一种基于激光传感器的作物高度测量装置及方法
本发明涉及农作物监测,具体涉及一种基于激光传感器的作物高度测量装置及方法。
背景技术:
1、株高是农作物重要的农艺性状,被广泛用于分析和估计作物田间生长整体状况以及产量预估中。在农业生产中,高效、准确地估算株高和生物量是监测作物生长状况和加强特定农艺措施(施肥、除草、收获等)决策支持系统的先决条件。采用大规模的人工测量耗时费力、且精度较低。
2、近年来,随着遥感技术以及各类高精度传感器的发展,图像处理技术和计算机能力的提高,株高的获取途径也呈现出多样化的特点。遥感测高依据平台的不同主要分为3类,分别为卫星遥感测高、低空无人机遥感测高和近地遥感测高。卫星遥感器在树木高度的估算上达到了较好的效果,但是由于飞行高度较高,对于小麦玉米等低矮作物株高的估算精度并不理想。低空和近地遥感则可以进行高精度的株高估算,用多旋翼无人机搭载高清rgb相机和多光谱成像设备对玉米群体的株高进行了估算,但是难以反映玉米群体的较小株高差异。近地遥感数据采集容易受到田间环境的影响。激光雷达是一种主动遥感技术,利用无人机搭载激光雷达传感器已经应用于不同类型作物的株高监测相比于数码相机的株高估测,激光雷达的准确性更高。
3、但是不容忽视的是先进的设备需要有先进的技术、技能相匹配,不论是无人机搭载rgb传感器、多光谱传感器、高光谱传感器抑或是激光雷达传感器,要想获取株高数据必须有专业的技术进行图像获取、图像处理等操作,显然这对非遥感、机械等专业的农技人员、小农户来说并不切合实际。
4、因此亟需一种结构简单便于操作的作物测高设备。
技术实现思路
1、本发明为解决现有作物测高设备专业化程度高、操作复杂的问题,提供了一种基于激光传感器的作物高度测量装置,设置主底盘将多个激光发射器和激光接收器分设于作物两侧,通过激光接收器的作业状态感应作物,并通过滑动模组改变激光传感器位置,并将电机的旋转量转换为激光传感器的位移量,从而得出作物的生长高度。
2、为了实现上述目的,本发明第一方面提出一种基于激光传感器的作物高度测量装置,包括激光传感器,所述激光传感器数量为多个,激光传感器包括激光发射器和激光接收器,还包括主底盘,所述主底盘上对向设置有第一滑动模组和第二滑动模组,所述第一滑动模组和第二滑动模组均包括滑块、电机和滑轨;
3、第一滑动模组的所述滑块连接有第一底盘,所述第一底盘上纵向等距固定多个激光发射器,第二滑动模组的所述滑块连接有第二底盘,所述第二底盘上纵向等距固定多个激光接收器,所述激光发射器与激光接收器设置于同一高度且一一对应;
4、所述激光发射器和激光接收器连接有主控模块,所述主控模块还与第一滑动模组和第二滑动模组的所述电机电性连接,电机设置有编码器,所述编码器与主控模块电性连接;
5、底盘的底部设置有移动机构。
6、作业原理,初始状态下,作物高度低于激光传感器设置高度,此时激光接收器可以接收到激光发射器发出的光束,激光接收器输出高电平信号。随着植物的生长,激光发射器发出的光束在投射过程中被植物阻挡无法被激光接收器接收,激光接收器输出低电平信号。当全部激光接收器输出均为低电平时,主控模块使电机转动带动滑块向上移动,使多个激光接收器均输出高电平信号。在这个过程中编码器记录电机的旋转角度,旋转圈数和滑块的位移量相关,作物的生长长度与滑块的位移量相同,从而可以推算出作物的生长长度。
7、进一步地,所述主控模块包括mcu芯片、驱动模块、led显示屏,所述mcu芯片的输入端连接所述激光接收器的输出端,mcu芯片的输出端连接驱动模块,mcu芯片通过uart串口连接有led显示屏,mcu芯片的adc引脚连接编码器;
8、所述激光发射器通过驱动模块连接电源,所述驱动模块的输出端连接电机。
9、led显示屏设置于主底盘上端。驱动模块包括多个驱动芯片。
10、进一步地,mcu芯片还设置有无线通信模块、所述无线通讯模块包括蓝牙模块、红外模块和wifi模块中的一种或多种组合,mcu芯片通过无线通信模块连接有上位机。
11、设置上位机便于传输控制指令。
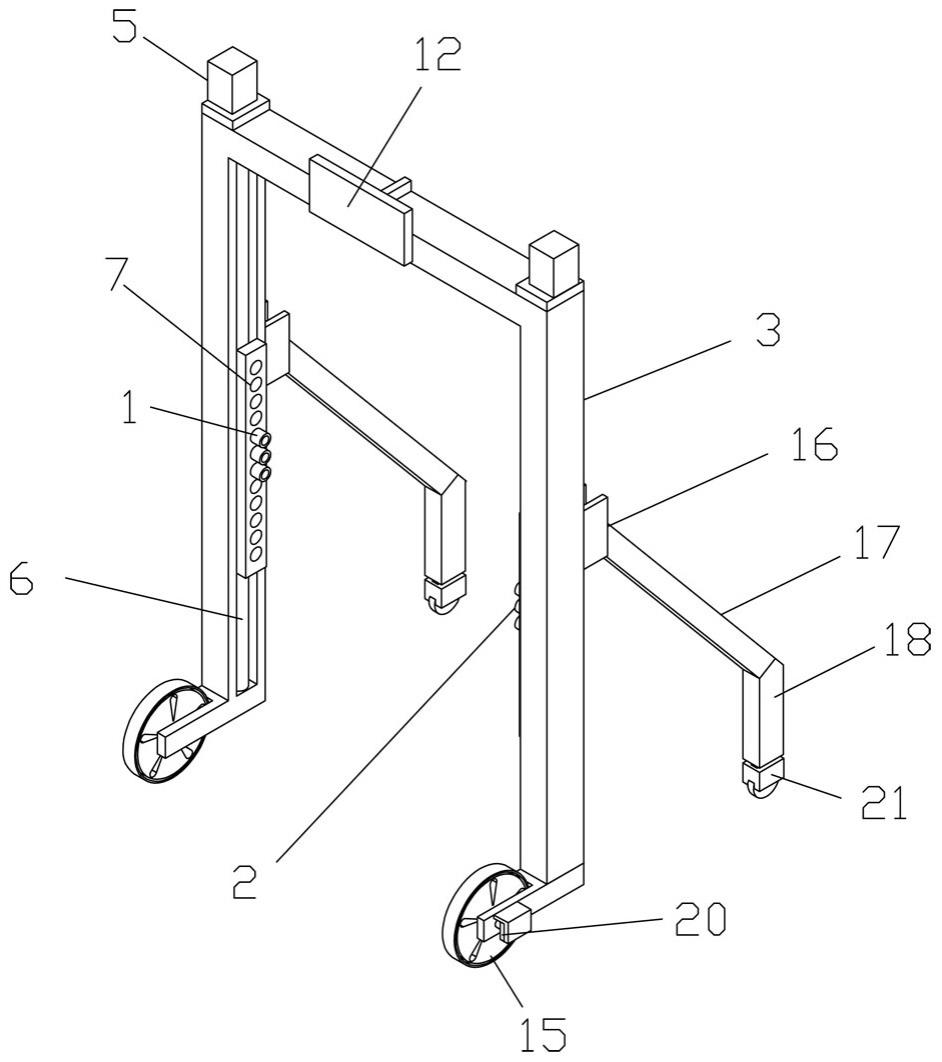
12、进一步的,所述主底盘包括连接段和两个支撑段,所述连接段为一字型结构,两个所述支撑段分设于横向段两侧,且与支撑段为一体化结构,两个支撑段相互平行,支撑段为l字型板体,支撑段的竖直段开设有一字型的通槽,所述通槽内设置第一滑动模组或第二滑动模组。
13、主底盘整体呈门字形,设置通槽便于滑块在滑轨上滑动。
14、进一步地,所述支撑段的横向段呈凹字型结构,所述移动机构包括第一轮组,所述第一轮组包括两个驱动轮,所述驱动轮设置于支撑段的横向段凹槽位置,且与支撑段的横向端转动连接,驱动轮的转轴连接有驱动电机,所述驱动电机电性连接所述驱动模块。
15、驱动电机用于带动主底盘移动,mcu芯片使用pwm控制方式通过驱动模块实现驱动电机的控制。
16、进一步地,所述支撑段与通槽相邻的侧面设置有支撑机构,所述支撑机构包括连接板和连接杆,所述连接板为凹字型板,所述连接杆为长条状板体,连接杆的一端设置于连接板的凹槽内,且与连接板固定,连接杆与所述支撑段之间的夹角为锐角。
17、支撑机构用于对主底盘进行支撑,连接杆与支撑和地面组合后呈直角三角形结构,稳定性较好,能够使主底盘直立在农田中。
18、进一步地,所述连接杆的底端设置有转接板,所述转接板为内部中空的梯形板,转接板的上端与连接杆固定,转接板的底面与所述支撑段的底面平行,转接板内设置有转动电机;
19、所述移动机构还包括第二轮组,所述第二轮组包括两个万向轮,所述万向轮的转轴与所述转动电机的输出轴固定,转动电机电性连接驱动模块。
20、所述转接板具有换向作用,设置转接板首先便于转动电机的设置,另外便于和万向轮进行安装,万向轮和驱动轮的底面位于同一高度。
21、mcu芯片使用pwm控制方式通过驱动模块实现转动电机的转动控制。通过转动电机和万向轮实现主底盘的转向调节。
22、进一步地,所述第一底盘和第二底盘均为方形板体,第一底盘和第二底盘均纵向等距开设有多个圆形安装孔。
23、第一底盘和第二底盘结构简单,且满足了激光发射器和激光接收器安装需要。
24、本发明的第二方面提出一种基于激光传感器的作物高度测量装置的测量方法,包括:
25、步骤1:通过上位机控制主控模块,通过移动机构将主底盘移动至检测点;
26、步骤2:将作物设置于支撑段之间,激光接收器接收激光发射器发射的激光,并输出信号至mcu芯片;
27、步骤3:植物生长渐阻挡多个激光接收器接收激光发射器发射的激光,mcu芯片的输输入端电平改变,主控模块控制第一滑动模组和第二滑动模组同步升高使作物再次低于激光传感器设置位置;
28、步骤4:编码器检测电机转动角度,并将检测值发送至mcu芯片;
29、步骤5:将转动角度转换为位移量,得到作物生长高度。
30、通过上述技术方案,本发明的有益效果为:
31、(1)本发明实现了农作物高度的自动测量,设置主底盘在主底盘左右两侧设置有第一滑动模组和第二滑动模组,通过第一滑动模组带动第一底盘,通过第二滑动模组带动第二底盘,第一底盘和第二底盘上下移动,从而使固定在第一底盘上的激光发射器和固定在第二底盘上的激光接收器同步上下移动,主底盘设置在作物两侧。随着作物生长,作物会渐遮挡多个激光发射器,当激光发射器被遮挡,激光接收器将无法接收到激光发射器的光束,主控模块的信号改变,主控模块控制第一滑动模组和第二滑动模组带动第一底盘和第二底盘向上移动,直至所有的激光发射器都能接收到光束,激光传感器的位移量就是农作物的高度。以此实现农作物生长高度的自动检测。
32、(2)本发明结构简单便于操作,本发明实现了自动检测,只需要将主底盘放在田间,使作物位于主底盘中部。可以开始监测。实现长期监测,工作人员无需进行数据采集,极大程度提高了检测作业的便捷性。第一滑动模组和第二滑动模组均为通用件,便于维护和控制。
- 还没有人留言评论。精彩留言会获得点赞!