一种基于全变差约束的扫描雷达递归快速超分辨成像方法
本发明属于雷达成像,具体涉及一种基于全变差约束的扫描雷达递归快速超分辨成像方法。
背景技术:
1、机载扫描雷达前视区域的成像被广泛运用于对海成像、飞行器自主着陆、物资空投等领域。由于常规的单站sar和dbs技术无法实现前视成像,实波束扫描雷达波束锐化技术成为实现前视成像的一种重要技术手段。
2、实孔径雷达的方位分辨率受天线孔径的约束,理论上可以通过增大天线的物理孔径提高方位分辨率,但由于雷达平台空间限制,布设大孔径天线往往难以实现,导致实孔径雷达方位分辨率低,难以满足高分辨率成像需求。
3、正则化方法是实现实孔径雷达超分辨成像的一种有效途径。文献“y.zhao,j.g.liu,b.zhang,w.hong,and y.-r.wu,"adaptive total variation regularizationbased sar image despeckling and despeckling evaluation index,"ieeetransactions on geoscience and remote sensing,2014,pp.2765–2774.”提出了一种基于tv范数的边缘增强方法,对于扩展目标的重建性能显著提升。然而现有方法计算复杂度较高,并且只能采用批处理方式处理,导致实时性不足,不利于扫描雷达的快速成像。文献“x.yin,l.liu,y.huang,m.feng,y.zhang and j.yang,"fast majorize-minimizationbased super-resolution algorithm for radar forward-looking imaging,"igarss2022-2022ieee international geoscience and remote sensing symposium,kuala lumpur,malaysia,2022,pp.2055-2058”提出了一种基于最大最小化准则的在线超分辨方法,利用共轭梯度算法降解求逆过程,实现了递归更新。然而,由于最大最小化准则中的权重矩阵在更新过程中始终在发生变化,在递归处理回波的过程中每一次都需要额外更新权重矩阵,增加了计算复杂度,使得每一次递归更新的时间增加。对于由非广义正则化项导出的优化问题,选择最大最小化准则求解需要进行多次迭代才能达到收敛,并且每次迭代中仍需实时更新权重矩阵。
技术实现思路
1、为解决上述技术问题,本发明提出了一种基于全变差约束的扫描雷达递归快速超分辨成像方法,在不损失成像性能的同时显著降低计算复杂度。
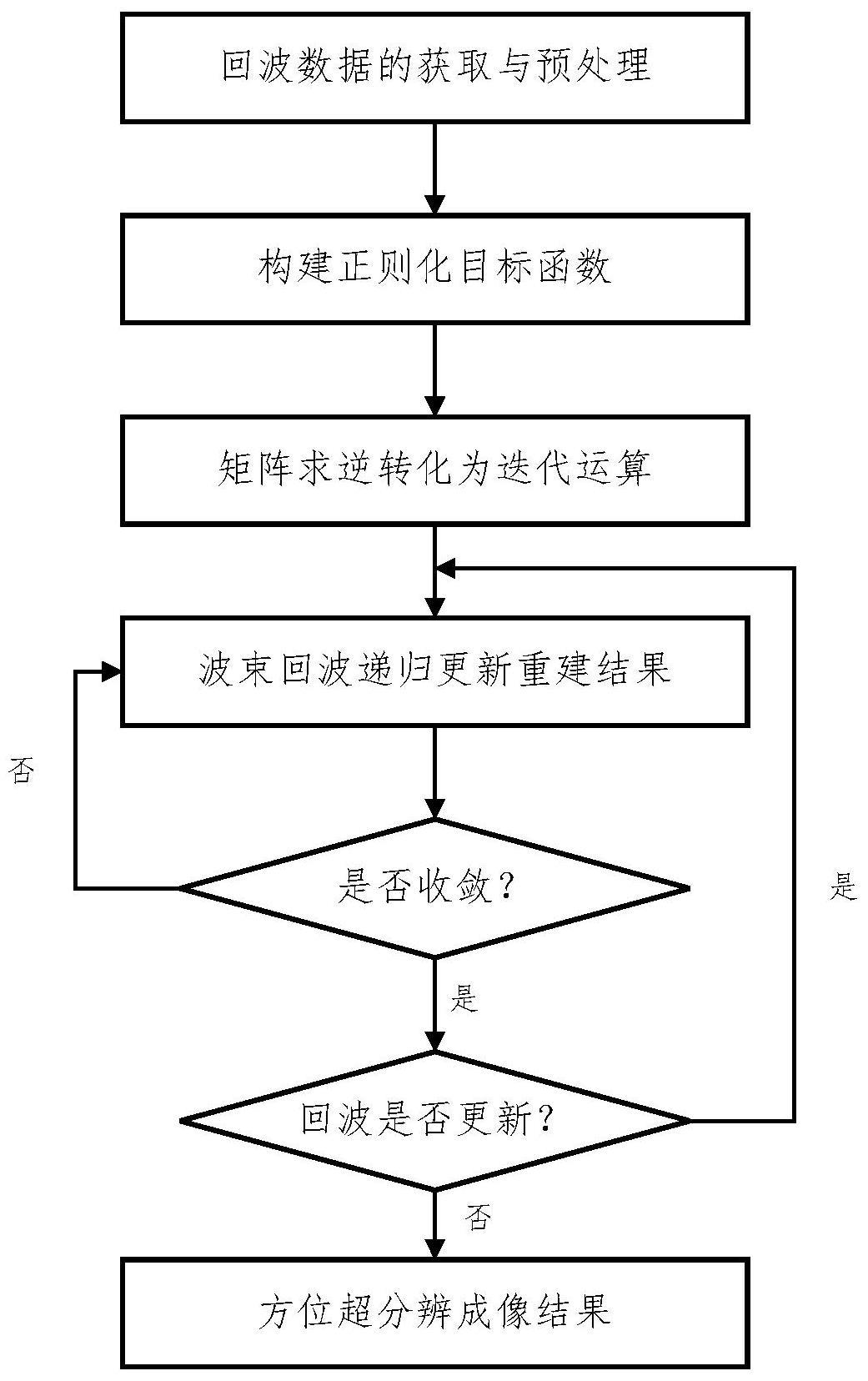
2、本发明采用的技术方案为:一种基于全变差约束的扫描雷达递归快速超分辨成像方法,具体步骤如下:
3、步骤一、机载扫描雷达方位回波建模;
4、基于机载扫描雷达的运动几何模型,扫描雷达发射线性调频信号,经过下变频处理,接收到的回波信号为:
5、
6、其中,σ(x,y)表示场景ω中点目标的散射系数,(x,y)表示场景中某一点的坐标,w(t)表示天线方向图函数调制,rect(·)表示矩形窗函数,τ表示距离向时间采样向量,t表示方位向时间采样向量,tp表示发射信号的脉冲时宽,λ表示载频波长,c表示电磁波传播速度,k表示线性调频率,n(τ,t)表示加性高斯白噪声,r(t)表示目标的距离历史,且r0表示目标起始距离,v表示机载平台运动速度,θ0表示目标空间方位角。
7、经过脉冲压缩和距离走动校正后,方位向回波视为目标散射系数与天线方向图构成的测量矩阵的类卷积,具体如下:
8、y=hx+n (2)
9、其中,y表示回接收到的方位向回波向量,h表示由天线方向图构成的卷积测量矩阵,x表示目标散射系数,n表示噪声向量。
10、步骤二、构建正则化目标函数;
11、在正则化框架下,选择全变差范数构建目标函数,其表达式为:
12、
13、其中,表示恢复的目标散射系数分布,表示数据表征项,表示向量二范数的平方:η表示正则化参数;||dx||1表示全变差范数,d表示梯度矩阵。
14、选择交替方向乘子法(admm)对目标函数进行求解,引入新变量z将式(3)中的目标函数重写为如下形式:
15、
16、s.t.dx=z
17、对于式(4),它的增广拉格朗日形式可写为:
18、
19、其中,(·)t表示转置操作;p表示增广拉格朗日参数;x表示目标散射系数,u表示对偶变量。
20、将式(5)表示的优化问题分解为三个子问题,通过交替更新变量xi+1、zi+1和ui+1来求解,具体更新过程如下:
21、
22、其中,表示门限,表示收缩算子,i表示变量的迭代次数。
23、步骤三、矩阵求逆转化为递归快速迭代运算;
24、对方位向回波y和天线测量矩阵h进行分块处理,则yn=[y0,y1,…,yn]t∈cn×1,hn=[h1,h2,…,hn]t∈cn×n。
25、其中,yn表示n时刻方位向接收到的总的回波信号,yn表示n时刻总回波信号yn的第n个元素,即方位上接收到的第n个回波值;c表示复数域,cn×1表示复数域上维度为n×1大小的矩阵,hn表示将天线测量矩阵h进行行分块处理得到的矩阵,hn∈c1×n表示h的第n行行向量,n表示天线测量矩阵h的列数。
26、则式(6)中关于x的更新公式可转换为如下形式:
27、
28、令可以得到pn+1和pn的关系如下:
29、
30、利用矩阵反演恒等式可得:
31、
32、将上式带入到式(7)可得:
33、
34、观察式(10)可以发现,矩阵反演被转换成迭代处理。
35、步骤四、波束回波递归更新重建结果;
36、基于上述推导,在每次回波到来导致回波矩阵更新时,利用下述公式进行递归更新:
37、
38、其中,选取作为初始值,关于变量z和u的初始值如下:
39、
40、经过i次迭代后,直至相邻两次的超分辨结果的误差不大于设定的误差值χ,循环结束。循环终止条件为:
41、
42、每次回波数据更新,重复步骤四,输出实时超分辨处理结果,直至所有回波更新完毕。
43、本发明的有益效果:本发明的方法首先将方位回波建模为目标散射分布与天线辐射函数的卷积,然后在正则化框架下,选择尺度保真性更优的全变差范数作为约束导出优化问题,最后将矩阵求逆运算转化为矩阵乘法的迭代运算,利用实时的扫描回波有效地递归更新重建结果,实现前视区域目标实时递归更新。本发明的方法与现有批处理方法相比,在不损失成像性能的同时显著降低计算复杂度,节省运算时间,适合扫描雷达的快速成像,与现有tv正则化方法相比,则可以随着扫描回波的不断更新而加强整体的重建结果,提高重建结果的鲁棒性,同时迭代更新过程中的各个矩阵维度是固定不变的,仅需根据当前波束回波去更新,提供了恒定的计算和存储成本。
- 还没有人留言评论。精彩留言会获得点赞!