室内室外动态定位方法及系统与流程
本发明属于定位,具体涉及一种室内室外动态定位方法及系统。
背景技术:
1、随着经济技术的发展和人们生活水平的提高,电能已经成为了人们生产和生活中必不可少的二次能源,给人们的生产和生活带来了无尽的便利。因此,保障电能的稳定可靠供应,就成为了电力系统最重要的任务之一。
2、为了保障电力系统作业人员的安全,电力系统作业人员一般都随身佩戴实时定位装置;该装置在室外时通过北斗定位系统进行实时定位,而在室内时则通过室内的定位基站,采用超宽带载波技术进行实时定位。通过实时获取作业人员的位置信息,电力系统能够尽可能的保证作业人员的安全,同时对作业人员进入危险区域等行为进行及时的预警。
3、但是,目前的电力系统作业人员的定位过程,依旧存在一个很重要的问题,即室内/室外定位问题。当作业人员处于室内/室外的交界处时,此时定位系统往往会在两种定位方式之间频繁切换或者定位切换较慢,这种情况将导致定位过程的精度和可靠性均较差,而且会带来进一步的安全隐患。
技术实现思路
1、本发明的目的之一在于提供一种可靠性高且精确较高的室内室外动态定位方法。
2、本发明的目的之二在于提供一种实现所述室内室外动态定位方法的系统。
3、本发明提供的这种室内室外动态定位方法,包括如下步骤:
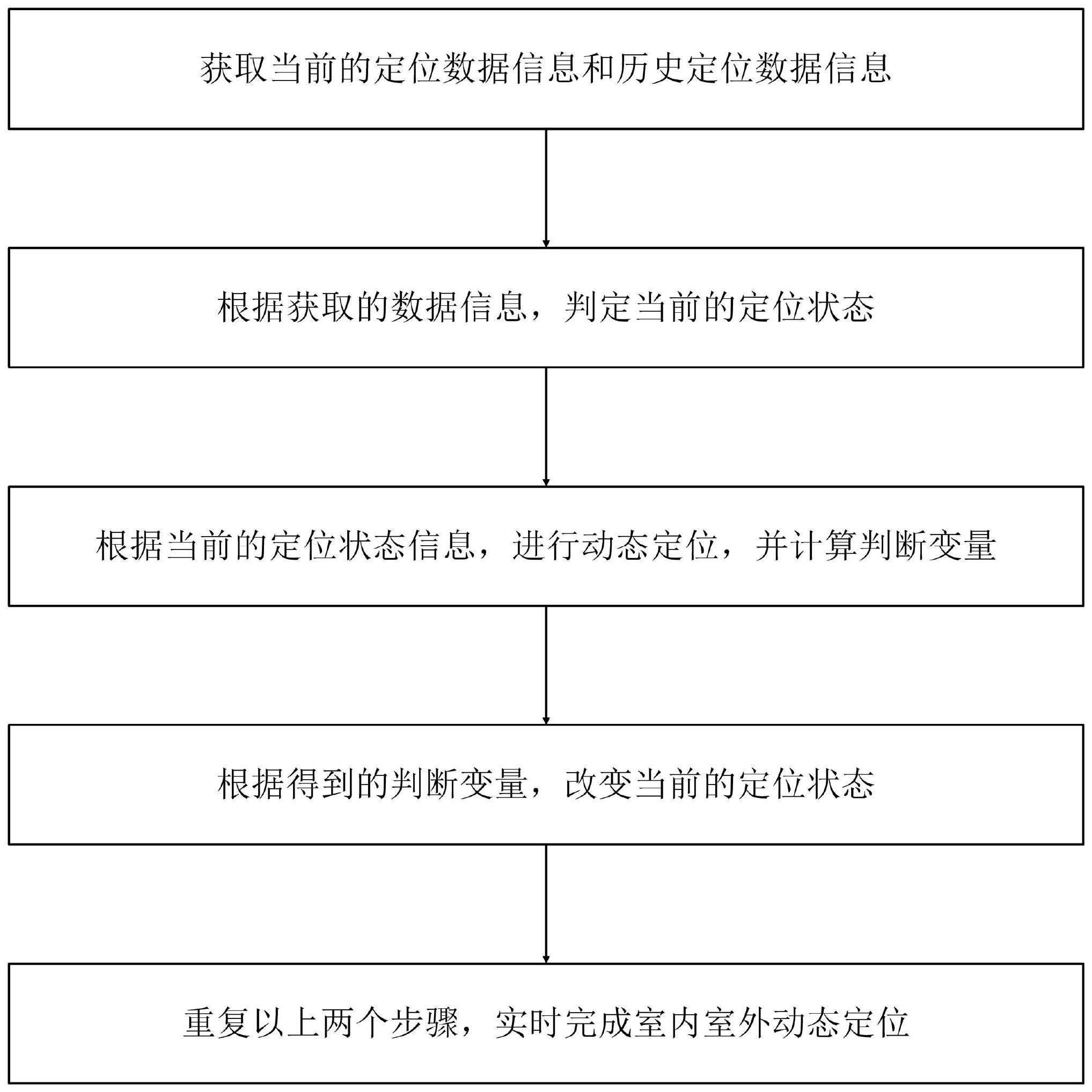
4、s1.获取当前的定位数据信息和历史定位数据信息;
5、s2.根据步骤s1获取的数据信息,判定当前的定位状态;所述的状态包括室外定位状态、室内定位状态、室外往室内过渡状态和室内往室外过渡状态;
6、s3.根据当前的定位状态信息,进行动态定位:
7、若定位状态为室外定位状态,则进行北斗定位,并计算北斗定位状态判断变量;
8、若定位状态为室内定位状态,则进行超宽带载波定位,并计算超宽带载波定位状态判断变量;
9、若定位状态为室外往室内过渡状态,则进行北斗定位,并计算第一过渡状态判断变量;
10、若定位状态为室内往室外过渡状态,则进行超宽带载波定位,并计算第二过渡状态判断变量;
11、s4.根据步骤s3得到的判断变量,改变当前的定位状态;
12、s5.重复步骤s3~s4,实时完成室内室外动态定位。
13、步骤s2所述的根据步骤s1获取的数据信息,判定当前的定位状态;所述的状态包括室外定位状态、室内定位状态、室外往室内过渡状态和室内往室外过渡状态,具体包括如下步骤:
14、若最近一次定位的位置为室外且当前无法接收到能够用于定位的若干个室内定位基站的定位信息,则判定当前的定位状态为室外定位状态;
15、若最近一次定位的位置为室内且当前无法接收到能够用于定位的若干颗北斗定位卫星的定位信息,则判定当前的定位状态为室内定位状态;
16、若最近一次定位的位置为室外且当前能够接收到能够用于定位的若干个室内定位基站的定位信息,则判定当前的定位状态为室外往室内过渡状态;
17、若最近一次定位的位置为室内且当前能够接收到能够用于定位的若干颗北斗定位卫星的定位信息,则判定当前的定位状态为室内往室外过渡状态。
18、步骤s3所述的若定位状态为室外定位状态,则进行北斗定位,并计算北斗定位状态判断变量,具体包括如下步骤:
19、设定当前时刻为t1;能够观测到n个北斗定位卫星的坐标为(xa1,ya1,za1)~(xan,yan,zan);
20、根据观测到的坐标,计算得到当前的定位位置为(xt1,yt1,zt1);
21、采用如下算式计算得到第一定位矩阵h:
22、
23、式中为第一中间变量且为第二中间变量且为第二中间变量且
24、采用如下算式计算得到当前时刻的第一几何精度因子gdop:
25、
26、式中trace()为矩阵的迹;
27、采用如下算式计算得到北斗定位状态判断变量a1:
28、
29、式中n为当前时刻能够观察到的北斗定位卫星的数量。
30、步骤s3所述的若定位状态为室内定位状态,则进行超宽带载波定位,并计算超宽带载波定位状态判断变量,具体包括如下步骤:
31、将上一时刻的定位结果坐标(xt3,yt3,zt3)作为初始定位坐标;能够观测到k个室内基站的坐标为(xb1,yb1,zb1)~(xbk,ybk,zbk);
32、计算得到初始定位坐标与第k个室内基站的几何距离为
33、采用如下算式计算得到第二定位矩阵j为
34、计算得到定位坐标更新值(δx,δy,δz)为式中dk为初始定位坐标与第k个室内基站的距离观测值;
35、将k个室内基站的坐标依次代入第二定位矩阵j的计算公式,并计算定位坐标更新值(δx,δy,δz),直至相邻两次计算得到的定位坐标更新值的差值在设定范围内,得到最终的定位坐标更新值;
36、采用得到的最终的定位坐标更新值,对初始定位坐标进行更新,完成超宽带载波定位;
37、采用如下算式计算得到第一距离因子d:
38、
39、式中表示从到中的第i小的值;
40、采用如下算式计算得到超宽带载波定位状态判断变量a2为
41、步骤s3所述的若定位状态为室外往室内过渡状态,则进行北斗定位,并计算第一过渡状态判断变量,具体包括如下步骤:
42、设定当前时刻为t2;能够观测到n个北斗定位卫星的坐标为(xa1,ya1,za1)~(xan,yan,zan);
43、根据观测到的坐标,计算得到当前的定位位置为(xt2,yt2,zt2);
44、采用如下算式计算得到第三定位矩阵h':
45、
46、式中为第四中间变量且为第五中间变量且为第六中间变量且
47、采用如下算式计算得到当前时刻的第二几何精度因子gdop':
48、
49、式中trace()为矩阵的迹;
50、采用如下算式计算得到第一北斗定位状态中间判断变量a1'为
51、此刻,能够观测到k个室内基站的坐标为(xb1,yb1,zb1)~(xbk,ybk,zbk);
52、采用如下算式计算得到第二距离因子d':
53、
54、式中表示从到中的第i小的值;为当前的定位坐标与第k个室内基站的几何距离,且
55、采用如下算式计算得到第一超宽带载波定位状态中间判断变量a2'为
56、最后,计算得到第一过渡状态判断变量a为a=a1'-a2'。
57、步骤s3所述的若定位状态为室内往室外过渡状态,则进行超宽带载波定位,并计算第二过渡状态判断变量,具体包括如下步骤:
58、将上一时刻的定位结果坐标(xt4,yt4,zt4)作为初始定位坐标;能够观测到k个室内基站的坐标为(xb1,yb1,zb1)~(xbk,ybk,zbk);
59、计算得到初始定位坐标与第k个室内基站的几何距离为
60、采用如下算式计算得到第四定位矩阵m为
61、
62、计算得到定位坐标更新值(δx',δy',δz')为式中d'k为初始定位坐标与第k个室内基站的距离观测值;
63、将k个室内基站的坐标依次代入第四定位矩阵m的计算公式,并计算定位坐标更新值(δx',δy',δz'),直至相邻两次计算得到的定位坐标更新值的差值在设定范围内,得到最终的定位坐标更新值;
64、采用得到的最终的定位坐标更新值,对初始定位坐标进行更新,完成超宽带载波定位;
65、采用如下算式计算得到第三距离因子d”:
66、
67、式中表示从到中的第i小的值;
68、采用如下算式计算得到第二超宽带载波定位状态中间判断变量a2”为
69、此刻,能够观测到n个北斗定位卫星的坐标为(xa1,ya1,za1)~(xan,yan,zan);
70、采用如下算式计算得到第五定位矩阵p:
71、
72、式中为第七中间变量且为第八中间变量且为第九中间变量且
73、采用如下算式计算得到当前时刻的第三几何精度因子gdop”:
74、
75、式中trace()为矩阵的迹;
76、采用如下算式计算得到第一北斗定位状态中间判断变量a1”为
77、最后,计算得到第二过渡状态判断变量a'为a'=a1”-a2”。
78、步骤s4所述的根据步骤s3得到的判断变量,改变当前的定位状态,具体包括如下步骤:
79、若当前为室外定位状态,则对北斗定位状态判断变量a1进行判断:
80、若a1<0,则将当前的定位状态修改为室外往室内过渡状态;
81、若a1≥0,则保持当前状态;
82、若当前为室内定位状态,则对超宽带载波定位状态判断变量a2进行判断:
83、若a2<0,则将当前的定位状态修改为室内往室外过渡状态;
84、若a2≥0,则保持当前状态;
85、若当前为室外往室内过渡状态,则对第一过渡状态判断变量a进行判断:
86、若|a|<1,则将当前的定位状态保持为室外往室内过渡状态;
87、若a≥1,则将当前的定位状态修改为室外定位状态;
88、若a≤-1,则将当前的定位状态保持为室内往室外过渡状态;
89、若当前为室内往室外过渡状态,则对第二过渡状态判断变量a'进行判断:
90、若|a'|<1,则将当前的定位状态保持为室内往室外过渡状态;
91、若a'≥1,则将当前的定位状态修改为室外往室内过渡状态;
92、若a'≤-1,则将当前的定位状态修改为室内定位状态。
93、本发明还提供了一种实现所述室内室外动态定位方法的系统,包括数据获取模块、定位状态判断模块、动态定位模块、定位状态修正模块和循环模块;数据获取模块、定位状态判断模块、动态定位模块、定位状态修正模块依次串联,循环模块的输入端连接定位状态修正模块,循环模块的输出端连接动态定位模块;数据获取模块用于获取当前的定位数据信息和历史定位数据信息,并将数据上传定位状态判断模块;定位状态判断模块用于根据接收到的数据,判定当前的定位状态,并将数据上传动态定位模块;动态定位模块用于根据接收到的数据,根据当前的定位状态信息,进行动态定位,计算对应的判断变量,并将数据上传定位状态修正模块;定位状态修正模块用于根据接收到的数据,改变当前的定位状态,并将数据上传循环模块;循环模块用于根据接收到的数据,控制动态定位模块和定位状态修正模块循环工作,实时完成动态定位。
94、本发明提供的这种室内室外动态定位方法及系统,建立了定位模式和卫星定位质量之间的联系,通过判断实时定位质量和定位状态对定位模式进行灵活的切换;因此本发明不仅能够完成实时定位,而且能够更高效的完成定位模式的动态切换,有效避免定位质量严重下降,同时避免频繁切换定位模式造成的功耗,减少定位不稳定带来的不利影响,进一步提高定位的精确性和可靠性。
- 还没有人留言评论。精彩留言会获得点赞!