速率积分半球谐振陀螺角速率输出方法
本发明属于惯性。
背景技术:
1、半球谐振陀螺是一种新型的惯性传感器,其工作原理基于柯式效应,能够实现角速率或角位置的精确测量。力平衡半球谐振陀螺的相关技术比较成熟,在这种工作模式下,谐振子驻波通过速率控制回路被控制在固定位置,控制力的大小反应陀螺敏感到的角速率输入,但受限于控制力的大小,力平衡半球谐振陀螺的测量范围受到了明显限制。速率积分半球谐振陀螺是半球谐振陀螺领域的研究热点,其与技术较为成熟的力平衡半球谐振陀螺相比,具备更大的角速率测量范围,同时,其结构及控制方法也更为简单,随着相关技术的发展,速率积分半球谐振陀螺的精度也在不断提高,也因此获得了更多的应用。现有速率积分半球谐振陀螺的控制方案主要由幅度控制回路、正交控制回路及频率控制回路组成,上述三个控制回路分别实现半球谐振子的振动能量补充、频差抑制及频率跟踪,相比与力平衡半球谐振陀螺,缺少了速率控制回路使得速率积分半球谐振陀螺中振子驻波处于自由进动状态,从而获得了更大的角速率测量范围。
2、根据速率积分半球谐振陀螺控制方案的具体实施方法的不同,陀螺角速率输出方案也并不相同,目前常见的控制方法中以振子驻波为控制对象,在这种实施方案中,通过控制环路维持谐振子驻波幅度抑制正交波幅度,并通过检测电极计算得到振子驻波方位角,进一步通过时间差分得到陀螺角速率输出,这种方法由于时间差分导致驻波方位角的测量噪声被进一步放大,影响陀螺的输出精度。
技术实现思路
1、本发明是为了解决现有速率积分半球谐振陀螺控制方法存在驻波方位角的测量噪声大,陀螺的输出精度差的问题,现提供一种速率积分半球谐振陀螺角速率输出方法。
2、本发明所述速率积分半球谐振陀螺角速率输出控制方法,包括:
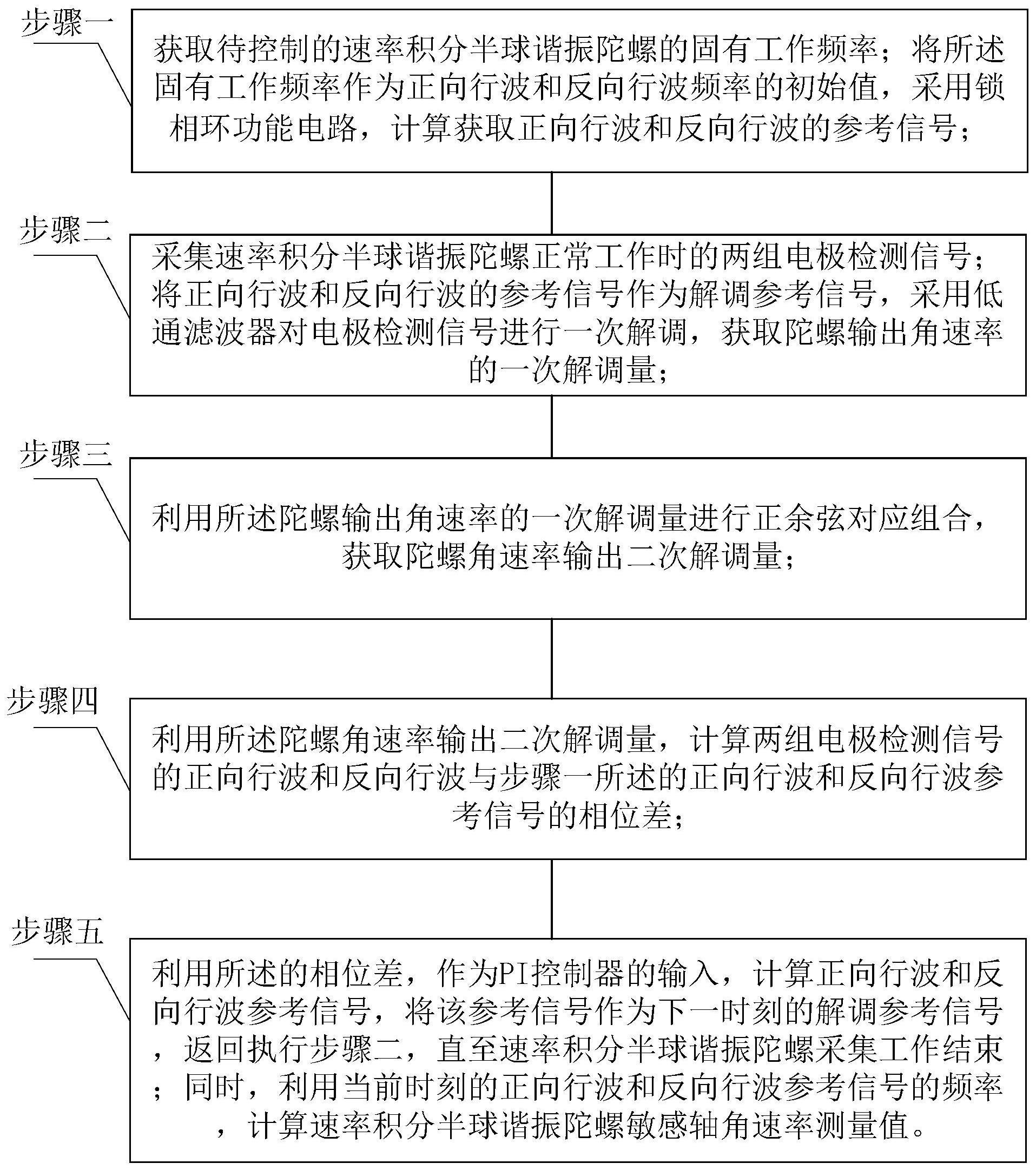
3、步骤一、获取待控制的速率积分半球谐振陀螺的固有工作频率;将所述固有工作频率作为正向行波和反向行波频率的初始值,采用锁相环功能电路,计算获取正向行波和反向行波的参考信号;
4、步骤二、采集速率积分半球谐振陀螺正常工作时的两组电极检测信号;将正向行波和反向行波的参考信号作为解调参考信号,采用低通滤波器对电极检测信号进行一次解调,获取陀螺输出角速率的一次解调量;
5、步骤三、利用所述陀螺输出角速率的一次解调量进行正余弦对应组合,获取陀螺角速率输出二次解调量;
6、步骤四、利用所述陀螺角速率输出二次解调量,计算两组电极检测信号的正向行波和反向行波与步骤一所述的正向行波和反向行波参考信号的相位差;
7、步骤五、将所述的相位差,作为pi控制器的输入,计算当前正向行波和反向行波参考信号,将该参考信号作为下一时刻的解调参考信号,返回执行步骤二,直至速率积分半球谐振陀螺采集工作结束;同时,利用当前时刻的正向行波和反向行波参考信号的频率,计算速率积分半球谐振陀螺敏感轴角速率测量值ω′。
8、进一步地,本发明中,步骤一中,正向行波和反向行波的参考信号为:
9、
10、
11、其中,pc,ps,nc,ns分别为正向行波余弦参考信号、正向行波正弦参考信号、反向行波余弦参考信号和反向行波正弦参考信号;ω′p,ωn′分别为数字控制器锁相环生成的正向行波及反向行波的频率,为锁相环生成的参考信号的相位,ω′p,ωn′的初值均为ω0。
12、进一步地,本发明中,步骤二中,采集的速率积分半球谐振陀螺正常工作时的两组电极检测信号为:
13、
14、其中,ux和uy为速率积分半球谐振陀螺正常工作时的两组电极检测信号,g为检测电路信号增益,a为半球谐振子振动幅度,k为半球谐振陀螺进动因子,ω为半球谐振陀螺敏感轴输入角速率,t为陀螺工作时间,θ0为半球谐振子初始驻波方位角,ω0为半球谐振陀螺固有振动频率,为半球谐振陀螺初始时间相位。
15、进一步地,本发明中,步骤二中,采用低通滤波器对电极检测信号进行一次解调,获取的陀螺输出角速率的一次解调量为:
16、
17、
18、其中,
19、
20、其中,ux_pc,ux_ps,ux_nc,ux_ns,uy_pc,uy_ps,uy_nc,uy_ns分别为速率积分半球谐振陀螺正常工作时的两组电极检测信号正向行波的正弦、余弦一次解调量和反向行波余弦一次解调量。
21、进一步地,本发明中,步骤三中,利用所述陀螺输出角速率的一次解调量进行正余弦对应组合,获取的陀螺角速率输出二次解调量为:
22、
23、h为速率积分半球谐振陀螺正常工作时的两组电极检测信号正向行波的正弦、余弦一次解调量的和,i为速率积分半球谐振陀螺正常工作时的两组电极检测信号正向行波的正弦、余弦一次解调量的差,j为速率积分半球谐振陀螺正常工作时的两组电极检测信号反向行波的余弦、正弦一次解调量的差,k为速率积分半球谐振陀螺正常工作时的两组电极检测信号反向行波的正弦、余弦一次解调量的和。
24、进一步地,本发明中,步骤四中,计算两组电极检测信号的正向行波和反向行波与正向行波和反向行波参考信号的相位差为:
25、
26、分别为两组电极检测信号的正向行波和反向行波与正向行波和反向行波参考信号的相位差。
27、进一步地,本发明中,步骤五中,利用所述的相位差计算当前时刻正向行波和反向行波参考信号的方法为:
28、将两组电极检测信号的正向行波和反向行波与正向行波和反向行波参考信号的相位差作为p-i控制器的输入,获取正反向行波参考信号的频率,利用所述参考信号的频率,将所述参考信号的频率作为信号生成器的输入,获得当前时刻正向行波和反向行波参考信号。
29、进一步地,本发明中,步骤五中,当前时刻的正向行波和反向行波参考信号的频率为:
30、
31、其中,kp为pi控制器的比例环节增益,ki为pi控制器的积分环节增益,i表示时刻,m=0,1,2,...,i。
32、进一步地,本发明中,步骤五中,计算的速率积分半球谐振陀螺敏感轴角速率测量值ω′为:
33、
34、本技术提出的速率积分半球谐振陀螺角速率输出方法,通过将半球谐振子驻波等效为幅度相同方向相反的一组正向行波和反向行波,利用数字控制电路实现锁相环功能,完成正反向行波的频率跟踪,并通过正反向行波的频率差计算得到速率积分半球谐振陀螺敏感轴角速率输入的测量值,即陀螺的角速率输出,通过该方法可有效抑制陀螺输出噪声,提高陀螺输出精度。
35、本技术能够有效解决原有速率积分半球谐振陀螺角速率输出方案下,需先通过电极检测信号计算得到半球谐振子驻波方位角,再通过差分计算得到角速率导致的角速率输出噪声偏大以及复杂计算导致的计算精度下降的问题,通过本技术,简化了速率积分半球谐振陀螺角速率输出计算复杂度,提升了陀螺的角速率输出精度,进一步,陀螺的零偏稳定性及标度因数线性度也将提升,并最终达到提高速率积分半球谐振陀螺整体性能的目的,为陀螺的广泛应用提供有力支撑。
- 还没有人留言评论。精彩留言会获得点赞!