无人机定位方法、装置、系统和存储介质与流程
本发明涉及无人机,具体涉及一种无人机定位方法、装置、系统和存储介质。
背景技术:
1、基于光流传感器定位算法是一种常用、成本低的无人机自主定位方法。在不需要gps的情况下,在无人机底部安装光流传感器实时采集图像数据,基于图像数据中亮度图案的表观速度,并通过光流算法计算间隔图像的位移,实现自主定位。然而仅靠光流定位存在误差大、效率低以及定位不准等问题。
技术实现思路
1、鉴于上述问题,提出了本发明以便提供一种克服上述问题或者至少部分地解决上述问题的无人机定位方法、装置、系统和存储介质。
2、依据本发明的一个方面,提供了一种无人机定位方法,所述方法包括:
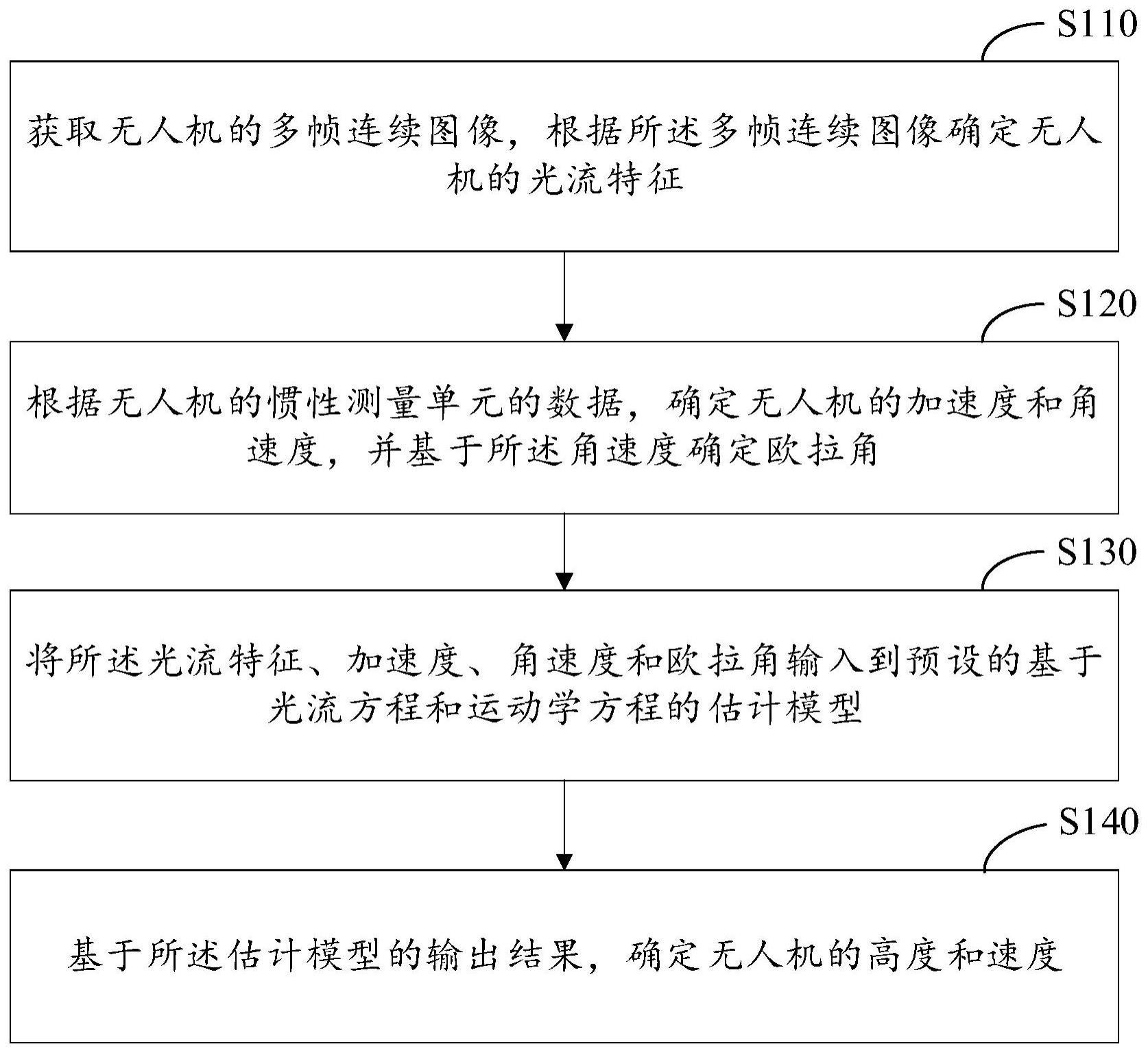
3、获取无人机的多帧连续图像,根据所述多帧连续图像确定无人机的光流特征;
4、根据无人机的惯性测量单元的数据,确定无人机的加速度和角速度,并基于所述角速度确定欧拉角;
5、将所述光流特征、加速度、角速度和欧拉角输入到预设的基于光流方程和运动学方程的估计模型;
6、基于所述估计模型的输出结果,确定无人机的高度和速度。
7、在一些实施方式中,获取无人机的多帧连续图像,根据所述多帧连续图像确定无人机的光流特征包括:
8、基于图像像素点的强度确定图像平面中单个像素点的速度;
9、基于多个像素点的速度确定所述图像中特征的移动速度。
10、在一些实施方式中,预设的基于光流方程和运动学方程的估计模型的构建步骤包括:
11、基于图像平面的特征,构建包括无人机高度参数和速度参数的估计模型;
12、针对惯性坐标系、机身坐标系和相机坐标系,分别确定无人机的角速度、线速度、高度和欧拉角在各坐标系中的表达式;
13、基于光流特征、加速度、角速度和欧拉角的实时值和各所述表达式,对所述估计模型进行状态估计,以得到无人机高度和速度的估计值。
14、在一些实施方式中,分别确定无人机的角速度、线速度和高度在各坐标系中的表达式还包括:
15、将某一坐标系下的表达式向其他不同的坐标系进行转化,得到其他坐标系下的表达式。
16、在一些实施方式中,对所述估计模型进行状态估计包括:
17、基于各所述表达式和/或各表达式的时间导数,利用雅可比矩阵表示所述估计模型;
18、基于所述雅可比矩阵,利用扩展卡尔曼滤波器进行状态估计。
19、在一些实施方式中,所述方法还包括:
20、对无人机的惯性测量单元进行预校准,以确定陀螺仪和加速计的比例因子、偏差和/或未对准误差。
21、在一些实施方式中,基于所述角速度确定欧拉角包括:
22、基于姿态和航向参考系统的算法对所述角速度进行积分,确定所述欧拉角。
23、依据本发明的另一个方面,提供了一种无人机定位装置,所述装置包括:
24、光流特征确定模块;适于获取无人机的多帧连续图像,根据所述多帧连续图像确定无人机的光流特征;
25、惯性特征确定模块,适于根据无人机的惯性测量单元的数据,确定无人机的加速度和角速度,并基于所述角速度确定欧拉角;
26、模型估计模块,适于将所述光流特征、加速度、角速度和欧拉角输入到预设的基于光流方程和运动学方程的估计模型;
27、结果确定模块,适于基于所述估计模型的估计结果,确定无人机的高度和速度。
28、依据本发明的又一方面,提供了一种无人机定位系统,包括:无人机平台、图像传感器和机载图像处理板,所述图像传感器和所述机载图像处理板设置在所述无人机平台上;
29、所述机载图像处理板包括处理器以及被安排成存储计算机可执行指令的存储器,所述可执行指令在被执行时使所述处理器执行根据上述实施方式中任一项所述的无人机定位方法。
30、依据本发明的再一方面,提供了一种计算机可读存储介质,其中,所述计算机可读存储介质存储一个或多个程序,所述一个或多个程序当被处理器执行时,实现根据上述中任一项无人机定位方法。
31、由上述可知,根据本发明公开的上述技术方案,使用imu测量数据和相机拍摄的图像序列来估计无人机uav的速度矢量和垂直距离,特别适用于紧急情况和gps拒绝的环境中。在估计过程中,上述技术方案将被跟踪特征的光流方程与uav运动的运动学方程相结合,提供了多特征跟踪的能力,以提高估计的性能。
32、并且,所提出的方法结合了图像平面中的uav动态和检测到的特征动态,以估计速度矢量和垂直距离,而不依赖于距离测量传感器,例如激光测距仪或超声波传感器。
33、进一步的,上述方法仅需要无人机图像、uav的角速度和加速度,而这些能够从图像传感器以及uav的飞行控制器(imu)获得,提高了效率并降低了设备和运行成本。
34、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
技术特征:
1.一种无人机定位方法,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,获取无人机的多帧连续图像,根据所述多帧连续图像确定无人机的光流特征包括:
3.根据权利要求1所述的方法,其特征在于,预设的基于光流方程和运动学方程的估计模型的构建步骤包括:
4.根据权利要求3所述的方法,其特征在于,分别确定无人机的角速度、线速度和高度在各坐标系中的表达式还包括:
5.根据权利要求3所述的方法,其特征在于,对所述估计模型进行状态估计包括:
6.根据权利要求1-5中任一项所述的方法,其特征在于,所述方法还包括:
7.根据权利要求1-5中任一项所述的方法,其特征在于,基于所述角速度确定欧拉角包括:
8.一种无人机定位装置,所述装置包括:
9.一种无人机定位系统,其特征在于,包括:无人机平台、图像传感器和机载图像处理板,所述图像传感器和所述机载图像处理板设置在所述无人机平台上;
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储一个或多个程序,所述一个或多个程序当被处理器执行时,实现根据权利要求1-7中任一项所述的无人机定位方法。
技术总结
本发明公开了一种无人机定位方法、装置、系统和存储介质,所述方法包括:获取无人机的多帧连续图像,根据所述多帧连续图像确定无人机的光流特征;根据无人机的惯性测量单元的数据,确定无人机的加速度和角速度,并基于所述角速度确定欧拉角;将所述光流特征、加速度、角速度和欧拉角输入到预设的基于光流方程和运动学方程的估计模型;基于所述估计模型的输出结果,确定无人机的高度和速度。上述技术方案对飞行中的无人机进行定位的效率高,估计的精度也得到很大的提高,并经过了无人机平台的有效验证。
技术研发人员:任雪峰
受保护的技术使用者:北京卓翼智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!