车辆导航的方法、装置、设备和存储介质与流程
本技术属于自动驾驶,尤其涉及一种车辆导航的方法、装置、设备和存储介质。
背景技术:
1、目前物流配送车主要是在室外配送快递,由于室内gps定位信号弱,不能在办公楼内行驶,且由于办公楼内狭窄走廊的限制,使得车辆进出都在同一条通道上,返回时需要控制车辆倒车或者掉头行驶。
2、而现有的车辆导航方法不能处理进出道路重叠的情况,无法搜索全局最短路径,也不能做到逆向行驶或原地掉头,故而无法实现物流配送车在狭窄通道内的车辆导航。
3、因此,现有技术存在的问题是:无法实现车辆在狭窄通道内的自动导航。
技术实现思路
1、本技术实施例提供了一种车辆导航的方法、装置、设备和存储介质,解决了车辆在狭窄通道内无法自动导航的问题。
2、第一方面,一种车辆导航的方法,其特征在于,该方法包括:
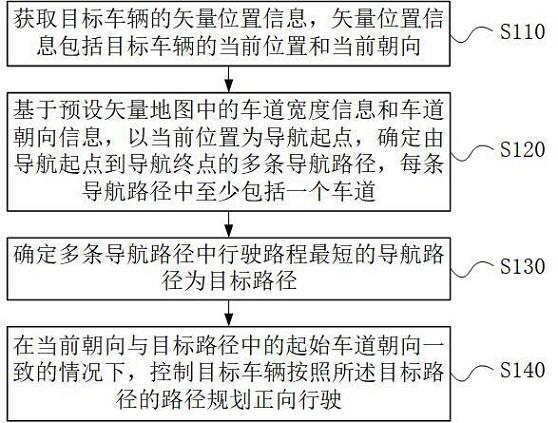
3、获取目标车辆的矢量位置信息,矢量位置信息包括目标车辆的当前位置和当前朝向;
4、基于预设矢量地图中的车道宽度信息和车道朝向信息,以当前位置为导航起点,确定由导航起点到导航终点的多条导航路径,每条导航路径中至少包括一个车道;
5、确定多条导航路径中行驶路程最短的导航路径为目标路径;
6、在当前朝向与目标路径中的起始车道朝向一致的情况下,控制目标车辆按照目标路径的路径规划正向行驶。
7、在一些可能的实现方式中,矢量地图还包括车道是否支持逆向行驶信息,该方法还包括:
8、在当前朝向与目标路径中的起始车道朝向不一致的情况下,判断目标路径中的所有车道是否支持逆向行驶,得到逆向行驶结果;
9、在逆向行驶结果为目标路径中的所有车道均支持逆向行驶的情况下,控制目标车辆按照目标路径的路径规划逆向行驶。
10、在一些可能的实现方式中,矢量地图还包括车道是否支持原地旋转信息,该方法还包括:
11、在逆向行驶结果为目标路径中至少有一条车道不支持逆向行驶的情况下,且目标路径中的起始车道支持原地旋转的情况下,控制目标车辆原地旋转后按照目标路径的路径规划正向行驶。
12、在一些可能的实现方式中,在获取目标车辆的矢量位置信息之前,该方法还包括:
13、获取目标车辆的车载传感器采集的数据信息;
14、基于预设的点云地图,根据车载传感器采集的数据信息,判断目标车辆的当前位置和当前朝向,生成目标车辆的矢量位置信息。
15、在一些可能的实现方式中,当前朝向与目标路径中的起始车道朝向一致包括:当前朝向与目标路径中的起始车道朝向之间的夹角小于或等于90度。
16、在一些可能的实现方式中,在确定多条导航路径中行驶路程最短的导航路径为目标路径之前,该方法还包括:
17、将导航起点与导航终点处于相同导航车道的导航路径,作为待选导航路径;
18、在导航起点到导航终点的第一方向与待选导航路径的车道朝向不一致的情况下,删除待选导航路径。
19、第二方面,本技术实施例还提供了一种车辆导航的装置,该装置包括:
20、获取模块,用于获取目标车辆的矢量位置信息,矢量位置信息包括目标车辆的当前位置和当前朝向;
21、确定模块,用于基于预设矢量地图中的车道宽度信息和车道朝向信息,以当前位置为导航起点,确定由导航起点到导航终点的多条导航路径,每条导航路径中至少包括一个车道;
22、确定模块,还用于确定多条导航路径中行驶路程最短的导航路径为目标路径;
23、控制模块,用于在当前朝向与目标路径中的起始车道朝向一致的情况下,控制目标车辆按照目标路径的路径规划正向行驶。
24、在一些可能的实现中,矢量地图还包括车道是否支持逆向行驶信息,该装置还包括判断模块:
25、判断模块,用于在当前朝向与目标路径中的起始车道朝向不一致的情况下,判断目标路径中的所有车道是否支持逆向行驶,得到逆向行驶结果;
26、控制模块,还用于在逆向行驶结果为目标路径中的所有车道均支持逆向行驶的情况下,控制目标车辆按照目标路径的路径规划逆向行驶。
27、在一些可能的实现中,矢量地图还包括车道是否支持原地旋转信息,该装置还包括:
28、控制模块,还用于在逆向行驶结果为目标路径中至少有一条车道不支持逆向行驶的情况下,且目标路径中的起始车道支持原地旋转的情况下,控制目标车辆原地旋转后按照目标路径的路径规划正向行驶。
29、在一些可能的实现中,在获取目标车辆的矢量位置信息之前,该装置还包括:
30、获取模块,还用于获取目标车辆的车载传感器采集的数据信息;
31、判断模块,还用于基于预设的点云地图,根据车载传感器采集的数据信息,判断目标车辆的当前位置和当前朝向,生成目标车辆的矢量位置信息。
32、在一些可能的实现中,当前朝向与目标路径中的起始车道朝向一致包括:当前朝向与目标路径中的起始车道朝向之间的夹角小于或等于90度。
33、在一些可能的实现中,在确定多条导航路径中行驶路程最短的导航路径为目标路径之前,该装置还包括删除模块:
34、确定模块,还用于将导航起点与导航终点处于相同导航车道的导航路径,作为待选导航路径;
35、删除模块,用于在导航起点到导航终点的第一方向与待选导航路径的车道朝向不一致的情况下,删除待选导航路径。
36、第三方面,本技术实施例还提供了一种设备,该设备包括处理器以及存储有计算机程序指令的存储器;处理器执行计算机程序指令时实现第一方面,或第一方面中的任一可能实现方式中的车辆导航的方法。
37、第四方面,本技术实施例还提供了一种计算机存储介质,计算机可读存储介质上存储有计算机程序指令,计算机程序指令被处理器执行时实现第一方面,或第一方面中的任一可能实现方式中的车辆导航的方法。
38、第五方面,本技术实施例提供了一种计算机程序产品,计算机程序产品中的指令由电子设备的处理器执行时,使得电子设备能够执行第一方面,或第一方面中的任一可能实现方式中的车辆导航的方法。
39、本技术实施例的车辆导航的方法、装置、设备和存储介质,通过获取目标车辆的矢量位置信息(即当前位置和当前朝向),然后基于预设的矢量地图的车道宽度和车道朝向,以当前位置为导航起点,确定由导航起点到导航终点的多条导航路径,其中每条导航路径中至少包括一个车道,接下来在多条导航路径中,将行驶路程最短的导航路径作为目标路径,进而在目标车辆当前朝向与目标路径中的起始车道朝向这两个朝向一致的情况下,按照目标路径的路径规划正向行驶。在上述两个朝向不一致的情况下:满足在目标路径中的所有车道均支持逆向行驶的情况下,则根据路径规划逆向行驶;或者在目标路径中有一个车道不支持逆向行驶的情况下,判断在当前车道支持原地旋转的情况下,原地旋转后按照路径规划正向行驶。从而使物流配送车在狭窄走廊中无法正向行驶的情况下(即进出道路重叠的情况下),通过该方法可以自动控制车辆逆向行驶或者原地旋转后正向行驶,实现了物流配送车在狭窄通道内的自动导航。
- 还没有人留言评论。精彩留言会获得点赞!