一种定日镜表面清洁度的测量系统及方法与流程
本发明属于太阳能热发电,尤其涉及一种定日镜表面清洁度的测量系统及方法。
背景技术:
1、在经济不断发展的同时,能源日趋短缺,传统的不可再生能源日益枯竭,经济发展越来越受制于能源的开发利用,可再生能源的利用受到普遍关注,特别是太阳能利用更受世人的重视。
2、太阳能热发电是当前太阳能利用的一种主要方式。当前太阳能热发电按照太阳能采集方式可划分为:(1)塔式太阳能热发电;(2)槽式太阳能热发电;(3)碟式太阳能热发电。
3、在太阳能热发电领域,塔式太阳能热发电因具有高光热转换效率,高聚焦温度,控制系统安装调试简单,散热损失少等优势,将成为下一个可商业化运营的新型能源技术。
4、在塔式太阳能热发电领域,定日镜为塔式太阳能热发电系统的一个重要组成部分。如图1所示,定日镜将太阳光反射到吸热塔塔顶的吸热器上,对吸热工质进行加热,从而将光能转化为热能,进而驱动汽轮机发电。
5、塔式光热电站的定日镜场运行过程中,定日镜表面的清洁度会越来越低,直接影响整个镜场能够收集的能量,进而影响塔式太阳能光热发电系统的整体性能,因此,及时了解整个镜场的清洁度水平尤为重要。当定日镜镜面清洁度低于一定值时,将对定日镜进行清洗,以此来保证定日镜镜场所能提供的能量满足额定发电要求。
6、现有技术中采用的定日镜表面清洁度测量方法,适合抽样测量定日镜表面清洁度,当需要大规模测量时,测量效率也会下降。
技术实现思路
1、为解决上述问题,本发明的目的是提供一种定日镜表面清洁度的测量系统及方法,以解决在现有技术中大规模、高效率测量定日镜表面清洁度的技术问题。
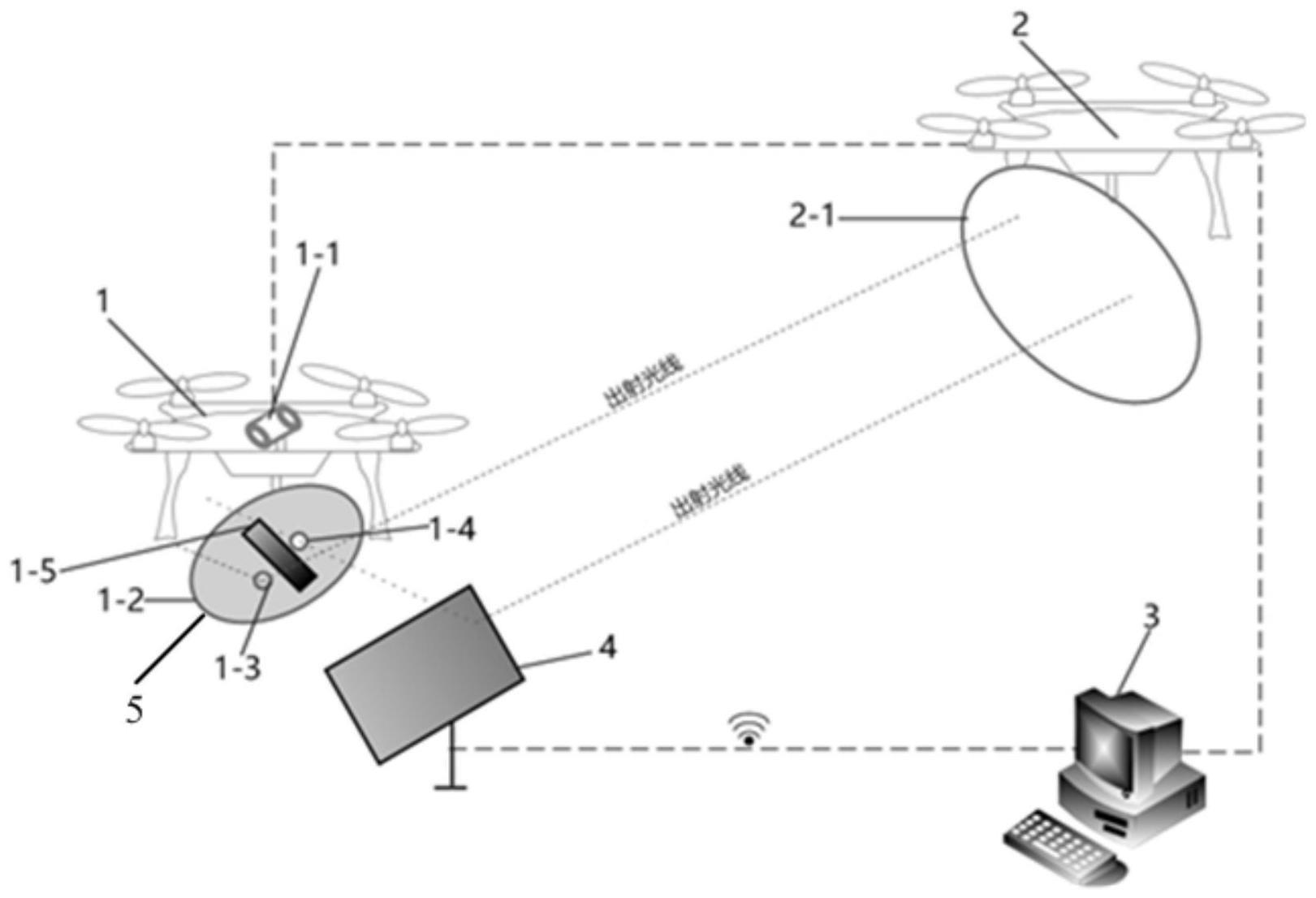
2、为实现上述目的,本发明的技术方案为:一种定日镜表面清洁度的测量系统,包括:
3、至少两个无人机,一无人机载有图像采集装置和光线控制载体;另一无人机载有接收面,用于接收待测定日镜表面反射的光斑和所述光线控制载体上的标准镜投射的光斑;
4、所述光线控制载体包括相互间隔设置的透光区和所述标准镜,其中,所述透光区允许入射光线穿过所述光线控制载体到达所述待测定日镜表面,并且,所述光线控制载体能够在第一状态和第二状态之间切换,所述光线控制载体在所述第一状态时能够阻止所述待测定日镜和所述标准镜向所述接收面投射光斑,所述光线控制载体在所述第二状态能够允许所述待测定日镜和所述标准镜向所述接收面投射光斑;
5、图像采集装置,用于采集所述标准镜和待测定日镜投射至所述接收面的光斑图像和所述接收面的背景图像,所述光斑图像包括所述标准镜和所述待测定日镜投射的光斑;
6、计算机控制处理端,用于根据预设的采样路径控制两个所述无人机分别飞行至各自的预设位置、控制所述待测定日镜转动至目标角度、控制所述光线控制载体与所述待测定日镜的相对位置关系、控制所述光线控制载体在所述第一状态和第二状态之间切换、以及用于根据获取到的所述光斑图像和所述背景图像计算所述待测定日镜的表面清洁度。
7、作为优选地,所述光线控制载体还包括底板和遮挡部;
8、所述透光区为设置在所述底板上的通孔或缺口;
9、所述标准镜设置在所述底板的能够接收所述入射光线的一侧;
10、所述遮挡部能够在第一位置和第二位置之间切换,当所述遮挡部位于所述第一位置时,所述遮挡部能够对所述透光区和所述标准镜进行遮挡,使所述光线控制载体处于所述第一状态,当所述遮挡部位于所述第二位置时,所述遮挡部能够解除对所述透光区和所述标准镜的遮挡,使所述光线控制载体处于所述第二状态。
11、作为优选地,所述透光区的大小与所述标准镜的大小相同。
12、作为优选地,所述无人机上设有悬停系统,控制无人机在预设悬停位置保持不变,从而保证待测定日镜的入射光线在一定时间范围内持续不变。
13、作为优选地,所述无人机上设有机载云台,通过所述机载云台调整所述图像采集装置的朝向;和/或,所述无人机上设有定位装置,用于提供并定位所述无人机的位置信息。
14、本发明还提供了一种定日镜表面清洁度的测量方法,采用所述的定日镜表面清洁度的测量系统,包括以下步骤:
15、获取用于接收待测定日镜反射光斑的接收面的背景图像;
16、获取所述待测定日镜表面与标准镜表面反射至所述接收面的至少一个光斑图像;
17、分别将所述待测定日镜、所述标准镜对应的所述光斑图像上的灰度值与所述背景图像的灰度值进行差值对比,计算输出所述待测定日镜表面清洁度结果。
18、作为优选地,所述获取用于接收待测定日镜反射光斑的接收面的背景图像之前包括:
19、启动定日镜表面清洁度测量系统,使定日镜镜场处于测量状态,并开启两个所述无人机、图像采集装置和计算机控制处理端;
20、通过计算机控制处理端输入待测定日镜列表;
21、根据所述待测定日镜列表自动规划两个所述无人机的路径,根据规划后的采样路径控制两个所述无人机分别飞行至各自的预设位置;
22、当携带所述图像采集装置的无人机到达预设位置后,控制所述待测定日镜转动至目标角度;
23、调整所述待测定日镜与所述光线控制载体与的相对位置关系,控制另一无人机上携带的所述接收面与所述待测定日镜镜面平行,控制所述光线控制载体在所述第一状态和第二状态之间切换从而获取图像;
24、在当前所述待测定日镜测量完成后自动飞行至下一待测定日镜的预设位置继续后续操作。
25、作为优选地,获取所述光斑图像时,通过计算机控制处理端控制光线控制载体处于所述第二状态,从而获取所述定日镜和所述标准镜向所述接收面投射的光斑图像;
26、获取所述背景图像时,通过计算机控制处理端控制所述光线控制载体处于所述第一状态,从而获取无光斑投射到所述接收面时的接收面背景图像。
27、作为优选地,在获取一个以上所述光斑图像时,所述光线控制载体始终与所述待测定日镜镜面平行设置,同时通过控制所述光线控制载体绕中心转轴沿所述光线控制载体自身所在的平面按照预设的一个或多个转动角度进行自转,每转动至一个角度,通过图像采集装置获取对应角度下的所述光斑图像。
28、作为优选地,所述计算输出所述待测定日镜表面清洁度结果通过如下的公式获得:
29、
30、其中,i为获取的第i张光斑图像,n为获取的光斑图像的数量;
31、j为获取的第i张光斑图像上的第j个像素点,m为每张光斑图像中的像素点的数量;
32、为待测定日镜对应的第i张光斑图像上第j个像素点处的灰度值;
33、为标准镜对应的第i张光斑图像上第j个像素点处的灰度值;
34、为背景图像上第j个像素点处的灰度值。
35、采用上述技术方案后,与现有技术相比,本发明的有益之处在于:
36、1、本发明基于无人机的定日镜表面清洁度测量系统和方法,该发明可大规模快速、方便的对镜场中定日镜表面的清洁度水平进行测量。
37、2、本发明通过光线控制载体控制到达待测定日镜表面的入射光线,通过计算机控制处理端控制光线控制载体是否遮挡标准镜和透光区以控制到达待测定日镜表面的光线,采集到光斑图像和背景图像作为输入样本,有利于提高清洁度的测量准确性。
38、3、在本发明采用计算机控制处理端通过网络与两个无人机、图像采集装置和定日镜连接,能够根据预设的采样路径控制两个所述无人机分别飞行至各自的预设位置、控制所述待测定日镜转动至目标角度、控制所述光线控制载体与所述待测定日镜的相对位置关系、控制所述光线控制载体在所述第一状态和第二状态之间切换、以及根据获取到的所述光斑图像和所述背景图像计算所述待测定日镜的表面清洁度;在当前所述待测定日镜测量完成后自动飞行至下一待测定日镜自动完成测量工作,有利于采集到光斑图像和背景图像样本,提高工作效率,实现系统自动化;
39、4、在本发明无人机上设有悬停系统,具有悬停功能,保证定日镜的入射光线在一定时间范围内持续不变,增加入射光线的稳定性,有利于保证图像样本的精度。
- 还没有人留言评论。精彩留言会获得点赞!