一种雷达目标的跟踪优化方法、系统、车辆及存储介质与流程
本技术涉及智能驾驶,尤其是涉及一种雷达目标的跟踪优化方法、系统、车辆及存储介质。
背景技术:
1、随着经济社会的快速发展 ,人们出行可选的交通方式更加多样,但舒适、便捷的汽车依然是人们交通出行的首选工具之一。更为舒适的乘车环境、更为智能的乘车体验、更高标准的乘车安全,是智慧交通时代人们对汽车技术发展的普遍要求,自动驾驶技术应势而生并蓬勃发展。
2、车载毫米波雷达通过天线向外发射毫米波,接收目标反射信号,经后方处理后快速准确地获取汽车车身周围的物理环境信息(如汽车与其他物体之间的相对距离、相对速度、角度、运动方向等),然后根据所探测的物体信息进行目标追踪和识别分类,进而结合车身动态信息、其他传感器信息进行多源异构信息融合,最终将融合后的目标信息输出给决策层。而决策层会根据目标信息中得到的位置、速度、类型等做出合理决策,进而控制车辆的执行。
3、车载毫米波雷达在目标检测和跟踪过程中,存在遮挡问题:当第一追踪目标遮挡了第二追踪目标时,毫米波雷达无法直接观测到第二追踪目标,导致第二追踪目标的检测点消失,进而导致目标跟踪中断。这是因为毫米波雷达的工作原理决定了它无法穿透物体进行目标观测,因此目标被遮挡时无法获得有效的检测和跟踪信息;同时,虚假点问题:当第一追踪目标靠近雷达时,毫米波雷达可能会产生一些虚假点,即雷达误判为目标的点。这些虚假点可能是由于雷达的探测范围与目标的物理属性(如反射率、形状等)相互作用时产生的。这样的虚假点会导致目标的误识别和误跟踪,给实际应用带来干扰,导致目标误识别和误跟踪。
技术实现思路
1、针对上述技术问题,本技术提出一种雷达目标的跟踪优化方法、系统、车辆及存储介质。
2、第一方面,本技术提供一种雷达目标的跟踪优化方法,包括:
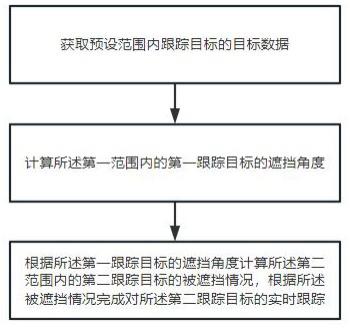
3、s1:获取预设范围内跟踪目标的目标数据,所述预设范围包括第一范围和第二范围。
4、优选地,处于所述第一范围内的追踪目标为第一追踪目标,处于所述第二范围内的追踪目标为第二追踪目标。
5、优选地,所述跟踪目标的目标数据包括位置信息,角度信息和速度信息,所述位置信息,角度信息和速度信息基于车辆雷达为坐标原点的坐标轴确定。
6、优选地,所述第一范围包括以本车为原点划分在一预设距离以内的检测区域。
7、优选地,所述第二范围包括以本车为原点划分在所述一预设距离以外的检测区域。
8、所述预设距离为距离本车中心的径向距离,是从本车的中心点(通常是车辆的几何中心或定位点)到检测区域内的任意点的距离。以车辆的中心点为原点建立一个坐标系,距离本车中心的径向距离即为该点在坐标系中的极坐标半径。
9、s2:计算所述第一范围内的第一跟踪目标的遮挡角度。
10、所述步骤s2,包括:
11、s201:以本车中心为坐标原点o构建坐标系。
12、在这个坐标系中,车辆的位置就是原点o(0, 0),x轴和y轴分别是车辆前进方向和车辆右侧的方向。当毫米波雷达进行目标检测和跟踪时,它会测量目标物体相对于车辆的位置,也就是目标物体在我们构建的坐标系中的坐标。
13、s202:根据所述第一追踪目标的目标数据,计算所述第一追踪目标的雷达检测点的分布区域,根据所述分布区域确定第一追踪目标边界点。
14、在一些实施例中,s2021:获取目标数据:首先,需要获取第一追踪目标的雷达数据,包括其在车载毫米波雷达坐标系中的位置和距离信息。
15、s2022:确定分布区域:根据目标数据,可以使用合适的算法将目标数据转化为雷达检测点的分布区域。常见的方法包括使用高斯分布或者卡尔曼滤波器对目标数据进行处理,以得到目标周围的分布区域。
16、s2023:确定边界点:在得到分布区域后,可以使用合适的算法确定分布区域的边界点。常见的方法包括利用密度聚类算法(如dbscan、meanshift等)寻找目标分布的核心点,并从核心点开始寻找边界点;或者使用阈值分割算法将分布区域二值化,并提取边界点。
17、s203:根据所述第一追踪目标边界点确定第一追踪目标最大临界点a和第一追踪目标最小临界点b。
18、优选地吗,所述第一追踪目标的最大临界点和最小临界点可以被定义为分布区域的最外围点,用于表示目标的边界范围。
19、s2031:找到边界点集合:根据目标边界点的计算结果,将这些点组合成一个点集合。
20、s2032:确定最大临界点a:从边界点集合中找到离坐标原点最远的点,该点即为最大临界点a。可以通过计算每个点与坐标原点的距离,并选择距离最大的点来确定。
21、s2033:确定最小临界点b:从边界点集合中找到离坐标原点最近的点,该点即为最小临界点b。可以通过计算每个点与坐标原点的距离,并选择距离最小的点来确定。
22、所述步骤s2,还包括:
23、s211:所述坐标原点分别连接所述第一追踪目标最大临界点a和第一追踪目标最小临界点b,获得第一遮挡界限oa和第二遮挡界限ob;
24、s212:识别分布于所述第一遮挡界限oa和第二遮挡界限ob周围的雷达检测点;
25、s213:判断所述雷达检测点是否在所述遮挡角度范围内,若在,则保留所述雷达检测点目标数据;否则,标记为虚假点,并进行剔除其目标数据。
26、s3:根据所述第一跟踪目标的遮挡角度计算所述第二范围内的第二跟踪目标的被遮挡情况,根据所述被遮挡情况完成对所述第二跟踪目标的实时跟踪。
27、优选地,根据所述第二追踪目标的目标数据计算所述第二追踪目标的雷达检测点角度,若雷达检测点角度在所述遮挡角度范围内,则标记所述第二追踪目标为被遮挡的第二追踪目标。
28、若所述被遮挡的第二追踪目标是静止目标,则所述被遮挡的第二追踪目标的目标数据保持不变;若所述被遮挡的第二追踪目标是运动目标,则根据匀速直线运动状态保持对所述被遮挡的第二追踪目标的运动跟踪,并更新目标数据。
29、优选地,如果所述被遮挡的第二追踪目标是运动的目标,可以根据目标的运动状态进行跟踪,并更新目标数据。根据匀速直线运动的假设,可以利用前一时刻的目标数据以及距离上一个时刻的时间间隔,预测目标在当前时刻的位置。通过与当前的雷达检测结果进行匹配,可以更新目标的位置和速度等信息。
30、优选地,获取被遮挡的第二追踪目标的当前位置信息,根据所述目标的速度信息,基于匀速直线运动模型计算出一个时间步长内目标的位移量:位移量 = 速度 * 时间步长即x=vx * t,y=vy * t;更新目标的位置信息:新位置= 当前位置 + 位移量即x = x0 + x,y = y0 + y,将新位置作为目标的更新位置。
31、本技术还提供一种雷达目标的跟踪优化系统,所述系统包括:
32、采集模块,用于采集预设范围内跟踪目标的目标数据;
33、第一计算模块,计算所述第一范围内的第一跟踪目标的遮挡角度;
34、第二计算模块,根据所述第一跟踪目标的遮挡角度计算所述第二范围内的第二跟踪目标的被遮挡情况;
35、识别模块,用于识别分布于所述第一遮挡界限oa和第二遮挡界限ob周围的雷达检测点。
36、优选地,所述系统还包括虚假点消除模块,用于消除被识别为的虚假点的所述追踪目标的目标检测点。
37、本技术还提供一种车辆,所述车辆包括:
38、安装于车辆端的多个雷达传感器,用于采集预设范围内跟踪目标的目标数据;
39、与所述多个雷达传感器通信连接的车辆控制器,所述车辆控制器采用如上所述的雷达目标的跟踪优化方法对所述目标数据进行处理。
40、本技术还提供一种计算机可读存储介质,其存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的雷达目标的跟踪优化方法。
41、综上所述,本技术提供了一种雷达目标的跟踪优化方法、系统、车辆及存储介质,通过获取预设范围内跟踪目标的目标数据,所述预设范围包括第一范围和第二范围,计算所述第一范围内的第一跟踪目标的遮挡角度,根据所述第一跟踪目标的遮挡角度计算所述第二范围内的第二跟踪目标的被遮挡情况,根据所述被遮挡情况完成对所述第二跟踪目标的实时跟踪。相比于现有技术,本技术具备以下技术效果:
42、有效的识别标记雷达第二追踪目标被雷达第一追踪目标遮挡所产生的虚假点,并剔除标记的虚假点,使得雷达第二追踪目标被雷达第一追踪目标遮挡情况下,无目标直接反射点时导致的目标追踪失败的雷达第二追踪目标能够准确被跟踪识别并更新其目标数据,增强车辆安全性。
- 还没有人留言评论。精彩留言会获得点赞!