一种用于复杂刀具刃口磨损图像在机采集方法
本发明涉及用于刀具磨损检测的机械自动化技术应用领域,具体涉及一种复杂刀具刃口磨损图像在机采集方法。
背景技术:
1、近年来,随着经济社会的高速发展,我国高度重视制造业关键科技的研发,首要任务是提高加工生产领域的自动化和智能化水平。在机床加工中,刀具磨损状态对工件的加工精度和表面完整性有显著影响,刀具过度磨损将导致加工表面质量的下降,生产效率降低,加工成本增加。因此,需要在生产过程中对刀具磨损进行监测,防止因刀具磨损或刀具突然断裂,以提高制造过程的可靠性和生产质量。为降低刀具磨损对加工造成的不利影响,通常在机床停机后进行刀具磨损检测,确定刀具是否需要进行更换。据不完全统计,在加工过程中,由于更换刀具引起的机床停机时间可占总停机时间的20%,刀具成本可占总加工成本的3%至12%。因此探索有效的刀具磨损检测技术,对降低加工成本、提高加工质量与效率、发挥刀具更好的切削性能具有重要意义。
2、现有技术中检测装置的技术不足为:
3、1、传统的机械臂夹具装置是通过其末端的机械夹爪来实现刀具磨损图像采集,其具有图像采集效率慢,精度低和灵活性能弱的缺点;
4、2、传统的机械臂夹具装置通常通过调整机械臂的位姿实现在不同环境下获取有效的刀具表面磨损图像,但在检测装置过程中光源通常无法进行微调。
5、3、在刀具磨损图像检测的过程中,传统的检测过程需将刀具从刀柄拆下采集图像再进行安装,也会导致的刀具重复定位精度不高等问题。
技术实现思路
1、为了克服上述问题,本发明提出同时解决上述多种问题的方案。
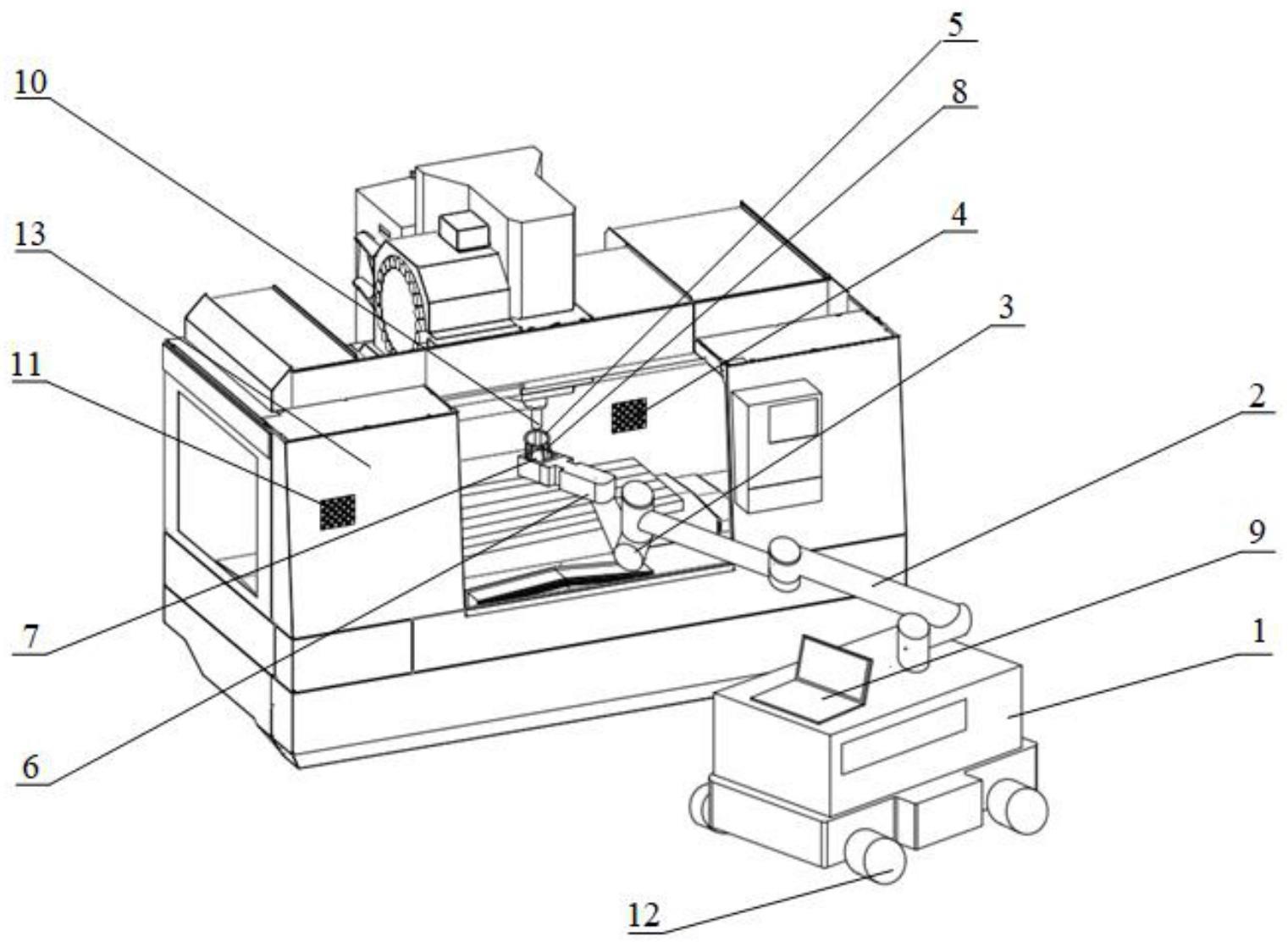
2、本发明解决其技术问题所采用的技术方案是:一种复杂刀具刃口磨损图像在机采集方法。其中包括:定位装置和检测机构。所述定位装置包括agv导引车,机械臂和定位相机;所述agv导引车通过激光雷达进行磁导航,所述agv导引车的车轮采用麦克纳姆轮,使其同时具有转向和平移的运动;此外,在agv导引车上安装有天线;所述天线可将所述agv导引车的运动与所述检测机构的工作状态建立实时传输的通讯协议,实现检测装置自动化;所述机械臂安装在agv导引车的上,具有六个转动自由度,分别为j1、j2、j3、j4、j5和j6;所述机械臂的六自由度转动是由所述通讯协议控制,从而控制所述机械臂的运动轨迹;为提高检测设备的精度,采用所述定位相机及加工机床的两个标定板进行标定,得到工业相机和远心镜头与加工机床的相对位置,以此满足设备的精度要求。
3、所述检测机构包括定位夹具,夹具装置,采集设备、调节机构和图像处理软件;所述定位夹具的结构呈t字型结构;所述t字型结构的平头端通过四个螺栓固连,代替传统的机械夹爪;所述夹具装置的上端设有所述工业相机和所述远心镜头的方形槽口和梯形槽口,以及调节机构的双头螺柱安装孔;所述梯形槽口保证所述工业相机和所述远心镜头的线束连接;所述调节机构为微调机构,所述调节机构与所述夹具装置通过六个双头螺柱螺栓连接。
4、所述采集设备包括工业相机、环形led光源和远心镜头;所述微调机构的上端安装有所述环形led光源;在采集过程中,所述环形led光源始终保持打开状态,从而实现光源的微调功能和保证所述工业相机和所述定位相机的充足光源。
5、所述工业相机和所述远心镜头对刀具进行图像采集,并将得到高清刀具表面图像并传输至pc机进行分析及测量磨损值vb,分析是否达到换刀指标;通过所述通讯协议,控制所述agv导引车的移动和所述机械臂的转动,从而实现对不同位置和环境下的刀具磨损图像进行采集;
6、进一步的,所述采集设备与图像处理机构和pc机连接,在加工机床上保持待检测刀具静止状态;所述刀具位置可利用所述定位相机和加工机床上的第一标定板和第二标定板进行标定确定;
7、进一步的,所述第一标定板和所述第二标定板平行布置;所述第一标定板和所述第二标定板大小和形状相同;
8、进一步的,所述定位夹具与所述机械臂的末端通过四个圆周分布的螺栓连接,且所述螺栓的型号相同;
9、进一步的,所述六个双头螺柱螺栓型号相同;
10、为了实现上述目的,本发明采用的技术方案是包括以下步骤:针对所述的不同类型刀具安置在机床上,所述的激光雷达磁导航的agv导引车进行运动到达提前规划好的位置。
11、采用所述的定位相机对加工机床的两个标定板进行标定,得到所述的工业相机和所述的远心镜头与加工机床的相对位置,将以所述的机械臂j1轴起始端的中心点为坐标原点对上述的相对位置进行坐标转换。得到以所述的机械臂j1轴起始点的中心点为坐标原点的坐标系。
12、根据上述的不同刀具型号,将所述的刀具的尺寸参数以及需要拍摄的所述的机械臂运动轨迹在整个定位装置工作之前,通过所述通讯协议输入到所述的机械臂控制程序内。根据不同刀具型号,控制所述的机械臂末端沿不同磨损刀具的刃线进行运动。
13、对所述的机械臂末端沿不同磨损刀具的刃线进行运动的时间进行规划,控制所述的机械臂的运动速度为匀速运动,以一秒钟为间隔,通过所述的工业相机不断的对所述的刀具的刃线进行图像采集。为了对所述的磨损刀具图像进行更好效果的采集,对采集所需的所述环形光源的角度与高度进行微调。并将采集到的图像传输到所述的pc端图像处理软件进行处理,最终输出磨损刀具的磨损值。
14、本发明的有益效果及发明点如下:
15、1、针对背景技术的第1点,通过利用所述定位夹具和机械臂的末端进行固定区域设置,取代机械夹爪,增加了安全性和操作稳定性,从而保证了检测过程中的精度和效率;通过结合所述agv导引车和六自由度机械臂的运动配合,可有效提高检测过程中的灵活性能;
16、2、针对背景技术的第2点,通过在所述定位夹具上安装有微调机构,实现了在检测装置过程中的光源微调功能,从而保证了检测图像的清晰度;
17、3、针对背景技术的第3点,通过在机械臂的末端安装有t字形结构的夹具装置,解决了传统的机械臂夹具在检测过程中需将刀具从刀柄拆下再安装的问题,降低了安装误差和进一步提高了定位精度。
18、注:上述设计不分先后,每一条都使得本发明相对现有技术具有区别和显著的进步。
技术特征:
1.一种用于复杂刀具刃口磨损图像在机采集方法,其特征在于:包括移动装置agv导引车,ur10机械臂,定位装置,采集设备,图像处理机构。机械臂安装在移动装置agv上,定位夹具安装在机械臂端口,采集设备安装在定位夹具上,定位装置安装在机械臂与定位夹具之间,采集设备与图像处理机构连接。
2.根据权利要求1所述的一种用于复杂刀具刃口磨损图像在机采集方法,具体包括如下步骤:
3.根据权利要求2所述的一种用于复杂刀具刃口磨损图像在机采集方法,其特征在于,采集设备包括环形led光源,环形led光源安装在机械臂端口定位夹具处。采集设备中环形led光源沿水平及竖直方向皆有运动自由度,可调节至不同位置。环形led光源为工业相机和腕部2d相机保证充足的光源,使图像的采集过程具有良好效率及刀具表面磨损图像具有优异的清晰度。
4.根据权利要求2所述的一种用于复杂刀具刃口磨损图像在机采集方法,所述采集设备与图像处理机构和pc机连接,在加工机床上保持待检测刀具静止状态;所述刀具位置可利用所述定位相机和加工机床上的第一标定板和第二标定板进行标定确定;所述第一标定板和所述第二标定板平行布置;所述第一标定板和所述第二标定板大小和形状相同。
5.根据权利要求2所述的一种用于复杂刀具刃口磨损图像在机采集方法,其特征在于,所述的采集设备还包括工业相机和远心镜头,用于拍摄位于加工机床上的刀具。远心镜头安置在工业相机上,且放置于采集设备的固定区域与机械臂端口定位夹具连接,采集设备整体安装在ur10机械臂上。
6.根据权利要求4所述的一种用于复杂刀具刃口磨损图像在机采集方法,所述定位夹具的结构呈t字型结构;所述t字型结构的平头端通过四个螺栓固连,代替传统的机械夹爪;所述夹具装置的上端设有所述工业相机和所述远心镜头的方形槽口和梯形槽口,以及调节机构的双头螺柱安装孔;所述梯形槽口保证所述工业相机和所述远心镜头的线束连接;所述调节机构为微调机构,所述调节机构与所述夹具装置通过六个双头螺柱螺栓连接。
技术总结
本发明公开了一种用于复杂刀具刃口磨损图像在机采集方法。其中包括:定位装置、检测机构。定位装置包括AGV导引车,机械臂和定位相机。检测机构包括定位夹具,夹具装置,采集设备、调节机构和图像处理软件,其中采集设备包括工业相机、环形LED光源和远心镜头。通过通讯协议,控制AGV导引车的移动和机械臂的转动,从而实现对不同位置和环境下的刀具磨损图像进行采集,并将得到高清刀具表面图像并传输至PC机进行分析及测量磨损值VB,分析是否达到换刀指标。
技术研发人员:岳彩旭,周佳琪,曲家绪,夏伟
受保护的技术使用者:哈尔滨理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!