一种基于OSM数据的路径规划方法及路径规划系统
本发明涉及导航,尤其涉及一种基于osm数据的路径规划方法及路径规划系统。
背景技术:
1、开放街道图(openstreetmap,简称osm)是一个网上地图协作计划,其目标是创造一个内容自由且能让所有人编辑的世界地图,其osm数据开源,可以自由下载使用。其osm数据携带有包括点(nodes)、路(ways)和关系(relations)的空间数据,这三种元素构成了整个地图画面。类似的,随着高精地图面向自动驾驶应用,autoware推出了lanelet2的格式,其采用xml描述,描述方式精炼,兼具高灵活性,支持自主添加地图标签。但是,由于这些osm数据均存在不能很好的突出路段和其相关属性的问题,并且其作为一个矢量地图数据,道路交叉点与其他点的连接关系难以提取,后续数据处理工作量大,导致目前还没有一种方案能够将这些osm数据直接用于路径规划。
2、此外,目前关于分层分区的路径规划,主要是基于道路等级分层的路径规划,这种路径规划方案不是选择最短路,而是符合人们日常出行,会更愿意选择道路等级更高的道路。但是这种分层方法会存在子图不连通的情况而无法求出最短路。另外,关于区域分块的路径规划主要是基于街区或者是行政区,预先存储区域之间的道路而提高路径规划效率,但是,一方面,由于矢量图的分块没有一个统一的标准,直接的经纬度切分将会破坏道路拓扑结构,另外一方面,区域要分的足够多才能保证路径规划效率的显著提高,但是大量的子区域需要大量的数据存储空间,而且数据预处理时间较长,花费时间和资源较大。
技术实现思路
1、本发明的目的在于提供一种基于osm数据的路径规划方法及路径规划系统。
2、为实现上述发明目的,本发明提供一种基于osm数据的路径规划方法,包括以下步骤:
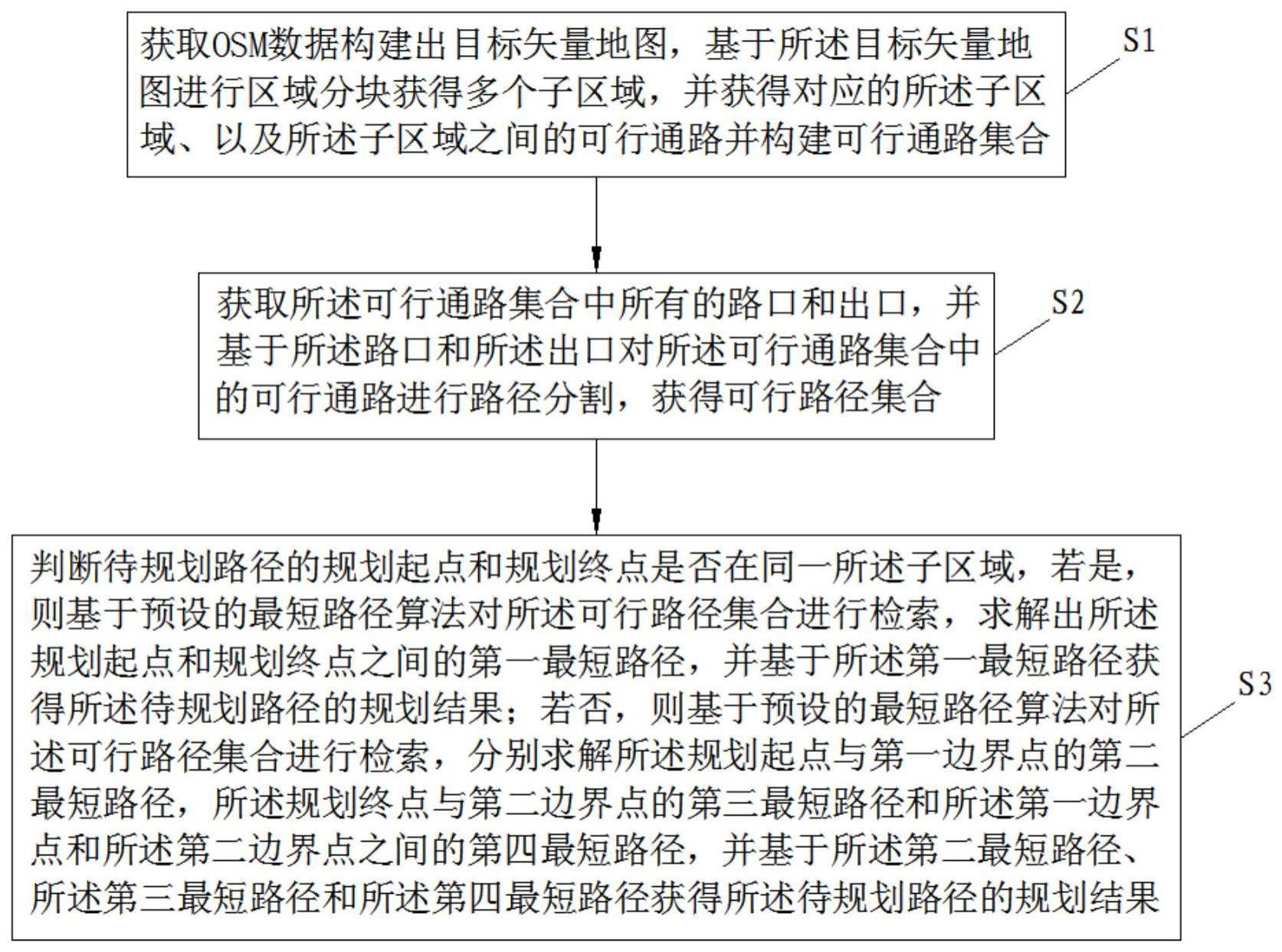
3、s1.获取osm数据构建出目标矢量地图,基于所述目标矢量地图进行区域分块获得多个子区域,并获得对应的所述子区域、以及所述子区域之间的可行通路并构建可行通路集合;
4、s2.获取所述可行通路集合中所有的路口和出口,并基于所述路口和所述出口对所述可行通路集合中的可行通路进行路径分割,获得可行路径集合;
5、s3.判断待规划路径的规划起点和规划终点是否在同一所述子区域,若是,则基于预设的最短路径算法对所述可行路径集合进行检索,求解出所述规划起点和规划终点之间的第一最短路径,并基于所述第一最短路径获得所述待规划路径的规划结果;
6、若否,则基于预设的最短路径算法对所述可行路径集合进行检索,分别求解所述规划起点与第一边界点的第二最短路径,所述规划终点与第二边界点的第三最短路径和所述第一边界点和所述第二边界点之间的第四最短路径,并基于所述第二最短路径、所述第三最短路径和所述第四最短路径获得所述待规划路径的规划结果。
7、根据本发明的一个方面,步骤s1中,基于所述目标矢量地图进行区域分块获得多个子区域,并获得对应的所述子区域、以及所述子区域之间的可行通路并构建可行通路集合的步骤中,包括:
8、提取所述目标矢量地图中的要地节点和边界节点;
9、基于要地节点和所述边界节点,采用最大流最小割算法求解所述可行通路以完成对所述目标矢量地图的区域划分并生成所述可行通路集合。
10、根据本发明的一个方面,步骤s2中,获取所述可行通路集合中所有的路口和出口,并基于所述路口和所述出口对所述可行通路集合中的可行通路进行路径分割,获得可行路径集合的步骤中,包括:
11、s21.遍历所述可行通路集合中的所有所述可行通路,获取所述可行通路中的所有分割节点;
12、s22.再次遍历所述可行通路,判断获取的所述分割节点是否属于路口或出口,若是,则保留并标记为路口或出口;
13、s23.基于保留的所述路口和所述出口对所述可行通路集合中的所述可行通路进行切割,获得所述可行路径集合。
14、根据本发明的一个方面,步骤s22中,再次遍历所述可行通路,判断获取的所述分割节点是否属于路口或出口的步骤中,若所述分割节点不属于路口或出口,则将所述分割节点标记为辅助节点并对其规划优先级进行分配;其中,所述辅助节点用于路径规划的规划优先级低于所述路口和所述出口。
15、根据本发明的一个方面,步骤s3中,若所述待规划路径的规划起点和规划终点处于同一所述子区域,则求解出所述规划起点和规划终点之间的第一最短路径的步骤中包括:
16、判断所述规划起点和所述规划终点是否属于辅助节点,若否,则基于预设的最短路径算法对所述可行路径集合进行检索,求解出所述规划起点和规划终点之间的第一最短路径;
17、若所述规划起点和所述规划终点中的一个属于辅助节点,则求解出所述规划起点和规划终点之间的第一最短路径的步骤中包括:
18、基于与所述辅助节点相邻的所述路口并采用所述最短路径算法求解出第一路径部分;
19、采用所述最短路径算法求解出由所述路口延伸至所述辅助节点的第二路径部分;
20、汇总所述第一路径部分和所述第二路径部分生成所述第一最短路径。
21、根据本发明的一个方面,步骤s3中,若所述待规划路径的规划起点和规划终点处于不同的所述子区域,则求解所述规划起点与第一边界点的第二最短路径的步骤中包括:
22、基于所述规划起点和规划终点搜索出所述第一边界点;
23、判断所述规划起点是否属于辅助节点,若否,则基于预设的最短路径算法对所述可行路径集合进行检索,求解出所述规划起点和所述第一边界点之间的第二最短路径;
24、若所述规划起点属于辅助节点,则求解出所述规划起点与第一边界点的第二最短路径的步骤中包括:
25、基于与所述辅助节点相邻的所述路口并采用所述最短路径算法求解出所述路口与所述第一边界点之间的第三路径部分;
26、采用所述最短路径算法求解出由所述辅助节点延伸至所述路口的第四路径部分;
27、汇总所述第三路径部分和所述第四路径部分生成所述第二最短路径。
28、根据本发明的一个方面,步骤s3中,若所述待规划路径的规划起点和规划终点处于不同的所述子区域,则求解所述规划终点与第二边界点的第三最短路径的步骤中包括:
29、基于所述规划起点和规划终点搜索出所述第二边界点;
30、判断所述规划终点是否属于辅助节点,若否,则基于预设的最短路径算法对所述可行路径集合进行检索,求解出所述规划终点和所述第二边界点之间的第三最短路径;
31、若所述规划终点属于辅助节点,则求解出所述规划终点与第二边界点的第三最短路径的步骤中包括:
32、基于与所述辅助节点相邻的所述路口并采用所述最短路径算法求解出所述路口与所述第二边界点之间的第五路径部分;
33、采用所述最短路径算法求解出由所述辅助节点延伸至所述路口的第六路径部分;
34、汇总所述第五路径部分和所述第六路径部分生成所述第三最短路径。
35、根据本发明的一个方面,所述第一边界点和所述第二边界点采用以下方式获得:
36、以所述规划起点和所述规划终点的连线为基准线,在预定角度阈值内确定出所述第一边界和所述第二边界点。
37、根据本发明的一个方面,步骤s3中,基于预设的最短路径算法对所述可行路径集合进行检索,求解出所述规划起点和规划终点之间最短路径的步骤中,分别以所述规划起点和所述规划终点为计算起点进行双向求解以获得所述最短路径。
38、为实现上述发明目的,本发明提供一种用于前述的路径规划方法的路径规划系统,包括:
39、地图预处理模块,所述地图预处理模块用于构建出所述目标矢量地图,基于所述目标矢量地图进行区域分块获得多个子区域,并获得对应的所述子区域、以及所述子区域之间的可行通路并构建可行通路集合:
40、道路分割模块,所述道路分割模块用于获取所述可行通路集合中所有的路口和出口,并基于所述路口和所述出口对所述可行通路集合中的可行通路进行路径分割,获得可行路径集合;
41、路径搜索模块,所述路径搜索模块用于判断待规划路径的规划起点和规划终点是否在同一所述子区域,若是,则基于预设的最短路径算法对所述可行路径集合进行检索,求解出所述规划起点和规划终点之间的第一最短路径,并基于所述第一最短路径获得所述待规划路径的规划结果;
42、若否,则基于预设的最短路径算法对所述可行路径集合进行检索,分别求解所述规划起点与第一边界点的第二最短路径,所述规划终点与第二边界点的第三最短路径和所述第一边界点和所述第二边界点之间的第四最短路径,并基于所述第二最短路径、所述第三最短路径和所述第四最短路径获得所述待规划路径的规划结果。
43、根据本发明的一种方案,本发明能够在消耗较少量的计算资源的情况下,直接对osm数据格式的大规模路网进行路径规划,其预处理时间短,并且路径搜索效率高。
44、根据本发明的一种方案,通过最大流最小割算法对目标矢量地图进行区域分块处理,得到对应的子区域、以及子区域之间的可行通路集合,可以克服矢量地图中的道路交叉点与其他点的连接关系难以提取,后续数据处理工作量大的问题。并且,在此基础上,通过获取可行通路集合中的所有路口和出口,并基于所述所有路口和出口,对可行通路集合进行路径切割,可以对路径进行优化,缩小路网规模,避免后续进行路径规划的时候,需要遍历太多无意义的节点的问题发生,可以有效的提升规划效率,节省计算资源。
- 还没有人留言评论。精彩留言会获得点赞!