地面坑体土方量检测方法与流程
本发明涉及土木测量的,特别涉及地面坑体土方量检测方法。
背景技术:
1、目前,铁路、公路和大型建筑工程土方量的测量通常都是采用gps或全站仪进行打点测量地面横断面,以测量的地面横断面为基准,计算得到土方量大小。上述土方量测量方式存在作业时间长,计算过程复杂,容易出现纰漏的问题,并且在地形复杂区域,测量人员无法进行站立打点,只能根据经验进行目测估计,导致测量误差非常大。此外,还可采用三维激光雷达进行土木测量,但是三维激光雷达设备的测量成本较高,无法在不同土木工程场合进行广泛、低成本、便捷和高精度的土方量测量。
技术实现思路
1、针对现有技术存在的缺陷,本发明提供了一种地面坑体土方量检测方法,对地面坑体进行三维激光扫描,得到地面坑体的三维点云数据,并生成有效三维点云数据,利用三维激光扫描设备直接对地面坑体进行三维激光扫描测量,得到地面坑体的三维点云数据,实现对地面坑体的低成本全面的测量,对地面坑体的三维形状尺寸进行精确的标定;还将有效三维点云数据划分为若干三维点云数据子集合,并生成匹配的三维点云子空间,再拼接形成与地面坑体匹配的三维点云空间,以此构建地面坑体的三维空间模型,对地面坑体进行全面三维表征;并基于三维空间模型,确定地面坑体的土方量计算范围,以此得到地面坑体的土方量结果,降低地面坑体土方量检测的成本和提高检测便捷性与精确性。
2、本发明提供的地面坑体土方量检测方法,其包括如下步骤:
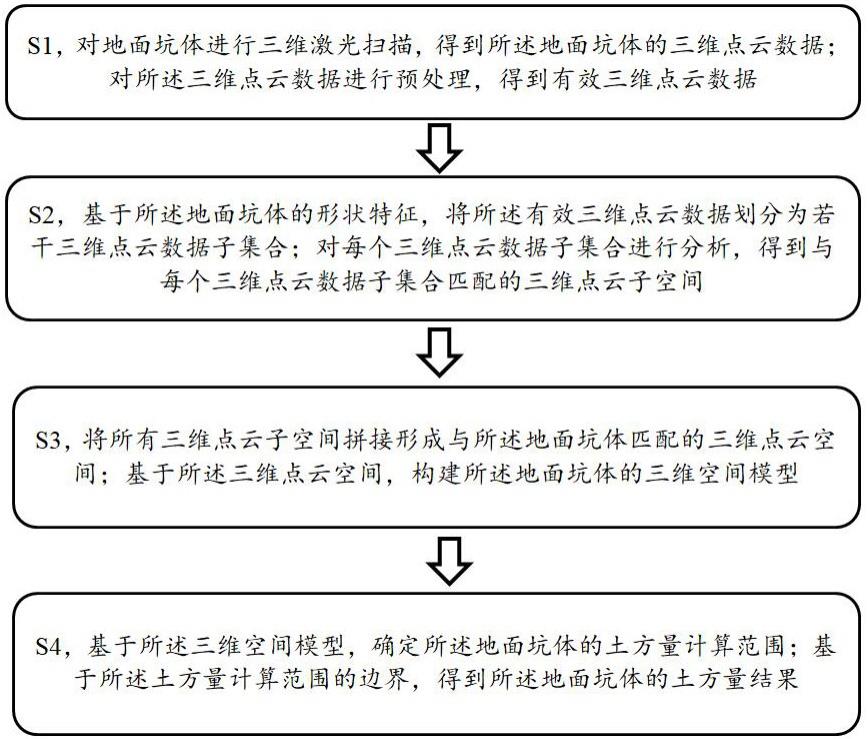
3、步骤s1,对地面坑体进行三维激光扫描,得到所述地面坑体的三维点云数据;对所述三维点云数据进行预处理,得到有效三维点云数据;
4、步骤s2,基于所述地面坑体的形状特征,将所述有效三维点云数据划分为若干三维点云数据子集合;对每个三维点云数据子集合进行分析,得到与每个三维点云数据子集合匹配的三维点云子空间;
5、步骤s3,将所有三维点云子空间拼接形成与所述地面坑体匹配的三维点云空间;基于所述三维点云空间,构建所述地面坑体的三维空间模型;
6、步骤s4,基于所述三维空间模型,确定所述地面坑体的土方量计算范围;基于所述土方量计算范围的边界,得到所述地面坑体的土方量结果。
7、在本技术公开的一个实施例中,在所述步骤s1之前,包括;
8、获取所述地面坑体对应的海拔高度分布信息,基于所述海拔高度分布信息,从所述地面坑体所在地面区域选定若干三维激光扫描工作点;其中,所有三维激光扫描工作点具有相同的海拔高度;
9、获取所有三维激光扫描工作点各自的位置坐标信息,基于所述位置坐标信息,确定所有三维激光扫描工作点相互之间的相对位置关系。
10、在本技术公开的一个实施例中,在所述步骤s1中,对地面坑体进行三维激光扫描,得到所述地面坑体的三维点云数据;对所述三维点云数据进行预处理,得到有效三维点云数据,包括:
11、基于所述相对位置关系,确定每个三维激光扫描工作点上设置的三维激光扫描设备对所述地面坑体进行三维激光扫描的扫描区域;
12、基于所述扫描区域的边界位置信息,指示其对应的三维激光扫描设备在相应的三维空间角度范围内对所述扫描区域进行三维激光扫描,从而得到所述扫描区域的三维点云数据;
13、对所述地面坑体的所有扫描区域各自对应的三维点云数据进行卡尔曼滤波预处理;再将经过所述卡尔曼滤波预处理的三维点云数据组成有效三维点云数据。
14、在本技术公开的一个实施例中,在所述步骤s1中,基于所述扫描区域的边界位置信息,指示其对应的三维激光扫描设备在相应的三维空间角度范围内对所述扫描区域进行三维激光扫描,包括:
15、基于所述扫描区域的边界位置信息,所述三维激光扫描设备所在三维激光扫描工作点的位置坐标信息以及所述三维激光扫描设备包含的激光测距仪的激光发射源相对于地面的高度信息,得到所述三维激光扫描设备对所述扫描区域进行全区域化的激光扫描操作过程中激光在三维空间形成的三维空间角度范围;
16、基于所述三维空间角度范围,调整所述三维激光扫描设备包含的水平旋转台和扫描振镜的工作状态;其中,调整所述水平旋转台的工作状态包括调整所述水平旋转台的水平旋转角度;调整所述扫描振镜的工作状态包括调整所述扫描振镜对来自所述激光发射源的激光束的二维反射偏转角度。
17、在本技术公开的一个实施例中,在所述步骤s2中,基于所述地面坑体的形状特征,将所述有效三维点云数据划分为若干三维点云数据子集合,包括:
18、对所述地面坑体进行双目拍摄,得到所述地面坑体的双目影像;基于所述双目影像的双目视差,得到所述地面坑体的三维影像;
19、对所述三维影像进行分析,得到所述地面坑体的边界面形状、尺寸和位置朝向特征;
20、基于所述边界面形状、尺寸和位置朝向特征,将所述地面坑体划分为若干坑体子区域,并将位于同一坑体子区域的所有有效三维点云数据整合成三维点云数据子集合,从而得到与若干坑体子区域一一对应的若干三维点云数据子集合。
21、在本技术公开的一个实施例中,在所述步骤s2中,对每个三维点云数据子集合进行分析,得到与每个三维点云数据子集合匹配的三维点云子空间,包括:
22、对每个三维点云数据子集合进行点云识别处理,得到处于所述三维点云数据子集合对应的坑体子区域的所有区域边界面上的三维点云数据;
23、基于所述点云识别处理得到的三维点云数据,构建与所述三维点云数据子集合匹配的三维点云子空间。
24、在本技术公开的一个实施例中,在所述步骤s3中,将所有三维点云子空间拼接形成与所述地面坑体匹配的三维点云空间,包括:
25、基于所述地面坑体包含的所有坑体子区域相互之间的相对位置关系,将所有坑体子区域各自对应的三维点云子空间拼接形成与所述地面坑体整体匹配的三维点云空间。
26、在本技术公开的一个实施例中,在所述步骤s3中,基于所述三维点云空间,构建所述地面坑体的三维空间模型,包括:
27、当存在地面坑体的施工基准面时,基于所述施工基准面,对所述三维点云空间进行点云整合,从而构建得到所述地面坑体的三维空间模型;
28、当不存在地面坑体的施工基准面时,将地面坑体施工前后的三维点云空间进行对比,从而构建得到所述地面坑体的三维空间模型。
29、在本技术公开的一个实施例中,在所述步骤s4中,基于所述三维空间模型,确定所述地面坑体的土方量计算范围,包括:
30、对所述三维空间模型进行三维空间外表面拟合处理,得到所述三维空间模型的三维空间外表面围蔽形成的三维空间范围,以此作为所述地面坑体的土方量计算范围。
31、在本技术公开的一个实施例中,在所述步骤s4中,基于所述土方量计算范围的边界,得到所述地面坑体的土方量结果,包括:
32、以所述土方量计算范围的边界为基准,对所述土方量计算范围进行三维空间体积积分计算,得到所述地面坑体的土方量值。
33、相比于现有技术,该地面坑体土方量检测方法对地面坑体进行三维激光扫描,得到地面坑体的三维点云数据,并生成有效三维点云数据,利用三维激光扫描设备直接对地面坑体进行三维激光扫描测量,得到地面坑体的三维点云数据,实现对地面坑体的低成本全面的测量,对地面坑体的三维形状尺寸进行精确的标定;还将有效三维点云数据划分为若干三维点云数据子集合,并生成匹配的三维点云子空间,再拼接形成与地面坑体匹配的三维点云空间,以此构建地面坑体的三维空间模型,对地面坑体进行全面三维表征;并基于三维空间模型,确定地面坑体的土方量计算范围,以此得到地面坑体的土方量结果,降低地面坑体土方量检测的成本和提高检测便捷性与精确性。
34、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
35、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!