轨道3D几何形态高频监测系统及方法与流程
本发明涉及轨道交通,具体涉及一种轨道3d几何形态高频监测系统及方法。
背景技术:
1、在公共交通领域,轨道交通占据着重要的地位。目前铁路和城市轨道交通不断向高速度、大运量等方向发展,轨道作为轨道交通的基础设施,其稳定性与安全性对保障列车安全运行至关重要。随着轨道荷载的不断增加和路基或者隧道的沉降变形,会导致轨道的几何形态随之改变,严重影响轨道结构的稳定平顺性和使用性能,较高的轨道不平顺性会导致列车在行驶过程中产生颠簸和振动,可能引发设备故障或列车脱轨,对乘客和工作人员的安全构成威胁。因此,轨道几何形态监测对列车的安全运行显得尤为重要。
2、轨道几何形态监测常用的方法有人工巡检和专业检测设备两种类型。人工巡检是指利用人工视觉或者简单的测量工具对轨道进行定期检查,评估轨道的偏差和损坏情况。这种方法操作简单、成本低廉,但效率低、精度差、监测频率有限无法实时监测、数据处理难度大等问题。专业检测设备是指利用专门设计的仪器或者车辆对轨道进行定期或者连续检测,获取轨道的各项参数和指标。这种方法效率高、精度高、监测频率高可以实时监测、数据处理难度低等优点。
3、目前已有多种专业检测设备用于轨道几何形态监测,例如,中国专利cn101021417a公开了一种长直轨道几何参数的摄像测量方法,该专利中,通过在线路检测车前方安装摄像机,当线路检测车沿所述轨道运动时,用摄像机拍摄随该轨道起伏偏转而运动的所述合作标志在至少两个不同时刻的图像,通过图像处理获得轨道的几何参数 。这种监测装置可以快速、准确地获取轨道相关参数 ,但其需要专门的车辆来安装仪器,增加了设备的使用成本和维护难度,也无法对监测段轨道进行连续、高频、实时的几何形态监控测量。
技术实现思路
1、本发明提出一种轨道3d几何形态高频监测系统及方法,解决现有轨道几何形态监测系统及方法对轨道的监测效率低、监测范围有限、监测精度不高、监测实时性不足等问题。
2、为了达到上述目的,本发明所采用的技术方案为:
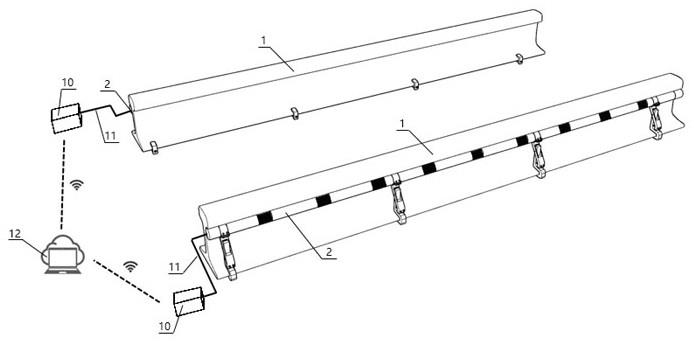
3、轨道3d几何形态高频监测系统,包括固定顶紧装置、线性位移传感器、数据采集器和运算中心;所述固定顶紧装置将所述线性位移传感器顶紧在监测段轨道的腰部上缘;所述线性位移传感器沿监测段轨道的全长度布置;所述数据采集器与所述线性位移传感器电连,采集所述线性位移传感器输出的信号;所述运算中心与所述数据采集器通信连接,接收所述数据采集器采集的信号,计算所述监测段轨道的3d几何形态。
4、进一步的,在监测段轨道的上下行轨道上分别设置线性位移传感器,所述线性位移传感器包括若干节依次连接的测量单元,测量单元包括壳体和设置在壳体内的加速度传感器。
5、进一步的,所述固定顶紧装置包括多组顶紧单元,多组顶紧单元间隔设置,多组顶紧单元在监测段轨道的全长度方向顶紧线性位移传感器;所述顶紧单元包括固定基座、固定支杆和卡箍,所述固定基座与监测段轨道的轨底固定,固定基座的向上伸出基座铰杆,基座铰杆位于轨道的腰部一侧;所述固定支杆的中部铰接在基座铰杆上,固定支杆的上端设置所述卡箍,卡箍连接所述线性位移传感器,固定支杆的下部设置位置限定弹簧,位置限定弹簧为固定支杆的下部提供反推力,通过铰接为固定支杆的上端提供向监测段轨道的腰部上缘持续顶力。
6、进一步的,所述固定基座的下部与监测段轨道的轨底外轮廓结构相同,固定基座扣合在轨底外部后,通过一侧的固定卡扣和固定螺母紧固;在固定卡扣和固定螺母之间设置减震垫片。
7、进一步的,所述运算中心为云平台,数据采集器通过无线通信与云平台连接。
8、另一方面,本发明涉及轨道3d几何形态高频监测方法,包括:
9、固定顶紧装置将线性位移传感器紧贴在监测段轨道的腰部上缘,线性位移传感器沿监测段轨道的全长度布置;
10、线性位移传感器包括若干节依次连接的测量单元,每节测量单元均包括外壳和设置在外壳内的加速度传感器;每节测量单元监测本节测量单元的变形位移量,进而计算监测段轨道的全长度变形位移量;
11、数据采集器将监测段轨道的全长度变形位移量发送至运算中心,计算监测段轨道的纵向高差、纵向变形曲率半径、纵向变形相对曲率、轨间距变形和轨道横向高差。
12、进一步的,以测量单元的长度方向为x轴建立坐标系,各方向的变形位移量计算如下:
13、单节测量单元z轴方向,即纵向变形量△z,△z= lsinβ=lsin(90-θ);监测段轨道的全长度纵向变形位移量,即纵向高差z :z=∑lsinβn=∑lsin(90-θ)n;
14、单节测量单元y轴方向,即横向变形量△y,△y=l(1-cosβ)= l(1-cos(90-θ));监测段轨道的全长度横向变形位移量y:y=∑l(1-cosβn)=∑l(1-cos(90-θ)n);
15、上式中,l为单节测量单元的长度,n为测量单元节数,θ为单节测量单元对应轴与重力方向夹角,β为单节测量单元对应轴与y轴夹角。
16、进一步的,纵向变形曲率半径计算方法如下:
17、取每个断面轨道长度为dn,纵向变形量为△z,可知,求得纵向变形曲率半径r:
18、纵向变形相对曲率计算方法如下:
19、取监测段轨道总长度为d,求得变形相对曲率ε:。
20、进一步的,在监测段轨道的上下行轨道上分别设置线性位移传感器,在上下行轨道的相同断面位置,监测上行监测段轨道y轴方向变形量为△y1,监测下行监测段轨道y轴方向变形量为△y2,得上下行监测段轨道的轨间距变形为△y1+△y2。
21、进一步的,在监测段轨道的上下行轨道上分别设置线性位移传感器,在上下行轨道的相同断面位置,监测上行监测段轨道z轴方向变形量为△z1,监测下行监测段轨道z轴方向变形量为△z2,得上下行监测段轨道的轨道横向高差为|△z1-△z2|。
22、与现有技术相比,本发明的有益效果如下:
23、1.本发明实施例监测系统,线性位移传感器沿监测段轨道的全长度布置,以实现对轨道测量的覆盖率和精度;线性位移传感器由若干节依次连接的测量单元组成,形成一个连续的链路,线性位移传感器可以根据需要设置不同的长度和节数,以适应不同需求的监测段轨道。
24、2.本发明实施例监测系统,通过调整固定顶紧装置的位置限定弹簧的松紧程度使线性位移传感器紧贴于轨道,同时利用位置限定弹簧避免列车运行过程中产生的震动使线性位移传感器滑落,保证线性位移传感器始终紧贴于轨道,提高监测精度,确保监测数据实时、准确反映出轨道3d几何形态。
25、3.本发明实施例监测系统和方法,无需进行人工巡检和数据处理,可高效、准确、实时、连续监测段轨道几何形态,降低轨道形态监测的工作量和成本,为运营人员提供数据驱动的决策支持,优化维护计划和资源分配。
26、4.本发明实施例监测方法,根据线性位移传感器采集数据,计算获得监测段轨道的纵向高差、纵向变形曲率半径、纵向变形相对曲率、轨间距变形、轨道横向高差等数据,对轨道的三维几何形态进行分析和评估,判断轨道是否存在超限或异常情况,展示可视化结果,并及时发出预警或报警信号。
27、当然的,实施本发明的各技术方案并不一定需要同时达到以上所述的所有优点。
- 还没有人留言评论。精彩留言会获得点赞!