一种基于边缘计算的缓滩水位监测系统及方法与流程
本发明涉及一种基于边缘计算的缓滩水位监测系统及方法,属于缓滩水位监测。
背景技术:
1、水位是水资源调控、堤坝安全预警以及运行、水文预报的关键要素,是水文、水资源、水工程以及水环境监测的必测物理量。目前陡峭甚至竖直岸坡的水位监测可以通过雷达或超声波等反射式水位计、浮子式水位计以及压力式水位计实现自动监测,在静水条件下能获得比较高的精度,但在风浪作用下目前还存在一定的问题。由于我国存在大量的湖泊、宽浅河道以及水库等,由于淤积等原因导致岸滩平缓,上述常用水位监测方法均难以满足现场应用场景要求,具体原因分析如下:(1)雷达、超声波等反射式水位计需要设置悬臂梁等使得传感器垂直水面,由于缓滩距离长从而导致传感器安装悬臂梁长度过长甚至不可能加工;(2)浮子式水位计需要修建水位井和引水管道或渠道,在淤积严重的缓滩长久性难以保证;(3)压力式水位计需要将仪器设置于最低水位以下,线缆长度过长且易受破坏。(4)目前最新的视频水位监测方法,主要有两种水位监测的实现途径。一种是基于水尺的,另外一种是基于无水尺的,前者对于缓滩水尺设置不便或影响不好,后者存在几何校正、光学畸变、风浪及雾气影响等突出因素从而影响测量精确度甚至根本无法测量。而且无论是哪种视频水位监测方法,对于风浪的影响都未考虑或考虑不周。
技术实现思路
1、本发明所要解决的技术问题:在缓滩水位监测过程中,现场实际应用场景中风浪爬高及动态涨落等影响水面高程,从而影响测量精确度甚至根本无法测量。
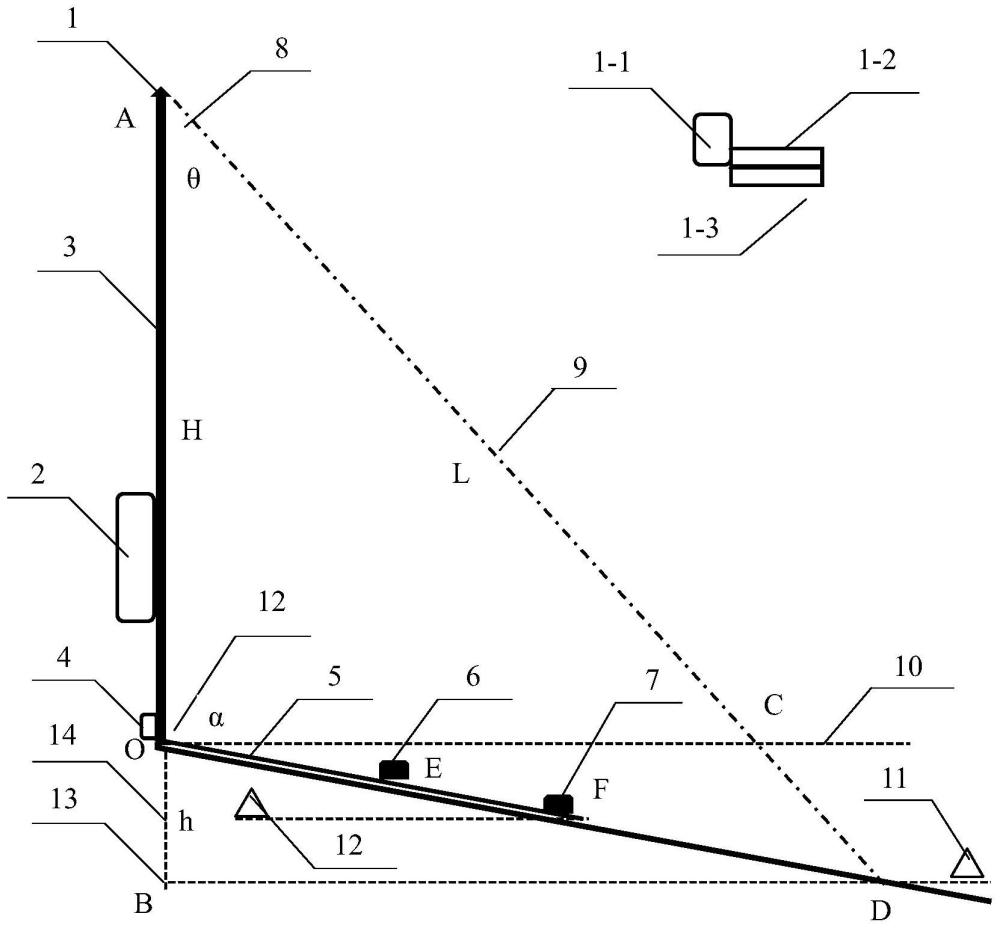
2、为解决上述技术问题,本发明提供一种基于边缘计算的缓滩水位监测系统,沿滩涂敷设有不锈钢基准条板5,所述不锈钢基准条板5的一个端点为原点o;全反射棱镜一6和全反射棱镜二7固定在不锈钢基准条板5上;全反射棱镜一6所在位置为e点,e点位于of中间位置,安装于最高水位线以上,全反射棱镜二7所在位置为f点,f点高于最高水位线的设定高度;
3、不锈钢立杆3安装于原点o,不锈钢立杆3的顶点为a点;
4、边缘计算装置分别与测量装置、激光测距仪连接,对接收到的数据进行处理,得到水位高程数据;
5、所述激光测距仪4安装于不锈钢立杆底部o点,用于测量ao、oe和of长度;
6、测量装置1安装于立杆顶部a点,所述测量装置1包括各气象传感器1-1、全站仪1-2和高清视频摄像机1-3。
7、前述的一种基于边缘计算的缓滩水位监测系统,所述边缘计算装置2将水位高程数据通过4g/5g、蓝牙和usb通信接口输出。
8、前述的一种基于边缘计算的缓滩水位监测系统,所述全站仪1-2通过全站仪自带的伺服控制装置实现对准波浪涨落区水位与岸边交线;所述高清视频摄像机1-3为同轴长焦高清视频摄像机。
9、一种基于边缘计算的缓滩水位监测方法,包括以下步骤:
10、步骤s1,设定水位测量精度,水位测量精度用符号s表示;
11、步骤s2,根据水位测量精度和传感器参数计算实测误差b;
12、步骤s3,选定不锈钢立杆3安装位置,测量滩涂坡度倾角,包括测量点o、e、f的高程,分别记为ho、he、hf,测量垂直线ao与缓滩of之间的夹角α;
13、步骤s4,根据步骤s2确定的全站仪传感器测角标称误差δ和全站仪测距误差ξ对全站仪传感器与高清视频摄像机的摄像头进行选型;
14、步骤s5,浇筑钢筋混凝土基座,不锈钢立杆3安装于原点o,不锈钢立杆3的顶点为a点;
15、所述测量装置1安装在a点,测量装置1包括各气象传感器1-1、全站仪1-2和高清视频摄像机1-3;
16、沿滩涂敷设有不锈钢基准条板5,所述不锈钢基准条板5的一个端点为原点o;全反射棱镜一6和全反射棱镜二7固定在不锈钢基准条板5;全反射棱镜一6所在位置为e点,e点位于of中间位置,安装于最高水位线以上,全反射棱镜二7所在位置为f点,f点位于不锈钢基准条板上并高于最高水位线的设定高度;
17、边缘计算装置2分别与测量装置、激光测距仪连接,对接收到的数据进行处理,得到水位高程数据;
18、所述激光测距仪4安装于不锈钢立杆底部o点,用于测量ao、oe和of长度;
19、步骤s6,建立分割定位模型,将实时采集的视频图像数据输入到练好的分割定位模型,得到正确的水岸交线输出数据;
20、建立测量模型,选用n-beatsx网络模型,将全站仪对准下视固定标点e、f,测量全站仪实测距离η、全站仪视线和竖直线之间的夹角角度实测值γ,同时采用气象传感器测量相应气象参数,将全站仪实测距离η、全站仪视线和竖直线之间的夹角角度实测值γ以及气象实测值作为输入,以三角形边长||ae||和||af||作为输出;对n-beatsx网络模型进行监督学习,得到训练好的n-beatsx网络模型;所述全站仪实测距离η为ad点之间的距离;
21、利用训练好的n-beatsx网络模型对全站仪实测距离η、夹角角度实测值γ进行修正,其中h=||ao||、||oe||和||of||长度值均通过现场安装的激光测距仪器实测获得;
22、步骤s7,调整全站仪探头自动对准静水位,同时进行无棱镜测距,将获得的全站仪距离η和夹角角度实测值γ、气象实测值输入到步骤s6中训练好的n-beatsx模型,获得修正后的全站仪传感器视线与垂直线之间的夹角θ和全站仪传感器测距离长度l;
23、步骤s8,利用修正后的全站仪传感器视线与垂直线之间的夹角θ和全站仪传感器测距长度l,根据公式w=lcosθ获得ab竖直高度,并计算当前水位高程:h水=h o+h-w;
24、步骤s9,定期更新样本,对n-beatsx网络模型进行再训练,由n-beatsx网络模型计算出水位高程后,在△bod中应用三角函数关系求得od=(ho-h水)/cos(180°-α),即得水岸交线位置数据,与分割定位模型输出的正确的水岸交线输出数据进行比对,得到误差值,当误差值在设定值范围内,判断为准确,否则判断为不准确;如判断为准确,则返回至步骤s7,如判断为不准确,返回至步骤s6。
25、前述的一种基于边缘计算的缓滩水位监测方法,在步骤s2中,所述实测误差b的计算公式为:
26、b≤s (1)
27、
28、其中θ、δ、l、ξ分别为全站仪传感器视线与垂直线之间的夹角、全站仪传感器测角标称误差、全站仪传感器测距离长度和全站仪测距误差。
29、前述的一种基于边缘计算的缓滩水位监测方法,在步骤s4中,所述全站仪1-2和高清视频摄像机1-3通过全站仪自带的伺服控制装置实现对准波浪涨落区水位与岸边交线;所述高清视频摄像机的摄像头视场覆盖水位变动范围下波浪的涨落范围,所述全站仪对准静水条件下水岸交线。
30、前述的一种基于边缘计算的缓滩水位监测方法,在步骤s5中,将支架安装在不锈钢立杆3的顶点,所述高清视频摄像机和全站仪固定于支架上。
31、前述的一种基于边缘计算的缓滩水位监测方法,在步骤s5中,波浪波动范围参数根据由下式计算:
32、
33、式中:r1%为缓滩斜坡面累积频率1%的波浪爬高,h1%为同频率波高,为考虑波浪入射角的折减系数,波浪入射角β1指波峰线与堤坝轴线的夹角;kδ为与斜坡护面结构型式有关的系数;kv为与计算风速v0和波速c有关的系数;kr为kδ=1、h1%=1m时的波浪爬高,kr的表达式如下:
34、kr=1.24th(0.432m)+(n-1.029)q (4)
35、其中,th()表示双曲正切函数,exp()表示指数函数;
36、其中,
37、
38、q=1.09m3.32exp(-1.25m) (7)
39、式中:m为斜坡面的坡度;hm、lm分别为水域的平均水深、平均波长,sh()为双曲正弦函数。
40、前述的一种基于边缘计算的缓滩水位监测方法,在步骤s6中,对于人工标准无风条件下的静水与缓滩水岸交线,由高清视频摄像机对准波浪覆盖区域中心进行视频图像采样,选用nfs-segnet网络模型,将波浪视频图像序列非结构数据和风场结构数据作为nfs-segnet网络模型的输入,静水与缓滩水岸交线作为输出,采用监督学习方法对分割定位模型进行训练,得到训练好的分割定位模型。
41、前述的一种基于边缘计算的缓滩水位监测方法,在步骤s6中,所述三角形边长||ae||和||af||利余弦定理求解三角形δaoe和三角形δaof得到:
42、
43、
44、本发明所达到的有益效果:针对湖泊、漫滩河道等存在长缓滩头的水位测量问题,提出一种考虑气象条件、风浪和温度变形修正的缓滩水位监测系统及方法,本发明的系统以视频数据、全站仪测距测角数据、激光测距数据为基础数据,采用边缘计算架构和无线组网系统,边缘段内置嵌入式轻量化nfs-segnet和n-beatsx神经网络系统,实现波浪和水位高程数据的实时处理、存储,在出现风浪爬高及动态涨落等情况时,可以实现精确测量水面高程;同时根据用户需要实时通过4g/5g等无线通信方式实现水位数据和图像的远传,或通过蓝牙、数据线等通信现地读取,以及系统远/近程无线维护、参数设置和系统升级。
- 还没有人留言评论。精彩留言会获得点赞!