆铰点力;
31、第一步,构建γ5的表达式(3):
32、
33、其中,为{s1}参考系描述下的横拉杆铰点力的y轴分量;根据转向机构的运动学关系,γ5也可以表示为表达式(4):
34、
35、其中,vl5=vpj-vpe,vl4=vpe-vpq;
36、根据式子(3)和(4),构建式子(5):
37、f3(θ1,θ3,dj,γ4)=0;
38、第二步,创建{u2}参考系:原点位于a点,z轴平行于上横臂转轴z1,y轴平行于由于上摆臂能够绕转轴z1自由转动,即上铰点力的分力沿上摆臂平面法向量方向为零,可以得到式子(6):
39、
40、其中,分别为在{u2}系下描述的上铰点力在y、z轴的分量;为{u1}到{u2}的旋转矩阵;αu,βu以及γu分别为{u1}参考系到{u2}参考系,以内旋z-y-x方式旋转的三个欧拉角,表示为式子(7):
41、
42、其中,aij、bij与cij均为多项式拟合系数;表示上摆臂的摆动角度θ1的i-1次方,为j点沿z5轴的位移dj的j-1次方;
43、根据式子(6)的x轴分量和式子(7),得到式子(8):
44、f4(θ1,dj)=0
45、s14.联立式子(1)、(2)、(5)以及(8)求解,得到θ1、θ3、dj以及γ4,车轮相对于整车的方位角由如下式子(9)得到:
46、
47、其中,vrw为车轮参考系{w}到整车参考系{v}的旋转矩阵,{w}参考系原点位于接地点w,三轴与上铰点传感器参考系{u}的三轴平行,
48、
49、其中,×为叉乘运算符,vl1(θ1)=vpa-vpb,vl1(θ1)=vpa-vpb,vpa为{v}系描述下a点的位置矢量;
50、车轮的位置矢量vpw可以由如下式子得到:
51、vpw=vpb+vruupw=[vpwx,vpwy,vpwz]t
52、其中,vru由式子(9)得到,upw为在{u}系下描述的w点的位置矢量,vpwx,vpwy,vpwz分别为{v}系下描述的w点的位置矢量在x,y,z轴上的分量。
53、进一步,计算得到车轮力,具体包括:
54、建立在坐标系{w}下的牛顿-欧拉方程,假设车辆相对于{0}的线性加速度和角速度分别为和车轮中心相对于整车的驱动角速度在{w}下的表达为{v}从到{0}的旋转矩阵为0rv;其中,{0}是惯性系;根据牛顿方程,描述为:
55、
56、其中,mw表示车轮质量,wfu为车轮参考系{w}描述下的上横臂铰点力,wfs为车轮参考系{w}描述下的横拉杆铰点力;是车轮中心点g相对于{0}的加速度,通过以下方式得到:
57、
58、其中,表示0rw的转置;0rw=0rvvrw,表示{w}到{0}的旋转矩阵;vrw由式子(9)得到;是对应于的角加速度,upg为轮心g点在惯性系{0}下描述的位置向量,表示为:
59、
60、其中,upg为在{u}系下描述的g点的位置矢量;是车轮中心点g相对于车辆的速度,是对应于的加速度,wfg、wfl、wfw分别为{w}描述下的车轮重力、下铰点力以及车轮力,它们分别表示形式为:
61、
62、其中,g是重力加速度;
63、根据欧拉方程,以下横臂铰点c为取矩中心可描述为:
64、
65、其中,wm表示在{w}下描述的总力矩,表示角动量的求导并在{w}下描述;
66、
67、wpg、wpb、wpe、wpw分别为g,b,e,w点在{w}系描述下的位置向量;
68、进一步表示为:
69、
70、其中,wjw=[iw]3×3为车轮在{w}下描述的转动惯量;wjh=[ih]3×3为轮毂在{w}下描述的转动惯量;车轮相对于{w}的角速度表示为:
71、
72、其中,对应于的角加速度表示为:
73、
74、其中,是对应的角加速度;车轮中心驱动的角速度在{w}坐标系下的表示为:
75、
76、其对应的角加速度通过以下方式计算:
77、
78、其中,为对应于的角加速度;
79、为了计算车轮力vfw,我们利用式子(10)的x分量、式子(13)的y分量和z分量,组成三个方程,以标量形式表示为:
80、
81、其中,为的x轴分量,wfgx为{w}系描述下车轮重力的x轴分量,wfux为{w}系描述下的上横臂铰点力的x轴分量,wfsx为{w}系描述下的横拉杆铰点力的x轴分量,wflx为{w}系描述下的下横臂铰点力的x轴分量;wfwx、wfwy、wfwz分别为{w}系描述下的车轮力的x,y,z轴分量;分别为求导后的角动量的y,z轴分量;wmgy、wmgz分别为{w}系描述下的车轮重力对c点的力矩wmg的y,z轴分量;wmuy、wmuz分别为{w}系描述下的上横臂铰点力对c点的力矩wmu的y,z轴分量;wmsy、wmsz分别为{w}系描述下的横拉杆铰点力对c点的力矩wms的y,z轴分量;wpwx、wpwy、wpwz分别为w点在{w}系描述下的位置向量wpw的x,y,z轴分量;wpcx、wpcy、wpcz分别为c点在{w}系描述下的位置向量wpc的x,y,z轴分量;wflx是来自下铰点力传感器的x分量信号;车轮力vfw通过以下方式计算:
82、vfw=vrw[wfwx,wfwy,wfwz]t。
83、本发明的有益效果是:本发明公开的一种基于铰点力测量的车轮力感知系统及方法,利用上横臂铰点力始终沿着上横臂平面、转向拉杆铰点力始终沿着转向拉杆的轴向方向的特征,通过对双横臂悬挂rssr机构和转向rssp机构与车轮连接的球铰点力的三向分力测量,利用这些分力的比值关系,可计算出双横臂悬挂rssr机构和转向rssp机构与车轮的夹角,从而确定车轮跳动和转向的方向和位置;再通过建立车轮动态力/矩的平衡方程,可解算出车轮与路面作用的三维力,即车轮的纵向力、横向力和垂向力,从而实现车轮力位的同时并行感知。本发明既避免了加装额外的车轮方位的测量装置,又避免了在车轮轮辋上旋转部件上测量车轮力的传统方法所具有的信号和电源传输较难的问题,易于实现智能化汽车底盘产品嵌入式集成的车轮力感知,提高了测量效率以及检测精度,为车辆平顺性的评价和控制提供了技术支持。
- 还没有人留言评论。精彩留言会获得点赞!