基于IMU、数字室分和WiFi的室内综合定位方法与流程
本发明属于移动通信,尤其涉及基于imu、数字室分和wifi的室内综合定位方法。
背景技术:
1、随着位置服务的广泛需求,室内定位技术成为一个重要的研究领域,现有的室内定位方法主要基于wifi、蓝牙(ble)、超宽带(uwb)、视觉定位等手段。这些技术各有优缺点,难以单独实现高精度和高可靠的室内定位。
2、wifi定位依赖现有wifi ap(基站),定位精度受信号覆盖范围影响,一般在3~30m,ble与uwb技术需要额外部署定位传感器,增加了部署成本与难度,视觉定位对环境光线要求较高,遭遇光线不佳环境时精度显著下降。此外,这些技术大多只能提供二维平面定位,无法满足三维空间需求。
3、对于imu(惯性测量单元)可以检测到机体的运动和姿态,基于imu的惯性导航可实现无基站辅助的的自主定位。但是,由于航向误差和位置漂移的存在,imu定向误差会随着时间增加,无法长时间保持高精度。
4、另外5g时代,数字室分系统(dis)也应用到室内无线通信领域,利用5g技术实现室内定位,但是同样面临定位精度有限、辨识与管理难度大、网络连接不稳定、多径效应显著、部署成本高等技术短板。
5、基于此,需要一种新型室内定位方法来综合利用现有技术,弥补自己的各自不足,实现高精度三维定位。
技术实现思路
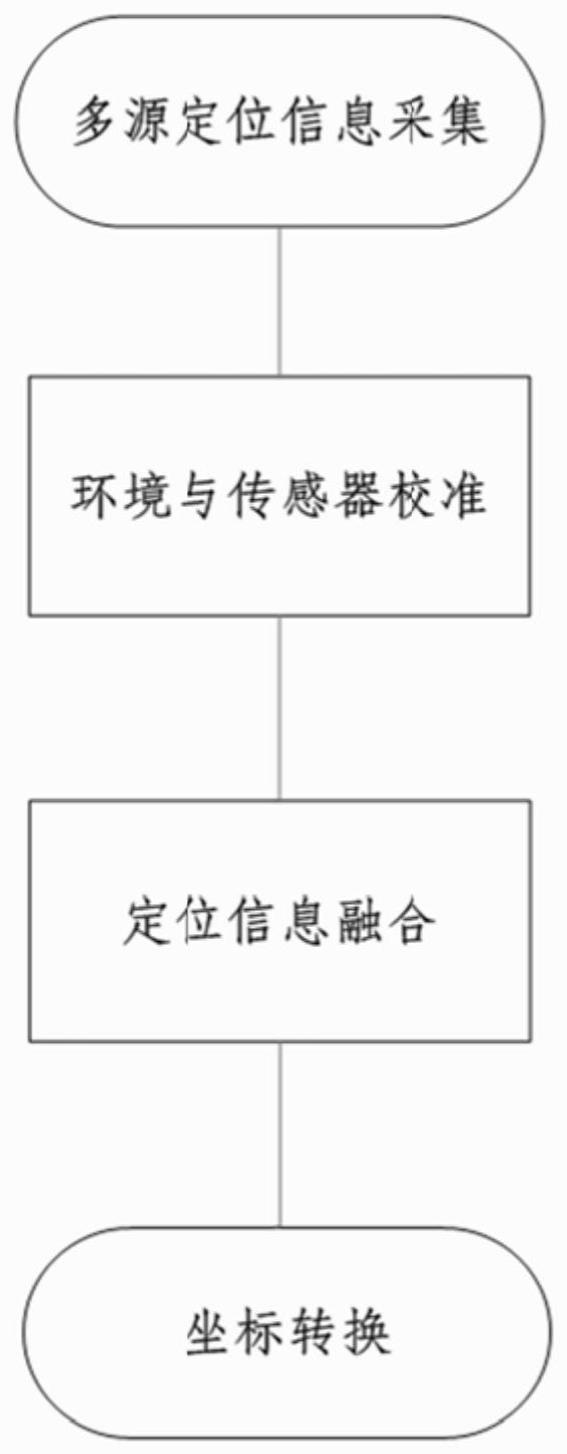
1、发明目的:本发明所要解决的技术问题是针对现有技术的不足,提供基于imu(inertial measurement unit,惯性测量单元)、数字室分和wifi的室内综合定位方法,解决现有室内定位技术难以实现高精度三维定位的难题,该方法有效融合imu、5g数字室分和wifi等多源定位信息,构建室内三维坐标,实现实时和连续的位置修正与导航,达到高精度三维定位的目的。本发明方法包括以下步骤:
2、步骤1,采集多源定位信息,包括imu信息、5g数字室分信息和wifi信息,并对时间戳进行同步转换;
3、步骤2,进行环境与传感器校准,完成wifi分析、imu分析和5g小基站分析;
4、步骤3,融合定位信息,得到设备的三维空间定位与姿态信息;
5、步骤4,分别进行wifi坐标系、5g小基站坐标系、imu输出的位置增量的坐标转换,得到设备的最终姿态结果。
6、步骤1包括:
7、步骤1-1,采集imu信息:在测量时间起点t0开始,连续采集imu的加速度、角速度和地磁信息,并以t0为时间戳进行标记,获得imu数据序列:
8、{a1,w1,m1,t01},{a2,w2,m2,t02},...,{an,wn,mn,t0n},
9、其中an表示第n个数据样本的加速度数据,包含x轴、y轴和z轴三个方向上的加速度值;
10、wn表示第n个数据样本的角速度数据,包含绕x轴、y轴和z轴三个方向的角速度值;
11、mn表示第n个数据样本的地磁数据,包含x轴、y轴和z轴三个方向的地磁强度值;
12、t0n表示第n个数据样本对应的时间戳,位于测量时间起点t0之后;
13、步骤1-2,采集5g数字室分信息:在测量时间起点t1开始,连续采集相关小基站的位置坐标、信号强度ss(signal strength)和到达时间信息toa(time of arrival),以t1为时间戳进行标记,获得5g数据序列:
14、{b1,s1,t1,t11},{b2,s2,t2,t12},...,{bm,sm,tm,t1m},
15、其中bm表示第m个小基站的位置坐标;
16、sm表示从第m个小基站接收到的信号强度;
17、tm表示信号从第m个小基站发出到达定位目标的到达时间;
18、t1m表示第m个数据样本的采集时间戳,基于5g信息采集设备内部时钟;
19、步骤1-3,采集wifi信息:在测量时间起点t2开始,连续采集相关wifi接入点ap(access point)的mac地址、信号强度ss和到达时间信息toa,以t2为时间戳进行标记,获得wifi数据序列:
20、{w1,ss1,toa1,t21},{w2,ss2,toa2,t22},...,{wn,ssn,toan,t2n},
21、其中wn表示wifi第n个接入点ap的mac地址,用于识别ap;
22、ssn表示从第n个接入点ap接收到的信号强度;
23、toan表示信号从第n个接入点ap发出后到达定位目标设备的时间;
24、t2n表示第n个数据样本的采集时间戳;
25、步骤1-4,以全球系统时间gst(global system time全球系统时间)为绝对时间基准,对imu数据序列、5g数据序列和wifi数据序列的时间戳进行同步转换,得到同步后的数据序列:
26、imu数据序列:{a1,w1,m1,t01_sync},{a2,w2,m2,t02_sync},...,{an,wn,mn,t0n_sync},t0n_sync表示第n个imu数据样本的采集时间点;
27、5g数据序列:{b1,s1,t1,t11_sync},{b2,s2,t2,t12_sync},...,{bm,sm,tm,t1m_sync},t1m_sync表示第n个5g数据样本的采集时间点;
28、wifi数据序列:{w1,ss1,toa1,t21_sync},{w2,ss2,toa2,t22_sync},...,{wn,ssn,toan,t2n_sync};t2n_sync表示第n个wifi数据样本的采集时间点;
29、步骤1-5,基于imu数据序列、5g数据序列和wifi数据序列中位置相关性,建立信息间的对应关系。
30、步骤2包括:
31、步骤2-1,选择环境:设定测试环境,测试环境内有wifi ap和5g小基站,使用imu传感器采集姿态信息;
32、步骤2-2,wifi分析:在测试环境内不同位置,分别测量每个wifi接入点ap的接收信号强度指示rssi(received signal strength indicator,接收信号强度指示),统计全部wifi ap在各位置的综合接收信号强度指示rssi,分析接收信号强度指示rssi与环境位置的关系;
33、步骤2-3,imu分析;
34、步骤2-4,5g小基站分析。
35、4、根据权利要求3所述的方法,其特征在于,步骤2-2包括:
36、步骤2-2-1,收集测试数据:测试环境下,在各个位置测量从两个以上wifi接入点ap接收到的接收信号强度指示rssi,录入测试结果矩阵,同时记录各位置的环境信息;
37、步骤2-2-2,数据预处理:去除测试结果矩阵中异常值与噪声,对矩阵进行平滑处理,同时标定各位置的绝对坐标;
38、步骤2-2-3,利用测量结果拟合wifi路径损耗模型:rssi=a–10qlog10(d),其中a为插补常数,q为路径损耗指数,d为wifi接入点与目标设备之间的距离;
39、步骤2-2-4,比较同一位置不同墙壁和人流条件下的接收信号强度指示rssi,统计衰减量,建立墙壁材料和人流密度到rssi衰减的映射关系:
40、定义测试点位置为p,墙壁数量为z,第i面墙壁的材质为material_i,每种墙壁材质到rssi衰减量的对应关系为attenuation_i=f(material_i);其中attenuation_i表示第i面墙壁导致的wifi信号衰减量,material_i表示第i面墙壁的材质,f()是一个函数,输入变量是墙壁材质,输出结果是wifi信号在该材质墙上的衰减量;
41、定义人流密度为population_density,单位为人/平方米,人流密度到接收信号强度指示rssi衰减量的对应关系为attenuation_pop=k*population_density,其中k为环境参数,例如人流密度每增加0.1人/平方米,接收信号强度指示rssi减小2db,则k=20;attenuation_pop表示人流密度导致的wifi信号额外衰减量;
42、测试点位置p的接收信号强度指示rssi衰减量rssi_attenuation(p)为:
43、rssi_attenuation(p)=σattenuation_i+attenuation_pop
44、步骤2-2-5,建立环境信息模型:在matlab中构建一个仿真环境,布置两个以上接入点ap与测试位置,输入wifi路径损耗模型、墙壁材料和人流密度到接收信号强度指示rssi衰减的映射关系、测试位置绝对坐标与环境信息,环境信息模型能够输出每个位置预期的接收信号强度指示rssi值,公式为:
45、pl(x,y,z)=σpli+attn_wall+attn_human
46、其中pli是每个api的路径损耗,其中api表示第i个接入点,attn_wall是墙壁引起的总体wifi信号衰减量(它综合考虑了墙壁的材质和数量两个因素);attn_human是人流密度,pl(x,y,z)是坐标为(x,y,z)的位置期望接收到的wifi信号强度,也就是综合路径损耗;
47、测试点预期的接收信号强度指示rssi为:
48、rssi(x,y,z)=σ(pti-pl(x,y,z))
49、其中pti为每个api的发射功率(dbm);rssi(x,y,z)表示坐标为(x,y,z)的位置预测的wifi综合信号强度;
50、步骤2-2-6,结果验证:将环境信息模型输出的rssi结果与测试数据进行比对,计算误差,调整模型参数,直到误差达到可接受水平,最终得到修正后的环境信息模型,具体包括:
51、设环境信息模型输出的测试点位置p的接收信号强度指示rssi预测值为rssi_pred(p);
52、测试点位置p的实际接收信号强度指示rssi测量值为rssi_real(p);
53、则模型预测结果和实测结果的误差x1为:
54、x1=rssi_pred(p)-rssi_real(p)
55、为评估整个模型的预测误差,计算所有测试点的平均误差x2:
56、
57、其中r为测试点总数;
58、如果平均误差x2超过预设的阈值θ,则调整模型,重新运行;
59、对测试环境简单,数据量少的情况,θ取6-8db;
60、对测试点较多,环境复杂的情况,θ取3-5db;
61、如果要求高精度可以将θ设定为2~3db;
62、如果精度要求不高,也可以取10db左右。
63、步骤2-3包括:
64、步骤2-3-1,imu测试:
65、在目标环境下,分别在以下条件下采集imu原始数据:
66、静止状态:imu平放在桌面上不动,连续采集1分钟数据,理论上输出为0;
67、人行走:测试者手持imu缓慢行走,连续采集3分钟的数据;
68、不同姿态:imu采集仰躺、侧躺、俯卧的加速度与角速度数据,每姿态1分钟;
69、步骤2-3-2,静止状态误差分析:
70、比较实测数据与0值,得到:
71、x轴陀螺输出平均为0.1°/s,说明存在0.1°/s的漂移误差,z轴加速度计输出平均值为0.05m/s2,说明存在0.05m/s2的零偏误差;
72、步骤2-3-3,imu误差模型:
73、在matlab中构建imu仿真模型,输入理论静止状态,并在imu仿真模型中加入误差源:
74、x轴陀螺漂移误差源:增加一个0.1°/s的随机漂移值;
75、z轴加速度计零偏误差源:增加一个0.05m/s2的常值误差;
76、运行imu仿真模型,输出的数据为添加误差源后的imu预期输出;
77、步骤2-3-4,结果验证:将imu仿真模型输出的数据与实测静止状态数据进行比对,计算误差,如果误差满足要求,说明建立的imu误差模型能够描述实际imu的误差源与特征;如果误差较大(当imu性能参数恶化、运动的状态复杂、使用时时间过长都会使得imu输出误差较大),调整imu仿真模型中的误差源参数,如陀螺漂移改为0.08°/s,零偏改为0.04m/s2,直到误差减小到可接受程度;
78、步骤2-3-5,动态条件扩展:重复步骤2-3-3与步骤2-3-4,得到描述imu在人行走与不同姿态状态下的imu仿真模型,通过步骤2-3-3得到静止状态模型,通过重复步骤2-3-3~步骤2-3-4,得到动态条件模型,将动态条件模型与静止状态模型集成,得到描述多种工作条件下(包括静止状态、运动状态、不同方向、不同姿态、不同运动模式、不同环境以及上述状态的组合,形成的更复杂工作条件)imu误差特性的imu误差模型(imu仿真模型是构建imu误差模型的基础和中间步骤。imu误差模型是在仿真模型的基础上,通过与实测数据比较和调整的参数得到的,用来描述imu误差特征的模型)。
79、步骤2-4包括:
80、步骤2-4-1,5g小基站测试:在测试环境下测试4个5g小基站的以下参数:
81、房间位置:
82、小基站1位于办公室东南角,坐标为(x1,y1);
83、小基站2位于办公室西北角,坐标为(x2,y2);
84、小基站3位于办公室中央,坐标为(x3,y3);
85、小基站4位于办公室西南角,坐标为(x4,y4);
86、发射方向:
87、小基站1的主要发射方向朝东;
88、小基站2的主要发射方向朝西;
89、小基站3和小基站4的发射方向朝向办公室中央;
90、发射功率:
91、小基站1发射功率为100mw;
92、小基站2发射功率为200mw;
93、小基站3发射功率为150mw;
94、小基站4发射功率为180mw;
95、定位误差:在每个小基站覆盖区域内随机选取x3个测试点(x3为可配置的正整数),采集5g信号与imu、wifi定位信息计算位置,与理论坐标比对得到定位误差;
96、步骤2-4-2,5g环境模型:
97、在matlab中构建测试环境的3d的5g环境模型,添加4个小基站在房间的位置与坐标、发射方向与功率参数,运行5g环境模型能够显示每个小基站的理论覆盖范围与信号强度分布图;
98、步骤2-4-3,5g误差模型:
99、在理论覆盖范围内的各点,根据测试结果分配一个定位误差值,5g误差模型描述了每个小基站定位误差的空间分布;
100、步骤2-4-4,建立5g综合环境与误差模型:
101、将5g环境模型与5g误差模型集成到同一个matlab模型中,得到5g综合环境与误差模型。
102、步骤3包括:
103、步骤3-1,获取原始定位信息;
104、步骤3-2,通过信息融合定位算法进行计算。
105、步骤3-1包括:
106、步骤3-1-1,wifi定位:获取wifi ap的rssi值,利用wifi路径损耗模型计算出与每个ap的距离,计算设备位置;
107、步骤3-1-2,解算imu姿态:获取imu输出的陀螺与加速度数据,采用卡尔曼滤波算法计算出设备的当前姿态角与位置增量信息;
108、步骤3-1-3,5g定位:获取设备连接的5g小基站id,根据5g综合环境与误差模型,初步得到设备所在位置和预期定位误差。
109、步骤3-2中,所述信息融合定位算法的输入包括:原始的wifi、imu与5g定位信息;环境信息模型、imu仿真模型与5g综合环境与误差模型所提供的先验信息;
110、步骤3-2-1,利用环境信息模型与5g综合环境与误差模型对wifi与5g定位信息进行环境误差补偿,得到优化后的位置信息;
111、步骤3-2-2,imu信息优化:利用imu仿真模型对imu输出的姿态与位置增量信息进行误差补偿,得到优化后的姿态与位置更新信息;
112、步骤3-2-3,多源信息融合:将优化后的位置信息、姿态与位置更新信息进行卡尔曼滤波融合,同时利用环境信息模型、imu仿真模型与5g综合环境与误差模型对滤波过程进行辅助,得到设备最终的三维空间定位信息,具体包括:
113、步骤3-2-3-1,通过环境信息模型与5g综合环境与误差模型对wifi与5g原始定位结果进行优化,得到(x1,y1,z1)与(x2,y2,z2),(x1,y1,z1)是5g的三维定位坐标,(x2,y2,z2)是wifi的三维定位坐标;
114、x1表示设备的东西方向坐标,一般单位为米;y1表示设备的南北方向坐标,一般单位也为米;z1表示设备的垂直高度坐标,一般单位为米;(x1,y1,z1)作为三维空间直角坐标系中的位置向量,可以唯一确定设备在三维空间中的位置;
115、步骤3-2-3-2,通过imu仿真模型对imu输出的姿态与位置增量进行优化,得到设备前两秒的位置变化(x3,y3,z3);(x3,y3,z3)是imu的三维定位坐标;
116、步骤3-2-3-3,定义卡尔曼滤波器状态量xk=[x,y,z,φ,θ,ψ,vx,vy,vz]t,其中(x,y,z)为位置坐标,(φ,θ,ψ)为姿态角,其中φ为横滚角,表示围绕x轴的旋转角度,θ为俯仰角,表示围绕y轴的旋转角度,ψ为航向角,表示围绕z轴的旋转角度;v为速度;t表示矩阵的转置;vx为x轴方向的速度分量;vy为y轴方向的速度分量;vz为z轴方向的速度分量;
117、步骤3-2-3-4,根据imu输出构建设备运动学方程:
118、xk=axk-1+buk-1+wk-1,
119、更新协方差p'k=apk-1at+q;
120、其中a为状态转移矩阵,根据imu输出的角速度与加速度,建立机动学方程,推算出当前状态xk与上一状态xk-1之间的映射关系;
121、b为输入矩阵,q为系统噪声协方差,xk-1表示上一时刻的状态向量,在初始化时设置为初始状态x0;uk-1为imu的角速度与加速度输出,通过矩阵b将uk-1转化为对应于状态量xk的增加量;pk-1为上一时刻的协方差;
122、步骤3-2-3-5,设置zk=[x1,y1,z1,x2,y2,z2]t作为观测值,建立观测方程:
123、zk=hxk+vk,
124、其中h为观测矩阵,vk为观测噪声;
125、步骤3-2-3-6,卡尔曼滤波,包括如下步骤:
126、步骤3-2-3-6-1,设置初始状态x0=[x0,y0,z0,0,0,0,0,0,0]t,p0为初始协方差;x0是初始化时设备的x轴方向的位置坐标;y0是初始化时设备的y轴方向的位置坐标;z0是初始化时设备的z轴方向的位置坐标;x0是初始状态向量,包含位置、姿态角和速度的初始值;
127、步骤3-2-3-6-2,利用设备运动学方程计算x'k与p'k;x'k是预测状态向量,表示利用系统模型根据前一状态预测出的当前状态估计值;p'k是预测误差协方差矩阵,表示根据系统模型预测出的当前状态误差协方差矩阵;
128、步骤3-2-3-6-3,计算观测残差yk=zk-hx'k,更新增益kk,计算最优状态估计xk=x'k+kkyk,更新pk;
129、步骤3-2-3-6-4,设置xk为下次迭代的初始值,重复步骤3-2-3-6-2~步骤3-2-3-6-3;
130、步骤3-2-3-7,结果输出:迭代n次后,输出xk=[x,y,z,φ,θ,ψ]t作为设备的三维空间定位与姿态信息。
131、步骤4包括:
132、步骤4-1,wifi定位结果(x1,y1,z1)在wifi坐标系下,5g定位结果(x2,y2,z2)在5g基站坐标系下,imu输出的位置增量在设备自身坐标系下;
133、步骤4-2,选择一个测试环境下的参考坐标系;
134、步骤4-3,wifi坐标系与参考坐标系之间的转换关系为:
135、(xr,yr,zr)=rr2w(x1,y1,z1)+tr2w
136、其中,(xr,yr,zr)为参考坐标系下的坐标;rr2w为wifi坐标系与参考坐标系之间的旋转矩阵,tr2w为wifi坐标系原点在参考坐标系下的位置向量;
137、步骤4-4,5g小基站坐标系与参考坐标系之间的转换矩阵为rr2g,原点偏移量tr2g;
138、步骤4-5,imu输出的位置增量(δx,δy,δz)在设备自身坐标系下,通过设备在参考坐标系下的初始位置(x0,y0,z0)和初始姿态,将imu输出的位置增量(δx,δy,δz)转换到参考坐标系下,具体包括:
139、步骤4-5-1,定义设备初始在参考坐标系下的姿态为欧拉角(yaw0,pitch0,roll0),其中yaw0表示初始状态下的偏航角,pitch0表示初始状态下的俯仰角,roll0表示初始状态下的滚转角;
140、步骤4-5-2,构建从设备自身坐标系到参考坐标系的旋转转换矩阵r:
141、r=r_yaw(yaw0)*r_pitch(pitch0)*r_roll(roll0)
142、其中r_yaw是横滚角旋转矩阵,r_pitch是俯仰角旋转矩阵,r_roll是航向角旋转矩阵;
143、步骤4-5-3,进行坐标转换:
144、(δxr,δyr,δzr)=r*(δx,δy,δz)
145、其中δxr是imu位置增量δx经r矩阵转换到参考坐标系后的值,δyr是imu位置增量δy经r矩阵转换到参考坐标系后的值;δzr是imu位置增量δz经r矩阵转换到参考坐标系后的值;
146、步骤4-5-4,初始位置为(x0,y0,z0),转换后的imu输出为:
147、(δxr+x0,δyr+y0,δzr+z0);
148、步骤4-6,综合wifi定位结果(xr1,yr1,zr1)、5g定位结果(xr2,yr2,zr2)与imu输出(δxr,δyr,δzr),得到设备在参考坐标系下的位置(x,y,z);
149、对于姿态信息,需要将不同来源的姿态表示转换到统一的欧拉角或四元数表示,进行融合优化,具体包括:
150、步骤4-6-1,imu输出的欧拉角姿态θ_imu为:
151、θ_imu=[yaw1,pitch1,roll1]
152、其中yaw1表示imu输出的偏航角,pitch1表示imu输出的俯仰角,roll1表示imu输出的滚转角;
153、步骤4-6-2,5g相位跟踪获得的相对角度变化量δθ_5g为:
154、δθ_5g=[δyaw,δpitch,δroll]
155、其中δyaw表示5g相位跟踪获得的偏航角变化量,δpitch表示5g相位跟踪获得的俯仰角变化量,δroll表示5g相位跟踪获得的滚转角变化量;
156、步骤4-6-3,将5g的相对变化量转换到绝对姿态角:
157、θ_5g=θ_5g'+δθ_5g
158、θ_5g表示通过5g相位跟踪得到的设备的绝对姿态角,包含yaw角、pitch角和roll角;θ_5g'表示上一时刻设备的绝对姿态角;
159、步骤4-6-4,wifi通过到达角aoa(angle of arrival)直接测量得到的欧拉角为:
160、θ_wifi=[yaw2,pitch2,roll2],
161、其中yaw2表示wifi通过到达角aoa直接测量得到的偏航角,pitch2表示wifi通过到达角aoa直接测量得到的俯仰角,roll2表示wifi通过到达角aoa直接测量得到的滚转角;
162、步骤4-6-5,在欧拉角表示下,姿态融合的加权算法为:
163、θ_fuse=w1θ_imu+w2θ_5g+w3*θ_wifi
164、其中w1、w2、w3是权重参数,权重参数满足:
165、w1+w2+w3=1
166、步骤4-6-6,四元数表示下,设q_imu,q_5g,q_wifi分别为imu、5g、wifi三种源的姿态四元数,融合算法为:
167、
168、其中q_fuse表示融合后的四元数姿态;q_imu表示imu计算所得的四元数姿态;q_5g表示5g相位跟踪所得的四元数姿态;q_wifi表示wifi天线阵列所测量的四元数姿态;conjugate(q_imu)表示q_imu的共轭四元数;表示四元数乘法,*表示共轭;
169、步骤4-6-7,通过重复步骤4-6-1~步骤4-6-6,得到设备的最终姿态结果。
170、有益效果:单一的定位技术如(5g/wifi/imu)虽然系统简单,易于实现,但是定位精度较差,难以满足高精度定位需求,受某一因素的限制和影响较大;鲁棒性差,容易受到环境变化的影响,如信号遮挡、多径效应等;适用场景受限,某些场合无法正常工作。而本发明采用多源定位融合(5g+wifi+imu),其定位精度高,可以实现亚米级精度,满足大多数高精度定位应;鲁棒性强,即使某一源失效,仍可正常定位;适用广泛,几乎适用于任何室内场景。
- 还没有人留言评论。精彩留言会获得点赞!