基于等距虚拟面视差法监测线型建构筑物动态变形的方法
本发明涉及线型建构筑物动态变形研究,尤其涉及基于等距虚拟面视差法监测线型建构筑物动态变形的方法。
背景技术:
1、大尺寸线型建(构)筑物受超长荷载、材料老化、构件缺陷等因素作用,结构将逐渐产生损伤累积,从而使结构的承载能力降低,在受到强风、地震等荷载作用时,会造成难以估量的生命与财产的损失。因此,必须实时对线型建(构)筑物进行健康监测,了解其运营期间的运动状态,及时发现潜在的安全隐患,为加固设计提供参考数据。
2、常见的建(构)筑物变形监测的方法有全站仪、加速度计传感器、数字垂直测量仪、gnss(global navigation satellite system)技术。在这些方法中,全站仪法主要是在建筑物某些特征点上安置棱镜,通过观测棱镜来确定建(构)筑物的形变性质。这种方法监测的采样频率较低,不能做到实时动态监测。加速度计传感器主要是通过安装在建筑物上的传感器来获取建筑物的振动加速度,通过处理加速度数据来获得建筑物的位移变化。这两种方法在测量前都需要与建筑物进行直接接触,在面对一些特殊建筑(如大尺寸线型建(构)筑物)时,棱镜或者传感器安装均较为困难,不能提供准确的形变特性,会对监测精度造成较大影响。数字垂直测量仪是通过建筑物楼板的预留孔作为安装通道,通过记录建筑的振荡规律来得到形变特性的。但是在监测期间容易受到施工因素、风荷载等因素的影响。上述三种方法均无法实现对大尺寸线型建(构)筑物的连续实时动态监测。随着gnss技术的定位精度逐渐提高以及处理方式的逐渐成熟,gnss方法开始被广泛应用于大尺寸线型建(构)筑物变形监测领域,具有代表性的工程有基于gnss技术的广州塔和天津117塔变形监测。但是,塔吊作业会遮挡gnss信号、钢结构所引起的多路径效应以及振动和风荷载会产生严重的噪声,这就导致gnss信号中会含有较多的噪声数据,严重影响了对大尺寸线型建(构)筑物的变形特性的准确提取。上面的四种方法只能通过几个特征点来反映建筑物的变形性质,无法从整体上对建筑物进行有效的监测和分析。而且上述测量方法需要与建筑物产生物理接触,在监测施工中的建筑物或一些特殊的建筑物时存在一定的安全隐患。
技术实现思路
1、针对上述存在的问题,本发明旨在提供基于等距虚拟面视差法监测线型建构筑物动态变形的方法,在常规位移视差法的基础上,提出了一种适用于超远距离局部监测的基于等距虚拟面视差法的近景远用测量技术,该技术将摄影设备与小孔成像调焦放大装置组合成监测装置,利用等距虚拟面法将控制平面内置于数据处理软件中形成固定背景,再利用同名点匹配的原理测量被监测结构的相对变形;具有低成本,操作安全,简单易行,数据处理效率高等优势。
2、为了实现上述目的,本发明所采用的技术方案如下:
3、基于等距虚拟面视差法监测线型建构筑物动态变形的方法,其特征在于,包括以下步骤,
4、s1:将摄像设备与小孔成像调焦放大设备组成监测装置;
5、s2:基于等距虚拟面法原理布设控制点;
6、s3:使用监测装置对控制点和待监测线型建构筑物进行拍摄;
7、s4:处理含有控制点的像片形成等距虚拟面,将等距虚拟面作为固定背景并依次添加线型建构筑物像片;
8、s5:基于等距虚拟面视差法对待监测线型建构筑物的变形进行计算。
9、进一步的,步骤s2的具体操作包括以下步骤,
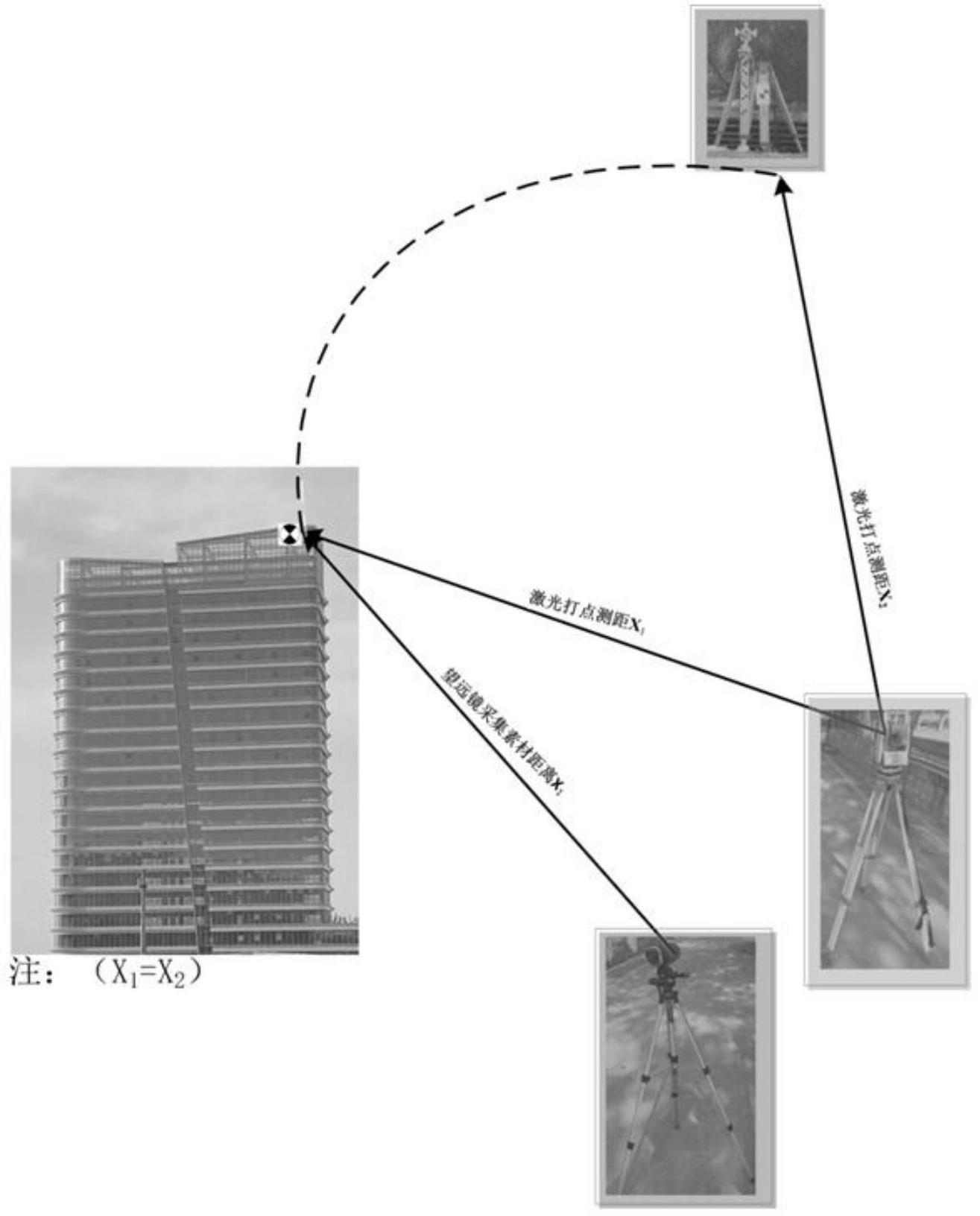
10、s201:使用全站仪的无棱镜打点测出待监测线型建构筑物变形点的距离x1;
11、s202:架设贴有标志物的棱镜架,以及贴有标志物的三脚架,标志物作为控制点;
12、s203:调整棱镜架和三脚架的位置,使用全站仪打点,使棱镜架上的棱镜至全站仪的距离x2=x1。
13、进一步的,步骤s4的具体操作包括以下步骤,
14、s401:将含有控制点的像片导入pr软件作为底片;
15、s402:选取一张纯色像片,将纯色像片导入底片中,并调整纯色像片的长宽直至变成线条;
16、s403:将纯色线条调整至控制点附近,重复操作,直至线条围绕所有需要标记的控制点,然后将含有控制点的像片删除,得到等距虚拟面;
17、s404:将等距虚拟面作为固定背景并依次添加线型建构筑物像片,对控制点和监测点进行标记。
18、进一步的,步骤s5中等距虚拟面视差法的具体操作包括以下步骤,
19、s501:计算待监测线型建构筑物像片上变形点在等距虚拟面上的水平位移和竖直位移;
20、s502:采用固定不动的等距虚拟面进行零像片和后继像片的匹配;
21、s503:计算由零像片和后继像片内外方位元素的变化引起的参考点视差;
22、s504:计算变形点的系统误差;
23、s505:计算变形点的视差改正值和位移改正值。
24、进一步的,步骤s501中变形点在等距虚拟面上的水平位移和竖直位移分别为
25、
26、式中,q为等距虚拟面的摄影比例尺,和分别是相应变形点在像片上的水平和竖直方向的视差值,
27、
28、其中,点和点分别为零像片和后继像片上的同名点,和分别为同名变形点在零像片和后继像片上的系统误差。
29、进一步的,步骤s502中参考平面由至少3个不在同一条直线上的参考点组成,由于参考点是固定不动的,因此
30、
31、式中,和分别是同名参考点在零像片和后继像片上的坐标;和分别是相应同名参考点在零像片和后继像片上的系统误差。
32、进一步的,步骤s503中由零像片和后继像片内外方位元素的变化引起的参考点视差为
33、
34、式中,是像片内外方位元素,是相对于零像片的内外方位元素变化值。是参考点像点坐标的函数,是后继像片自身的内外方位元素,为参考点在像平面上的视差值,为像片自身内外方位元素变化和综合引起的视差。
35、进一步的,步骤s504的具体操作包括以下步骤,
36、s5041:确定系统误差
37、
38、忽略二项式,得
39、
40、式中,bx=δk,(ax,bx)和(az,bz)分别是x和z方向的视差系数,(cx,dx)分别是x和z方向的系统误差系数,(xct,zct)是参考点在像平面上的坐标;
41、s5042:像点坐标重心化后,得到参考点在重心化坐标系中的坐标(xct′,zct′)和系统误差当仅含有偶然误差时,
42、
43、s5043:根据s5042中的误差方程,分别得到x方向的视差系数(ax,bx)和z方向的视差系数(az,bz),从而得到变形点的系统误差为
44、
45、式中,(xdf′,zdf′)和分别是变形点在重心化坐标系中的坐标和系统误差。
46、进一步的,步骤s505中变形点的视差改正值为:
47、
48、式中,为变形点在重心化坐标系中的视差改正值;
49、根据参考平面得到变形点的位移改正值为
50、
51、式中,为变形点在参考平面上的位移改正值。
52、本发明的有益效果是:
53、1、本发明中监测线型建构筑物动态变形的方法将摄影设备与小孔成像调焦放大装置组合成监测装置,利用等距虚拟面法将控制平面内置于pr软件中形成固定背景,再利用同名点匹配的原理测量被监测结构的相对变形,解算出变形监测点的相对位移值(即大尺寸线型建(构)筑物的沉降与倾斜度);具有低成本,操作安全,简单易行,数据处理效率高等优势。
54、2、本发明中基于摄影比例变化的等距虚拟面视差法丰富了传统时间基线视差法的基本理论,同时在数字摄影测量技术领域内创新了屏幕网格法(通过将纯色直线围绕在控制点之间,从而使其中摄影比例关系的问题进行了有效的避免),提高了超视距下的成果可靠性,在大尺寸线型建(构)筑物的沉降与倾斜变形监测中具有广阔的应用前景。
- 还没有人留言评论。精彩留言会获得点赞!