一种车辆的全局路径规划方法、系统及车辆与流程
本发明涉及自动驾驶领域,特别是涉及一种车辆的全局路径规划方法、系统及车辆。
背景技术:
1、近年来,自动驾驶已经成为汽车行业的热门话题。许多企业如同雨后春笋般地在自动驾驶领域争夺领土,出现了“群雄割据”的局面。然而,l4级自动驾驶始终难以做到快速落地,资本逐渐失去了对l4级甚至更高级别的自动驾驶的耐心,开始流向低级别的(l2-l3级别)辅助驾驶。这方面的辅助驾驶主要是指涉及到高速高架以及城市快车道等相关场景的辅助驾驶。其中,比较典型的功能主要包括车道保持,车速保持,拨杆变道,自动进出匝道,自动调节车速,自动变道超车等功能。
2、不论是自动驾驶还是辅助驾驶,routing模块(全局路径规划)都是一个不可或缺的模块。routing模块旨在根据起点和终点搜索出一条可通行的路径,使汽车能够按照正确的方向前行,避免出现此路不通或者无法到达终点的情况。但是大部分的搜索算法面向的都是离散的状态或者节点,而地图信息则是连续的,如何在地图进行全局路径搜索也是自动驾驶面临的一个挑战。现有的routing方案中大都包含了两部分:离散化地图,建立图数据结构和搜索。其中,离散化地图,建立图数据结构是指对地图进行处理,将相关信息存储为图数据结构,保留相关的集合信息,并且加入节点之间的拓扑关系信息,以便搜索算法使用。搜索是指利用搜索算法找到一条从起点到终点的路径。
3、routing模块中建立图的方法各家方案千差万别,但万变不离其宗。都需要包含道路的拓扑结构信息与几何信息。其中拓扑信息包括可以根据当前节点,获取到当前节点(道路)的左邻近节点,右邻近节点,前继节点,后继节点等。几何信息包含了道路的中心线信息,道路的边线信息等。
4、routing模块中应用最广泛的搜索算法莫过于a*算法。a*算法是一个在计算机领域非常著名的图搜索算法,它最早出现在1968年斯坦福大学peter hart,nils nilsson和bertram raphael等人的论文《a formal basis for the heuristic determination ofminimum cost paths》中。a*算法可以看作是基于dijkstra算法加上启发式函数而来的算法,但a*算法具有更高的灵活性以及更强的目的性。a*算法可以像dijkstra算法一样,用于最短路径搜索。也可以像贪婪最佳优先搜索(greedy best-first search)一样一直朝着目标搜索。之所以拥有这样的优点,是因为a*算法的搜索花费(cost)包含两部分:g(n)和h(n)。其中,g(n)代表路径中从开始节点到节点n的实际花费,h(n)代表了从当前节点n到终点的启发式估计的花费。同时,a*算法还需要维护两个集合:开集(open set)和闭集(closeset)。其中,开集是用来存储当前还未被访问的节点,闭集里面则存放着已经被访问过的节点。结合节点的花费以及这两个集合,a*算法便可以搜索出从起点到终点需要经过的所有结点。
5、现有的routing方案层出不穷,以百度apollo开源平台中的routing方案最具有代表性。百度apollo开源平台是百度开源的自动驾驶方案平台,该平台主要面向高级别的自动驾驶。百度apollo开源平台主要面向的是高级别的自动驾驶任务,其涉及到的场景与功能也比辅助驾驶更多。apollo routing模块在设计上也显得更加复杂,但这种方案并不完美地适合于低级别的辅助驾驶,原因显然是因为成本和需求问题。
6、就成本方面而言,设计更加复杂,功能更加繁多的routing模块往往需要付出更多的算力代价。这样就会对汽车搭载的算力芯片造成更高的压力,选择算力更高的芯片则会意味着更高的成本。前文中已提到过,routing模块会给自动驾驶/辅助驾驶汽车提供“前进方向”,防止出现走错路,或者此路不通的情况。可以说,在保证汽车“前进方向”正确的前提下,routing模块并不是影响整个汽车自动驾驶/辅助驾驶性能的重要因素。因此,routing模块只需要提供正确的信息即可,并没有必要占用太多的算力。因此,设计一个算力要求更低的轻量化routing方案是有必要的。
7、在需求方面,当前辅助驾驶的场景主要是在高速场景,城市快车道,上下匝道等场景。在这种场景和辅助驾驶功能级别下,如果不是驾驶者主动采取变道行为,我们并不希望汽车频繁地发生变道行为或者频繁地提醒乘客拨杆变道。因为过于频繁地变道或者提醒会给乘客造成不好的辅助驾驶汽车驾驶、乘坐体验。但是,传统的routing模块并不会考虑到这一驾驶体验,所以不会对辅助驾驶汽车的变道次数做出限制。
8、总而言之,结合性价比(算法运行速度,算力要求和芯片成本)以及驾驶体验两方面因素的考虑,因此需要一种不仅能够保证辅助驾驶汽车场景需求,保证具备搜索出从起点到终点正确全局路径的能力,对算力要求较低,能够很好地控制成本,同时还可以给乘客提供良好的驾驶体验和乘坐体验的轻量化的方案。
技术实现思路
1、本发明的一个目的是要提供一种车辆的全局路径规划方法,以解决现有技术中,算力要求高,成本要求高且无法给乘客提供良好的驾驶体验和乘坐体验的问题。
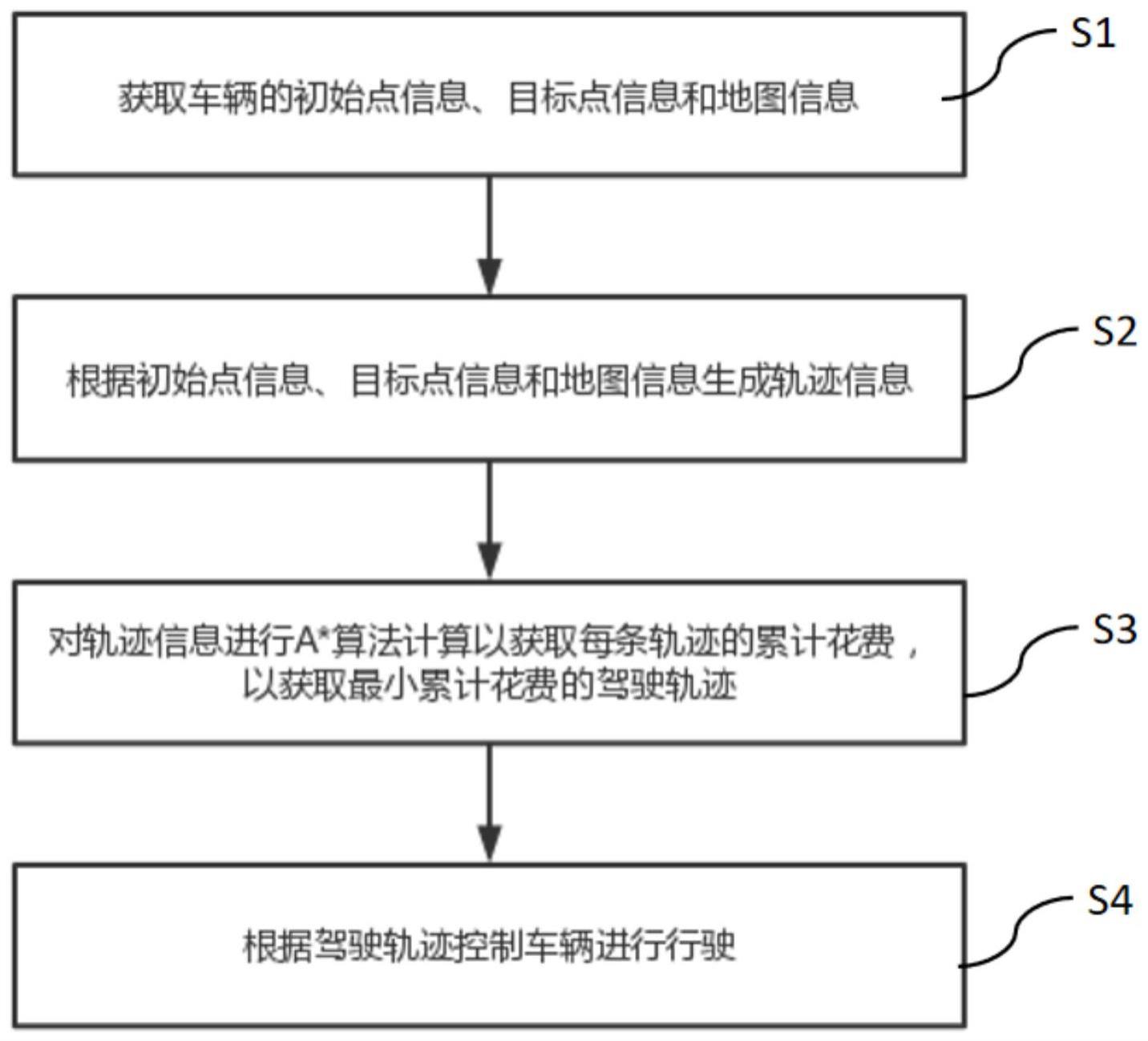
2、特别地,本发明提供了一种车辆的全局路径规划方法,包括:
3、获取车辆的初始点信息、目标点信息和地图信息;
4、根据所述初始点信息、所述目标点信息和所述地图信息生成轨迹信息;
5、对所述轨迹信息进行a*算法计算以获取每条轨迹的累计花费,以获取最小累计花费的驾驶轨迹;
6、根据所述驾驶轨迹控制车辆进行行驶。
7、进一步地,所述对所述轨迹信息进行a*算法计算以获取每条轨迹的累计花费,以获取最小累计花费的驾驶轨迹的步骤中包括:
8、获取起始初始点到目标点的节点;
9、计算每个所述节点的节点花费;
10、根据所述节点花费计算出最小节点花费的驾驶轨迹。
11、进一步地,所述计算每个所述节点的节点花费的步骤中还包括:
12、所述节点包括父节点和子节点,每个所述子节点都会被所述父节点所扩展并更新所述子节点的花费;
13、在所述子节点对应一个父节点时,其关系如下:
14、g(child)new=g(parent)+pathcost(parent,child)
15、其中,g(*)表示累计花费。
16、进一步地,所述子节点对应多个不同的所述父节点时,所述子节点累计花费只有在当前计算出的新累计花费更小的时候才更新,其关系如下:
17、g(child)=g(child)new,if g(child)new<g(child);
18、g(child)=g(child),if g(child)new≥g(child)。
19、进一步地,所述父节点到所述子节点的扩展花费为两个所述节点的长度花费和变道花费,并根据所述变道花费来惩罚变道行为;
20、其关系如下:
21、pathcost(parent,child)=costlength+costlanechange;
22、其中,costlength为节点长度花费,costlanechange为变道花费。
23、进一步地,还包括启发花费,所述启发花费为子节点到所述目标点的距离花费,所述距离花费为:
24、h(child)=fun(distancechild-destination)
25、其中,h(child)为子节点的启发花费。
26、本发明还公开了一种车辆的全局路径规划系统,包括控制装置,所述控制装置包括存储器和处理器,所述存储器内存储有控制程序,所述控制程序被所述处理器执行时用于实现上述所述的车辆的全局路径规划方法。
27、本发明还公开了一种车辆,所述车辆具有上述所述的全局路径规划系统。
28、本发明通过对于车道级别的最小变道次数的路径导航,主要是指在设计a*算法花费时,加入了对变道行为的惩罚,如果当前扩展节点的下一节点需要发生变道,则在计算当前节点的花费值时还需要另外再加上一个关于变道的惩罚花费,从而能够有效降低算力成本,且由于减少轨迹规划的次数,从而提升了乘客的驾驶体验和乘坐体验。
29、根据下文结合附图对本发明具体实施例的详细描述,本领域技术人员将会更加明了本发明的上述以及其他目的、优点和特征。
- 还没有人留言评论。精彩留言会获得点赞!