基于有源信标协同的煤矿移动机器人导航方法与流程
本发明属于煤矿智能化,具体涉及一种基于有源信标协同的煤矿移动机器人导航方法。
背景技术:
1、随着煤矿移动机器人在煤矿井下开采中逐渐成为主力设备,其在井下自主运行成为急需解决的问题,然而,自主运行的重要前提是煤矿移动机器人精确导航。目前,采煤机、掘进机、巡检、运输等移动机器人靠自身传感器构建的导航系统受空间、环境等因素的影响,难以实现快速精确可靠的导航规划以及机器人之间的协同导航。
2、因此,亟需提出一种高精度的有源信标协同的煤矿移动机器人导航方法。
技术实现思路
1、为解决现有煤矿移动机器人靠自身传感器构建的导航系统受空间、环境等因素的影响,难以实现快速精确可靠的导航规划以及机器人之间的协同导航的问题,本发明公开了面向煤矿移动机器人精确导航方法,根据煤矿巷道、掘进工作面及固定设备场所等不同煤矿井下场景的煤矿移动机器人导航任务,构建基于煤矿井下高精度动态四维地理信息系统(4d-gis)和导航信标协同的煤矿移动机器人精确导航方法,根据不同煤矿井下场景的煤矿移动机器人导航任务需求,实时动态优化机器人路径规划决策,确定机器人、机器人与机器人之间的导航策略。本发明方法能够极大提高煤矿井下移动机器人的部署效率,提升煤矿移动机器人在复杂环境下的精确移动与作业可靠性,为煤矿移动机器人精确导航与机器人群协同作业提供可靠依据。
2、为了实现上述目的,本发明提供如下技术方案:
3、一种基于有源信标协同的煤矿移动机器人导航方法,包括如下步骤:
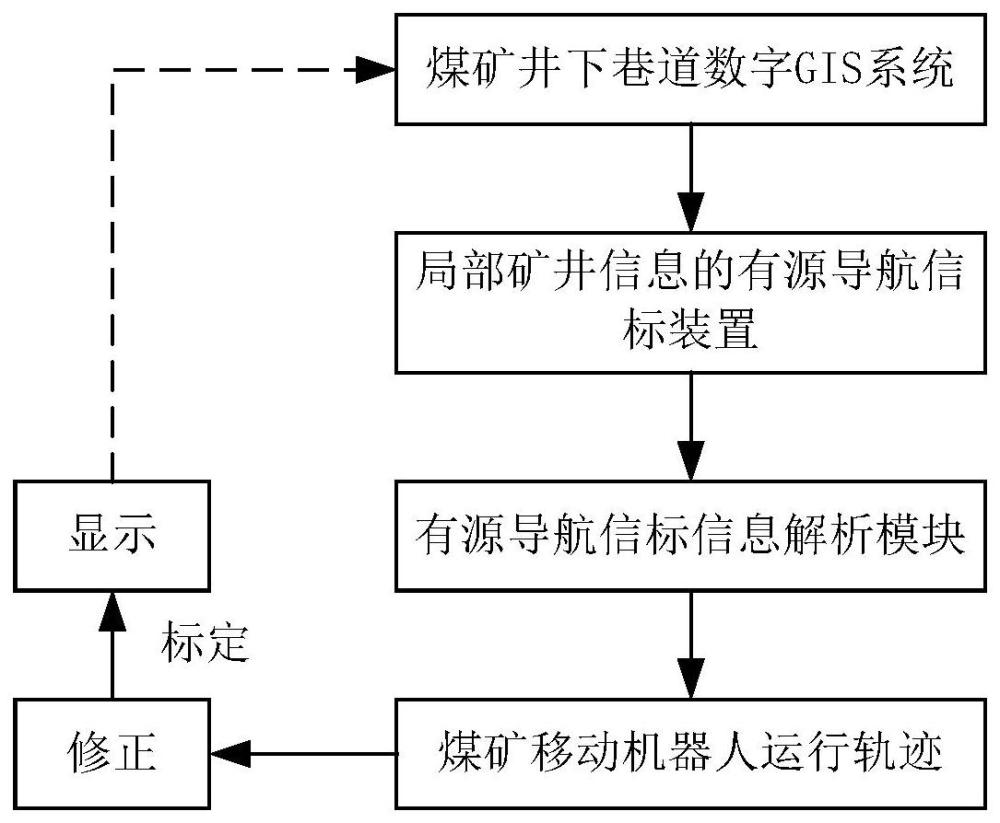
4、步骤一:构建动态四维地理信息4d-gis;
5、步骤二:构建具有局部矿井信息的有源导航信标装置;
6、步骤三:利用步骤一构建的所述4d-gis和步骤二所述的有源导航信标装置,解析煤矿移动机器人运行轨迹;
7、步骤四:根据当前信标的特征信息确定煤矿移动机器人在gis系统中所标定的位置,利用准确的有源导航信标装置存放的巷道位置信息,对煤矿移动机器人在4d-gis中的位置进行校正;同时,根据信标存储的特征信息,对煤矿移动机器人的连续作业轨迹进行规划与修正,实现煤矿移动机器人根据自身作业特征进行实时导航。
8、本发明的进一步技术方案是:所述步骤一中构建动态4d-gis的过程为:基于煤矿巷道设计数据、地质勘探数据及井下巷道探测数据,利用数字孪生技术,构建煤矿井下巷道数字gis,结合定时采集的巷道数据、掘进巷道实时采集数据,构建高精度动态4d-gis。
9、本发明的进一步技术方案是:所述步骤二中的所述有源信标装置实现煤矿移动机器人所在巷道的绝对位置解析,其包括通信连接的局部矿井定位信息储存单元、无线数据收发单元、信息交互单元、电源模块;局部矿井定位信息存储单元中存放巷道历史数据信息;无线数据收发单元作为数据接收与发送的定位信息通信单元;信息交互单元为无线射频单元,实现与移动机器人接收机的通信协议握手;电源模块为有源导航信标装置提供动力源。
10、本发明的进一步技术方案是:所述步骤二中的所述有源信标装置还包括有源导航信标信息解析模块,用于解析巷道历史数据信息。
11、本发明的进一步技术方案是:所述巷道历史数据信息包括放巷道位置、巷道气体环境数据、巷道围岩特征数据、巷道作业工艺;
12、所述巷道位置信息解析为当前机器人所在巷道的绝对位置;
13、所述巷道气体环境数据信息解析为当前巷道位置环境中的气体种类及其浓度数据;
14、所述巷道围岩特征数据解析为当前巷道围岩尺寸、地质数据相关特征参数;
15、所述巷道作业工艺信息解析为掘进工作面作业、综采工作面作业相关工艺参数。
16、本发明的进一步技术方案是:所述图像信标包括解析图形,用于解析出当前煤矿移动机器人所在巷道的绝对位置信息。
17、本发明的进一步技术方案是:所述步骤三种构建煤矿移动机器人运行轨迹过程为:煤矿移动机器人在巷道中移动过程中,通过高精度动态4d-gis和有源导航信标装置,解析煤矿移动机器人运行轨迹;同时,煤矿移动机器人根据自身作业特征,通过与有源导航信标装置进行通信信息握手,并根据信息解析模块获取与自身作业特征相关的位置、环境、作业信标存储的特征信息。
18、本发明的进一步技术方案是:所述步骤三中构建煤矿移动机器人运行轨迹后,并将运行轨迹实时显示在4d-gis中。
19、本发明提供另一种技术方案:
20、一种实现上述煤矿移动机器人导航方法的系统。
21、本发明与现有技术相比具有的优点:
22、1.本发明提供的一种基于有源信标协同的煤矿移动机器人导航方法及系统,通过建立煤矿井下4d-gis与有源信标协同工作,根据不同煤矿井下场景的煤矿移动机器人导航任务需求,实时动态优化机器人路径规划决策,确定机器人、机器人与机器人之间的导航策略,能够极大提高煤矿井下移动机器人的部署效率,提升煤矿移动机器人在复杂环境下的精确移动与作业可靠性,为煤矿移动机器人精确导航与机器人群协同作业提供可靠依据。
23、2.本发明提供的一种基于有源信标协同的煤矿移动机器人导航方法及系统,不存在累积误差,极大提高煤矿移动机器人的作业效率,实时为煤矿移动机器人提供准确的导航信息。
24、附图说明
25、为了更清楚地说明本发明的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对本发明保护范围的限定。
26、图1为本发明一种基于有源信标协同的煤矿移动机器人导航方法示意图。
27、图2为本发明一种基于有源信标协同的煤矿移动机器人导航系统模块图。
28、图3为本发明一种基于有源信标协同的煤矿移动机器人导航有源信标原理图。
技术特征:
1.基于有源信标协同的煤矿移动机器人导航方法,其特征在于:包括如下方法步骤:
2.根据权利要求1所述的煤矿移动机器人导航方法,其特征在于:所述步骤1中构建动态4d-gis的过程为:基于煤矿巷道设计数据、地质勘探数据及井下巷道探测数据,利用数字孪生技术,构建煤矿井下巷道数字gis,结合定时采集的巷道数据、掘进巷道实时采集数据,构建高精度动态4d-gis。
3.根据权利要求1所述的煤矿移动机器人导航方法,其特征在于:所述步骤2中的有源导航信标装置实现煤矿移动机器人所在巷道的绝对位置解析,其包括通信连接的局部矿井定位信息储存单元、无线数据收发单元、信息交互单元、电源模块;局部矿井定位信息存储单元中存放巷道历史数据信息;无线数据收发单元作为数据接收与发送的定位信息通信单元;信息交互单元为无线射频单元,实现与移动机器人接收机的通信协议握手;电源模块为有源导航信标装置提供动力源。
4.根据权利要求3所述的煤矿移动机器人导航方法,其特征在于:所述步骤2中的所述有源信标装置还包括有源导航信标信息解析模块,用于解析巷道历史数据信息。
5.根据权利要求3所述的煤矿移动机器人导航方法,其特征在于:所述巷道历史数据信息包括放巷道位置、巷道气体环境数据、巷道围岩特征数据、巷道作业工艺;
6.根据权利要求3所述的煤矿移动机器人导航方法,其特征在于:所述图像信标包括解析图形,用于解析出当前煤矿移动机器人所在巷道的绝对位置信息。
7.根据权利要求1所述的煤矿移动机器人导航方法,其特征在于:所述步骤3中构建煤矿移动机器人运行轨迹过程为:煤矿移动机器人在巷道中移动过程中,通过高精度动态4d-gis和有源导航信标装置,解析煤矿移动机器人运行轨迹;同时,煤矿移动机器人根据自身作业特征,通过与有源导航信标装置进行通信信息握手,并根据信息解析模块获取与自身作业特征相关的位置、环境、作业信标存储的特征信息。
8.根据权利要求1所述的煤矿移动机器人导航方法,其特征在于:所述步骤3中构建煤矿移动机器人运行轨迹后,并将运行轨迹实时显示在4d-gis中。
9.一种实现权利要求1-8任一项所述煤矿移动机器人导航方法的系统。
技术总结
本发明属于煤矿智能化技术领域,具体涉及一种基于有源信标协同的煤矿移动机器人导航方法及系统。通过建立煤矿井下4D‑GIS与有源信标协同工作,根据不同煤矿井下场景的煤矿移动机器人导航任务需求,实时动态优化机器人路径规划决策,确定机器人、机器人与机器人之间的导航策略,能够极大提高煤矿井下移动机器人的部署效率,提升煤矿移动机器人在复杂环境下的精确移动与作业可靠性,为煤矿移动机器人精确导航与机器人群协同作业提供可靠依据,极大提高煤矿移动机器人的作业效率,实时为煤矿移动机器人提供准确的导航信息。
技术研发人员:王星,马宏伟,董振良,薛旭升,张阳,蔺小虎,谈娌娜,廖烨,赵毛,赵骋骋,赵英杰,周文剑,苏浩
受保护的技术使用者:中煤能源研究院有限责任公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!