一种无人越野车辆通过障碍地形的安全行为检测方法
本发明涉及车辆安全控制,尤其涉及一种无人越野车辆通过障碍地形的安全行为检测方法。
背景技术:
1、基于无人驾驶技术的无人越野车辆如今广泛应用于城市物流、矿区运输、野外探测及军事等多个领域。在城市环境中的无人驾驶技术考虑的是二维环境中的交互关系,目前相关技术较成熟,应用也较多。除了城市场景的自动驾驶车辆,越野无人驾驶汽车在探险和野外研究领域具有巨大潜力。
2、越野车辆作为在野外实现无人驾驶功能与完成任务的平台,常需要在具有较大风险的障碍地形下行驶,如果不提前识别无人越野车辆能否安全通过规划的路径,可能造成侧翻等严重后果,丧失行驶与任务完成能力。这类问题严重危害了无人驾驶越野车辆的作业效率与自身安全性。因此在进行相关行为之前,对于越野车辆通过障碍地形的安全行为检测是至关重要的。
3、针对这些技术问题,现有的技术主要是基于传感器数据的实时监测和控制策略。例如,利用惯导、力传感器、悬架位移传感器等获取本体感知数据。同时,利用动力学微分模型对车辆当前行驶状态进行安全性判断,以实现对车辆行驶状态的实时安全检测。然而在障碍地形下,为了使应用于野外探测越野车辆具备翻越垂直墙、跨越壕沟等工况下的通过能力,需要综合考虑三维障碍地形信息、车辆的通过性和车辆的连续通行状态。目前相关的研究还不够充分,对规划路径的安全性检测不完善,导致路径的可通行性不高。
技术实现思路
1、鉴于上述的分析,本发明实施例旨在提供一种无人越野车辆通过障碍地形的安全行为检测方法,用以解决现有障碍地形的路径可通行性不高的问题。
2、本发明实施例提供一种无人越野车辆通过障碍地形的安全行为检测方法,包括以下步骤:
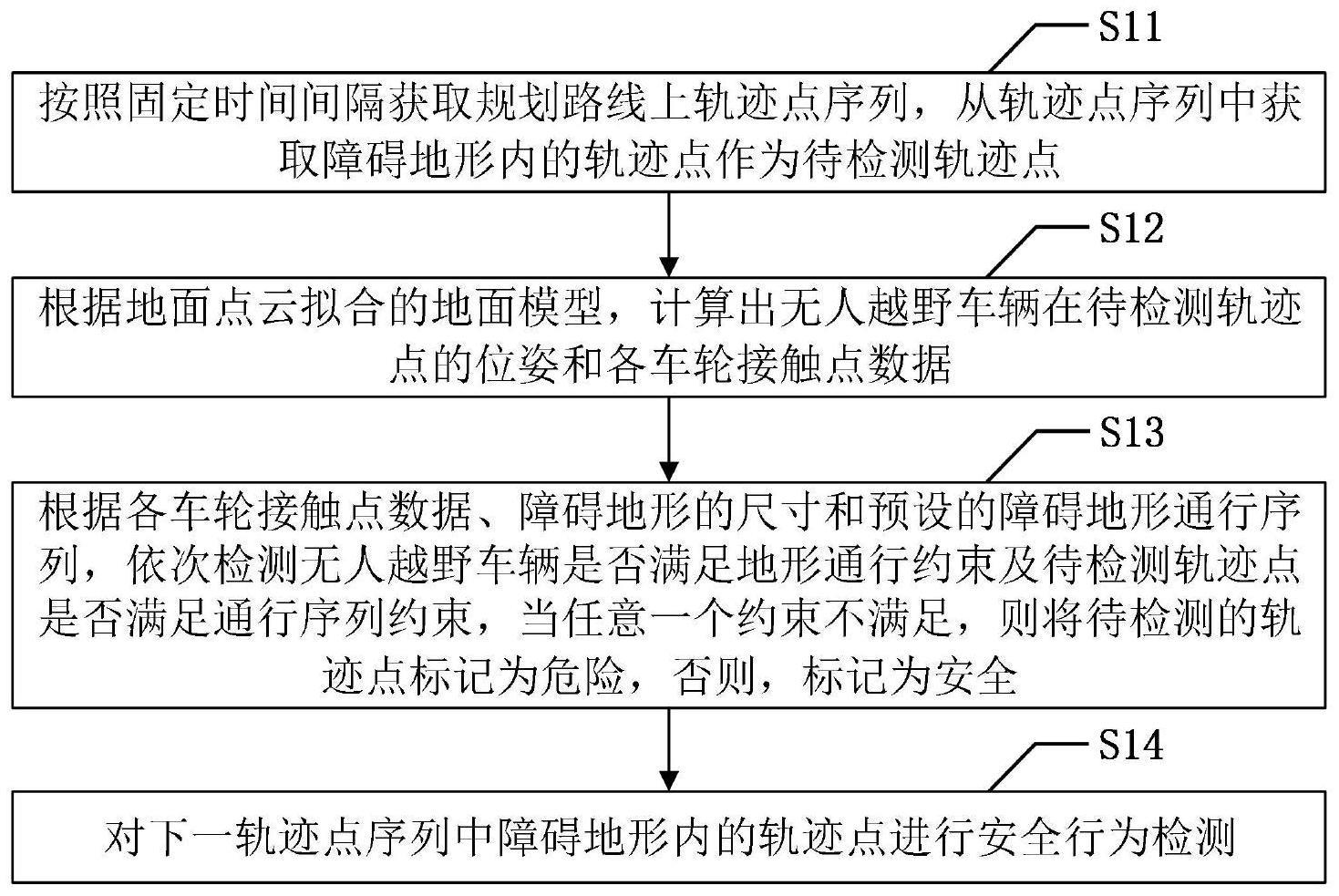
3、按照固定时间间隔获取规划路线上轨迹点序列,从轨迹点序列中获取障碍地形内的轨迹点作为待检测轨迹点;
4、根据地面点云拟合的地面模型,计算出无人越野车辆在待检测轨迹点的位姿和各车轮接触点数据;
5、根据各车轮接触点数据、障碍地形的尺寸和预设的障碍地形通行序列,依次检测无人越野车辆是否满足地形通行约束及待检测轨迹点是否满足通行序列约束,当任意一个约束不满足,则将待检测的轨迹点标记为危险,否则,标记为安全;
6、对下一轨迹点序列中障碍地形内的轨迹点进行安全行为检测。
7、基于上述方法的进一步改进,根据地面点云通过以下步骤拟合地面模型:
8、每个地面点云作为一个控制点,采用三次b样条方法拟合出曲面;将曲面划分为由矩形单元组成的栅格地图,将每个栅格内的地面点云的高度平均值作为该栅格的高度;根据每个栅格的中心坐标和高度拟合出地面的数学模型,作为地面模型。
9、基于上述方法的进一步改进,根据地面点云拟合的地面模型,计算出无人越野车辆在各轨迹点的位姿和各车轮接触点数据,包括:
10、构建底盘的栅格地图,根据地面模型中的地面高度,获取无人越野车辆在每个栅格中底盘距离地面的高度,得到底盘高度图;
11、初始化旋转矩阵,根据地面模型和底盘高度图,获取无人越野车辆与地面的接触栅格作为接触点数据,根据接触点数据得到支撑多边形;
12、根据支撑多边形对位姿不稳定的轨迹点计算出旋转轴,并围绕旋转轴以固定角度旋转无人越野车辆,更新旋转矩阵和底盘高度图,重新获取接触点数据和支撑多边形,直至轨迹点位姿稳定;根据最终的接触点数据和无人越野车辆尺寸,得到各车轮接触点数据,并根据最终的旋转矩阵得到无人越野车辆在对应轨迹点的位姿。
13、基于上述方法的进一步改进,根据支撑多边形对位姿不稳定的轨迹点计算出旋转轴,包括:
14、计算无人越野车辆质心在底盘高度图上的投影点到支撑多边形每个点和每条边的距离;如果最短距离对应的是点,则旋转轴是经过该点且与该点到投影点的直线正交的直线;否则,旋转轴是最短距离对应的边所在直线。
15、基于上述方法的进一步改进,障碍地形包括垂直墙和壕沟;障碍地形的尺寸通过以下步骤获取:采集无人越野车辆拍摄的图像,利用训练好的神经网络识别出图像中的垂直墙和壕沟区域,根据对应区域的地面点云,估计出障碍地形中垂直墙高度、垂直墙的上下沿区域、壕沟宽度和壕沟的前后沿区域。
16、基于上述方法的进一步改进,检测无人越野车辆是否满足地形通行约束包括:无人越野车辆翻越垂直墙的最大高度是否大于估计的垂直墙高度,无人越野车辆跨越壕沟的最大宽度是否大于估计的壕沟宽度;如果大于,则满足地形通行约束。
17、基于上述方法的进一步改进,无人越野车辆翻越垂直墙的最大高度是根据无人越野车辆驱动电机的输出扭矩和路面附着系数,计算出无人越野车辆前轮和后轮最大爬坡高度中的最小值;无人越野车辆跨越壕沟的最大宽度是根据无人越野车辆前轮和后轮跨越壕沟时驱动电机的输出扭矩以及无人越野车辆车轮直径分别计算出最大跨越宽度中的最小值。
18、基于上述方法的进一步改进,障碍地形通行序列是基于翻越垂直墙和跨越壕沟的各阶段,采集有人驾驶模式下无人越野车辆在各阶段各车轮与地面的接触情况及各车轮与垂直墙和壕沟的相对位置而统计得到的车轮状态转移顺序。
19、基于上述方法的进一步改进,障碍地形通行序列中每种车轮状态至少有一种车轮接触情况,每种车轮状态对应的前后轮与垂直墙或壕沟的相对位置不同;前后轮与垂直墙或壕沟的相对位置包括:前后轮相对于垂直墙的上下沿区域的位置,及,前后轮相对于壕沟的前后沿区域的位置。
20、基于上述方法的进一步改进,检测待检测轨迹点是否满足通行序列约束包括:根据障碍地形通行序列,比对出待检测轨迹点的车轮接触点数据对应的状态;依次检测每相邻两个待检测轨迹点的状态,记录不同的状态,得到实际通行序列;当实际通行序列存在于障碍地形通行序列中,则满足通行序列约束,否则不满足通行序列约束。
21、与现有技术相比,本发明至少可实现如下有益效果之一:使用垂直墙/壕沟通行性粗检测和障碍地形通行序列的精检测,实现了对障碍地形的多种安全行为的检测,提高了障碍地形的路径可通行性和安全性;这种精确到点的安全性分级,对错误的规划路线做出提前的预警,可以更好地在危险发生之前发出警报而及时纠正危险行为,有利于无人越野车辆及时调整预期行为。
22、本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
技术特征:
1.一种无人越野车辆通过障碍地形的安全行为检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的无人越野车辆通过障碍地形的安全行为检测方法,其特征在于,根据地面点云通过以下步骤拟合地面模型:
3.根据权利要求1所述的无人越野车辆通过障碍地形的安全行为检测方法,其特征在于,所述根据地面点云拟合的地面模型,计算出无人越野车辆在各轨迹点的位姿和各车轮接触点数据,包括:
4.根据权利要求3所述的无人越野车辆通过障碍地形的安全行为检测方法,其特征在于,所述根据支撑多边形对位姿不稳定的轨迹点计算出旋转轴,包括:
5.根据权利要求1所述的无人越野车辆通过障碍地形的安全行为检测方法,其特征在于,所述障碍地形包括垂直墙和壕沟;所述障碍地形的尺寸通过以下步骤获取:采集无人越野车辆拍摄的图像,利用训练好的神经网络识别出图像中的垂直墙和壕沟区域,根据对应区域的地面点云,估计出障碍地形中垂直墙高度、垂直墙的上下沿区域、壕沟宽度和壕沟的前后沿区域。
6.根据权利要求5所述的无人越野车辆通过障碍地形的安全行为检测方法,其特征在于,检测无人越野车辆是否满足地形通行约束包括:无人越野车辆翻越垂直墙的最大高度是否大于估计的垂直墙高度,无人越野车辆跨越壕沟的最大宽度是否大于估计的壕沟宽度;如果大于,则满足地形通行约束。
7.根据权利要求6所述的无人越野车辆通过障碍地形的安全行为检测方法,其特征在于,所述无人越野车辆翻越垂直墙的最大高度是根据无人越野车辆驱动电机的输出扭矩和路面附着系数,计算出无人越野车辆前轮和后轮最大爬坡高度中的最小值;所述无人越野车辆跨越壕沟的最大宽度是根据无人越野车辆前轮和后轮跨越壕沟时驱动电机的输出扭矩以及无人越野车辆车轮直径分别计算出最大跨越宽度中的最小值。
8.根据权利要求5所述的无人越野车辆通过障碍地形的安全行为检测方法,其特征在于,所述障碍地形通行序列是基于翻越垂直墙和跨越壕沟的各阶段,采集有人驾驶模式下无人越野车辆在各阶段各车轮与地面的接触情况及各车轮与垂直墙和壕沟的相对位置而统计得到的车轮状态转移顺序。
9.根据权利要求8所述的无人越野车辆通过障碍地形的安全行为检测方法,其特征在于,所述障碍地形通行序列中每种车轮状态至少有一种车轮接触情况,每种车轮状态对应的前后轮与垂直墙或壕沟的相对位置不同;所述前后轮与垂直墙或壕沟的相对位置包括:前后轮相对于垂直墙的上下沿区域的位置,及,前后轮相对于壕沟的前后沿区域的位置。
10.根据权利要求9所述的无人越野车辆通过障碍地形的安全行为检测方法,其特征在于,检测待检测轨迹点是否满足通行序列约束包括:根据障碍地形通行序列,比对出待检测轨迹点的车轮接触点数据对应的状态;依次检测每相邻两个待检测轨迹点的状态,记录不同的状态,得到实际通行序列;当实际通行序列存在于障碍地形通行序列中,则满足通行序列约束,否则不满足通行序列约束。
技术总结
本发明涉及一种无人越野车辆通过障碍地形的安全行为检测方法,属于车辆安全控制技术领域,解决了现有障碍地形的路径可通行性不高的问题。包括:获取规划路线上未检测的轨迹点序列,从轨迹点序列中获取障碍地形内的轨迹点作为待检测轨迹点;根据地面模型计算出无人越野车辆在待检测轨迹点的位姿和各车轮接触点数据;根据各车轮接触点数据、障碍地形的尺寸和预设的障碍地形通行序列,依次检测无人越野车辆是否满足地形通行约束及待检测轨迹点是否满足通行序列约束;当任意一个约束不满足,则将已检测的轨迹点标记为危险,否则标记为安全;对下一轨迹点序列中障碍地形内的轨迹点进行安全行为检测。实现了通过障碍地形的安全行为检测。
技术研发人员:刘海鸥,李世豪,薛明轩,张翔,李志伟,王博洋,陈慧岩
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!