一种基于预测碰撞时间地图的动态环境路径规划方法
本发明涉及机器人导航,具体而言,涉及一种基于预测碰撞时间地图的动态环境路径规划方法。
背景技术:
1、由于机器人运动规划的复杂性,机器人运动规划一直是计算机研究的一个推动领域。因为在动态环境中,具有有限速度的点机器人的运动规划是一个难题。运动规划的基本问题是为机器人获得从起点到目标点的无碰撞路径。
2、传统的d*算法、d*lite算法,均是先进行初始规划,然后根据环境变化增量更新规划,以适应动态环境。其中,更新的规则较为复杂,难以处理复杂的动态环境。
技术实现思路
1、有鉴于此,本申请实施例的目的在于提供一种基于预测碰撞时间地图的动态环境路径规划方法,能够改善机器人难以在复杂高动态环境中进行路径规划的问题。
2、为实现上述技术目的,本申请采用的技术方案如下:
3、本申请实施例提供了一种基于预测碰撞时间地图的动态环境路径规划方法,所述方法包括:
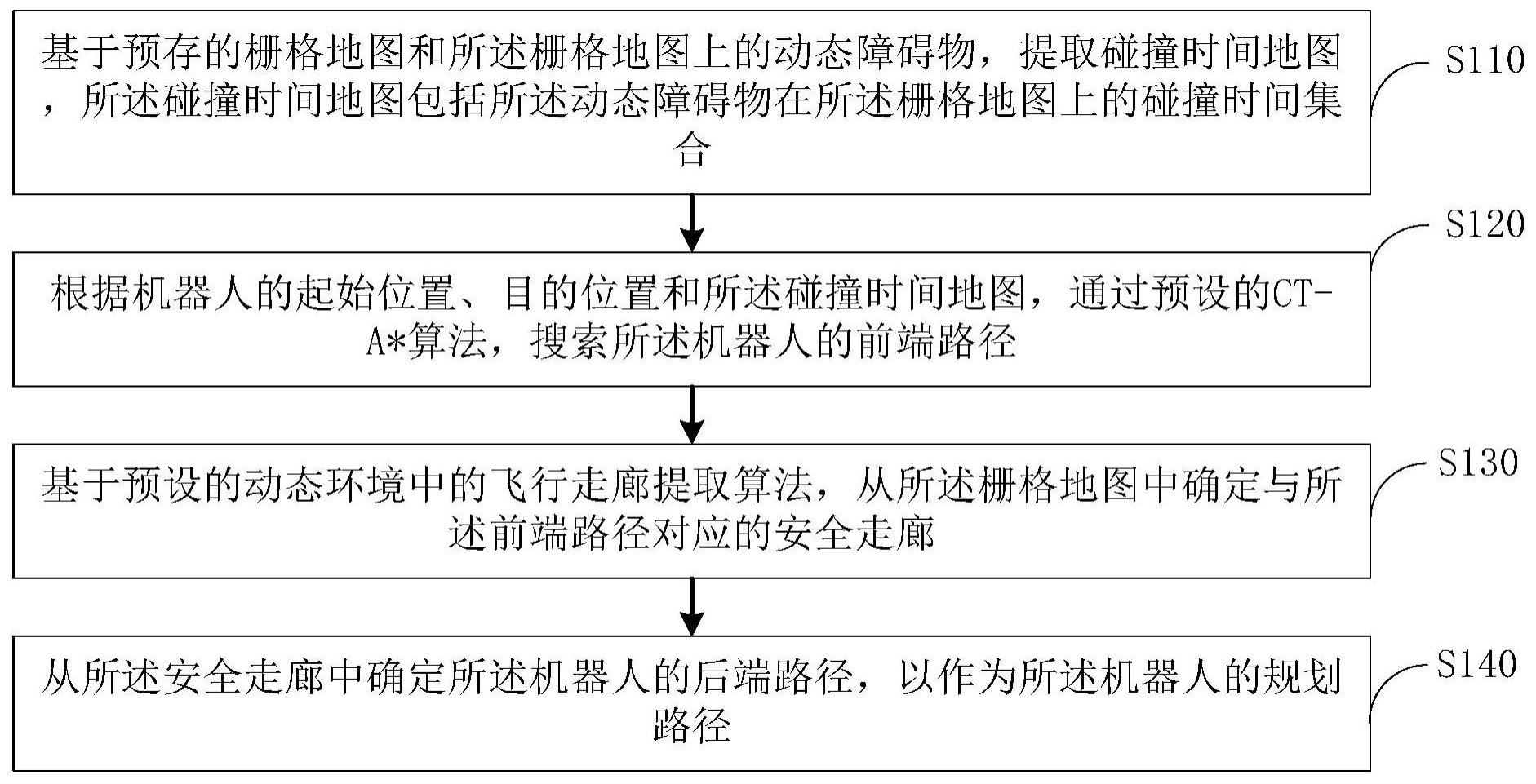
4、s110,基于预存的栅格地图和所述栅格地图上的动态障碍物,提取碰撞时间地图,所述碰撞时间地图包括所述动态障碍物在所述栅格地图上的碰撞时间集合;
5、s120,根据机器人的起始位置、目的位置和所述碰撞时间集合,通过预设的ct-a*算法,搜索所述机器人的前端路径;
6、s130,基于预设的动态环境中的飞行走廊提取算法,从所述栅格地图中确定与所述前端路径对应的安全走廊;
7、s140,从所述安全走廊中确定所述机器人的后端路径,以作为所述机器人的规划路径。
8、在一些可选的实施方式中,步骤s110,包括:
9、定义所述栅格地图上的所述动态障碍物为oi,所述动态障碍物的形状为si,所述动态障碍物的位置为pi,所述动态障碍物的速度为vi,1≤i≤m,m为大于1的整数;
10、所述动态障碍物oi经过所述栅格地图中的一个地图节点nodej,0≤j≤n的碰撞时间为:
11、
12、其中,表示机器人经过栅格图中一个节点的起始时间,ttoj,i表示机器人经过栅格图中一个节点的终止时间;
13、将所述障碍物转换成半径为r的球体,则所述动态障碍物oi对于所述栅格地图中的地图节点nodej的碰撞时间为:
14、
15、其中:
16、
17、
18、θ表示所述动态障碍物速度反方向矢量与地图节点nodej到动态障碍物方向矢量的夹角,d表示动态障碍物栅格图节点路径长度的一半;
19、针对所述栅格地图上的所有动态障碍物,经过所述栅格地图中的一个节点的碰撞时间集合为:
20、在一些可选的实施方式中,在步骤s110与步骤s120之间,所述方法还包括:
21、将所述碰撞时间集合γj进行变换,其中,对应任意两个动态障碍物的碰撞时间集合γj,a,γj,b,进行如下变换:
22、
23、对有重合的两个任意时间段求并集,得到新的碰撞时间域,为:
24、
25、其中,λ为小于m的正整数,中任意两个时间段不相交。
26、在一些可选的实施方式中,步骤s120,包括:
27、s121,在所述栅格地图中,通过所述ct-a*算法从所述起始位置开始搜索,并扩展每个节点的邻居节点,其中,所述起始位置为起始节点;
28、s122,判断所述机器人运动至所述邻居节点的时刻t是否再时间域中,其中,所述时刻t的计算方式为:
29、
30、其中,gscore[neighbor]表示所述机器人从所述邻居节点位置到起始位置的移动消耗,velrobot表示机器人的当前速度;
31、s123,将所述机器人经过所述邻居节点的时间不在所述碰撞时间集合之中的节点作为可行驶节点,即满足:
32、重复步骤s121至步骤s123,直至扩展的邻居节点为所述目的位置,其中,得到的所有可行驶节点形成所述前端路径。
33、在一些可选的实施方式中,步骤s130,包括:
34、s131,针对所述前端路径上的每个节点,确定在三维空间中所述每个节点周围的避障点集合;
35、s132,利用预设的快速区域迭代膨胀算法,确定包含所述每个节点且体积不超出所述避障点集合的凸多面体;
36、s133,将所述每个节点的凸多面体形成的通道,确定为所述机器人的所述安全走廊。
37、在一些可选的实施方式中,步骤s140,包括:
38、从所述安全走廊中,确定所述起始位置至所述目的位置的最短路径,作为所述机器人的所述规划路径。
39、在一些可选的实施方式中,所述方法还包括:
40、s150,控制所述机器人沿所述规划路径行驶。
41、采用上述技术方案的发明,具有如下优点:
42、在本申请提供的技术方案中,基于预存的栅格地图和栅格地图上的动态障碍物,提取碰撞时间地图;然后根据机器人的起始位置、目的位置和碰撞时间地图,通过预设的ct-a*算法,搜索机器人的前端路径;再基于预设的动态环境中的飞行走廊提取算法,从栅格地图中确定与前端路径对应的安全走廊;从安全走廊中确定机器人的后端路径,以作为优化后的规划路径。在本方案中,对于栅格地图,在每个时间节点上增加碰撞时间集合属性以表示环境中的动态障碍物,如此,可以减少后续规划算法的时间复杂度。另外,利用ct-a*算法搜索前端路径,可以实现在动态环境中实时规划路径。再基于动态环境中的飞行走廊提取算法,可以在安全走廊的几何约束下,优化机器人的规划路径,如此,能够改善机器人难以在复杂高动态环境中进行路径规划的问题。
技术特征:
1.一种基于预测碰撞时间地图的动态环境路径规划方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,步骤s110,包括:
3.根据权利要求2所述的方法,其特征在于,在步骤s110与步骤s120之间,所述方法还包括:
4.根据权利要求3所述的方法,其特征在于,步骤s120,包括:
5.根据权利要求1所述的方法,其特征在于,步骤s130,包括:
6.根据权利要求1所述的方法,其特征在于,步骤s140,包括:
7.根据权利要求1所述的方法,其特征在于,所述方法还包括:
技术总结
本申请提供一种基于预测碰撞时间地图的动态环境路径规划方法。方法包括:基于预存的栅格地图和栅格地图上的动态障碍物,提取碰撞时间地图,碰撞时间地图包括动态障碍物在栅格地图上的碰撞时间集合;根据机器人的起始位置、目的位置和碰撞时间地图,通过预设的CT‑A*算法,搜索机器人的前端路径;基于预设的动态环境中的飞行走廊提取算法,从栅格地图中确定与前端路径对应的安全走廊;从安全走廊中确定机器人的后端路径,以作为机器人的规划路径。如此,可以减少路径规划的时间复杂度,能够改善机器人难以在复杂的动态环境中进行路径规划的问题。
技术研发人员:江涛,熊祖明,黄江帅,苏晓杰
受保护的技术使用者:重庆大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!