具有合成孔径的雷达传感器的制作方法
本发明涉及一种用于机动车的雷达传感器,该雷达传感器具有用于接收雷达回波的天线阵列并且具有在至少一个维度中进行角度分辨的分析处理系统,该分析处理系统用于确定所定位的对象的间距和定位角度并且用于根据合成孔径原理来创建至少二维的雷达图像,其中,该分析处理系统具有用于补偿接收到的信号中的相位误差的补偿级。
背景技术:
1、用于测量对象(例如车辆和障碍物)的间距、相对速度和方位角和/或仰角的雷达系统越来越多地用于机动车中的安全和舒适功能。几年来已研究了具有合成孔径的雷达(sar)在汽车领域中的应用。合成孔径的原理在雷达传感器的自运动时允许特别精确的角度测量,其方式是,将不同局部位置处的测量解释为合成天线孔径(天线面)。合成孔径通过以下方式形成:发送和接收天线在连续的测量时间点上由于雷达的自运动而位于不同的局部位置处并且因而可以算术移位,就好像大天线孔径沿着行进轨迹存在一样。因此,利用各个发送和接收天线可实现角度测量中的、利用真实天线孔径无法达到的分辨率。这尤其是因为通过雷达的自运动能实现大的合成孔径,该大的合成孔径由于需要大量的天线元件是不切实际或不可能的。
2、为了将测得的雷达信号分析处理为合成孔径,将雷达环境通常假定为静止的。此外,雷达传感器的自运动、即在其上进行单个测量的位置应是已知的。雷达的自轨迹可以例如根据车辆的行驶动力学数据来估计,并且用作用于sar分析处理算法的输入,并且代表计算sar图像的基础。
3、在这种自运动估计中的误差会导致相位误差,所述相位误差在成像过程中会导致模糊的sar图像或目标的位置误差。尤其是(例如由于不平坦的路面引起的)振动或随机出现的位置变化没有被考虑到常规的运动模型中。
4、本发明能利用不同的调制方法来实现。
5、在当今的机动车雷达系统中通常使用具有快速斜坡的fmcw调制(快速线性调频调制,fast-chirp-modulation),其中,具有相同坡度的多个陡峭的线性频率斜坡被依次通过。典型的发送频率为24ghz或77ghz。最大可占用的带宽低于4ghz,但典型地低得多(例如为0.5ghz)。瞬时发送信号与接收信号的混频产生低频信号(称为拍频),该低频信号的频率与间距成正比。系统通常设计成使得拍频的由多普勒频率引起的份额可以忽略不计。所获得的间距信息在很大程度上是唯一明确的,多普勒频移可以随后通过观察复间距信号的相位越过斜坡的时间发展来进行确定。间距确定和速度确定彼此独立地进行,通常借助二维傅里叶变换。
6、在sar分析处理中能够使用快速线性调频调制的相同的测量原理。间距分析处理在很大程度上是相同的。越过斜坡的多普勒分析处理现在被sar分析处理替代或补充。因此,这不提供多普勒测量,而是在假定目标静止且认识到自运动的情况下提供角度测量。
7、对于sar分析处理,在文献中已知大量算法。尤其是反投影算法或其变体之一特别适用于具有合成孔径的雷达(m.farhadi、r.feger、j.fink、m.gonser、j.hasch和a.stelzer所著的《adaption of fast factorized back-projection to automotive sarapplications》,载于《european radar conference》,2019年10月)。这种算法能够处理任何合成孔径(自我轨迹)。然而,这种灵活性会导致计算复杂性,因为为此无法使用快速傅里叶变换。
8、为了进行相位误差补偿,在文献中此外还已知相位梯度算法(pga)(d.wahl、p.eichel、d.ghiglia和c.jakowatz所著的《phase gradient autofocus-arobust toolfor high resolution sar phase correction》,载于《ieee航空航天与电子系统汇刊》,第30卷,第3期,1994年7月)和广义相位梯度算法(gpga)(a.evers和j.a.jackson所著的《ageneralized phase gradient autofocus algorithm》,载于《ieee计算成像汇刊》,第5卷,第4期,2019年12月)。这些非参数算法估计相位误差,而无需明确的误差模型。场景的最强目标的雷达数据在此用于确定sar图像的相位误差。为此,首先对数据进行匹配地布置和过滤。接着,基于成本函数来估计相位误差的梯度。成本函数也被称为pga的内核。因此,借助迭代方法来改进sar图像的图像质量。与pga相比,gpga与不同的成像算法、例如反投影算法兼容。
技术实现思路
1、本发明的任务是,以尽可能小的计算开销产生在质量上高品质的雷达图像。
2、根据本发明,该任务通过以下方式来解决:分析处理系统配置为用于通过数字波束形成将定位区域划分为多个彼此角度偏移的扇区、创建用于不同扇区的单独的雷达图像并且将所述雷达图像在逐扇区地补偿相位误差之后组合成一个整体图像。
3、为了进行角度估计,在现有技术中已经通常将组天线(天线阵列)用作接收天线。利用这样的天线阵列,通过数字波束形成(英:digital beam forming,dbf)的已知技术可以测量平面波的入射角度,如该平面波由远场中的目标所产生的那样。此外,可以产生角度单元(winkelzellen),从而产生了以角度将具有相同的距离和径向速度的目标分离的可能性。每个波束在此代表一种空间滤波器。以这种方式,将雷达图像划分为扇区,所述扇区分别仅覆盖窄的角度范围。然后,具有根据已知算法来补偿相位误差的角度分析处理分别仅在所涉及的扇区内进行。因此,本发明考虑到这种情况:典型出现的相位误差通常具有与分别定位的对象的定位角度的高度相关性。通过限制到相对窄的角度范围,可以在很大程度上抑制这种角度相关性的影响。以此开辟了在角度分析处理范畴内通过降低在对彼此相继的“线性调频(chirps)”进行采样时的采样率来降低计算开销的空间。尽管采样率的降低通常会导致旁波瓣的形成,但这些旁波瓣绝大部分位于分别观察的扇区之外,使得在该扇区内获得低噪声雷达图像。如果将以这种方式为各个扇区生成的雷达图像组合成一个整体图像,则尽管节省了计算开销,但总体上获得了高质量的雷达图像。
技术特征:
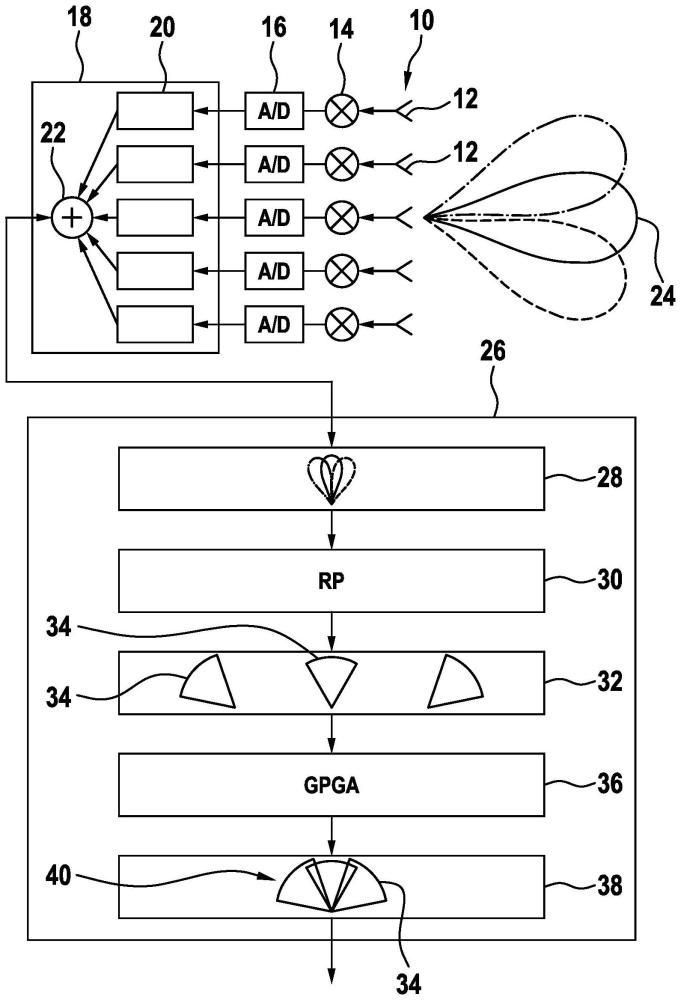
1.一种用于机动车的雷达传感器,所述雷达传感器具有用于接收雷达回波的天线阵列(10)并且具有在至少一个维度中进行角度分辨的分析处理系统(26),所述分析处理系统用于确定所定位的对象的间距和定位角度并且用于根据合成孔径原理来创建至少二维的雷达图像(40),其中,所述分析处理系统具有用于补偿接收到的信号中的相位误差的补偿级(36),其特征在于,所述分析处理系统(26)配置为用于通过数字波束形成将定位区域划分为多个彼此角度偏移的扇区(54)、创建用于不同扇区的单独的雷达图像(34)并且将所述雷达图像(34)在逐扇区地补偿所述相位误差之后组合成一个整体图像(40)。
2.根据权利要求1所述的雷达传感器,其中,在所述分析处理系统(26)中实施用于创建逐扇区的雷达图像(34)的反投影算法。
3.根据权利要求2所述的雷达传感器,其中,在所述补偿级(36)中实施gpga算法(广义相位梯度算法,generalized phase gradient algorithm)。
技术总结
一种用于机动车的雷达传感器,所述雷达传感器具有用于接收雷达回波的天线阵列(10)并且具有在至少一个维度中进行角度分辨的分析处理系统(26),所述分析处理系统用于确定所定位的对象的间距和定位角度并且用于根据合成孔径原理来创建至少二维的雷达图像(40),其中,所述分析处理系统具有用于补偿接收到的信号中的相位误差的补偿级(36),其特征在于,所述分析处理系统(26)配置为用于通过数字波束形成将定位区域划分为多个彼此角度偏移的扇区(54)、创建用于不同扇区的单独的雷达图像(34)并且将所述雷达图像(34)在逐扇区地补偿所述相位误差之后组合成一个整体图像(40)。
技术研发人员:F·马苏德,J·芬克,R·费格尔,J·哈施
受保护的技术使用者:罗伯特·博世有限公司
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!