一种基于无人机的船舶助降灯光系统检验方法与流程
本发明涉及一种基于无人机的船舶助降灯光系统检验方法,属于船舶检验领域。
背景技术:
1、船舶的直升机助降灯光系统作为直升机平台系统的重要组成部分,其主要任务是船舶夜间或能见度低情况下,为起降、作业任务的直升机驾驶员和甲板工作人员提供多种灯光信号,保障直升机安全起降任务。一般船舶在建造完工后,须进行系泊、航行试验,以检验系统、设备的成套性、安装质量、主要技术指标及运行的稳定性和可靠性。在航行试验期间须对直升机静态、动态助降灯光系统能见距离、灯光角度和灯光颜色进行检验。目前交验方法存在如下不足:
2、(1)在传统试验过程中,需要船舶驶入指定海域,向相关部门协调直升飞机进行协助试验,通常同时满足试验的飞机、天气状况、人力资源等条件苛刻。其人力协调复杂、效率低下、造成资源浪费。
3、(2)在传统试验中助降灯光系统一般安排在航行试验阶段,对于基于无人机的检验方法可将船舶系泊、锚泊、低速机动航行在视野空旷场所即可。试验过程更佳灵活、便捷。
4、(3)传统试验需要提前进行人力协调,对船舶航行试验计划安排时效性较差,不利于整体航行试验计划安排。
5、(4)试验期间,船舶塔台参试人员较多、环境嘈杂,不利于引航员与直升机飞行员之间沟通,直升机需要多次经过船舶顶部来回试验,试验成功率低。
6、(5)传统试验是直升机自船舶尾部进入船舶助降灯光系统,飞机按船舶纵穿船舶顶部观察灯光,无法完整验证助降灯光发光角度,不能满足直升机从不同方向进入船舶实际情况验证。
技术实现思路
1、本发明要解决的技术问题是:按实际驾驶直升机进行船载助降灯光系统的交验方式具有经济成本高、安全性低、效率低、兵力协调难度大、试验验证不足等缺点。
2、为了解决上述技术问题,本发明的技术方案是提供了一种基于无人机的船舶助降灯光系统检验方法,其特征在于,采用无人机视觉系统对船舶助降灯光系统进行检验,包括以下步骤:
3、步骤1、按船舶动态、静态助降灯光灯具布置,分别绘制船舶助降灯光系统中各设备在船舶安装位置;
4、步骤2、船舶系泊、锚泊或低速机动航行在较为空旷场所,确保自无人机视野观察船舶灯光系统无遮挡;
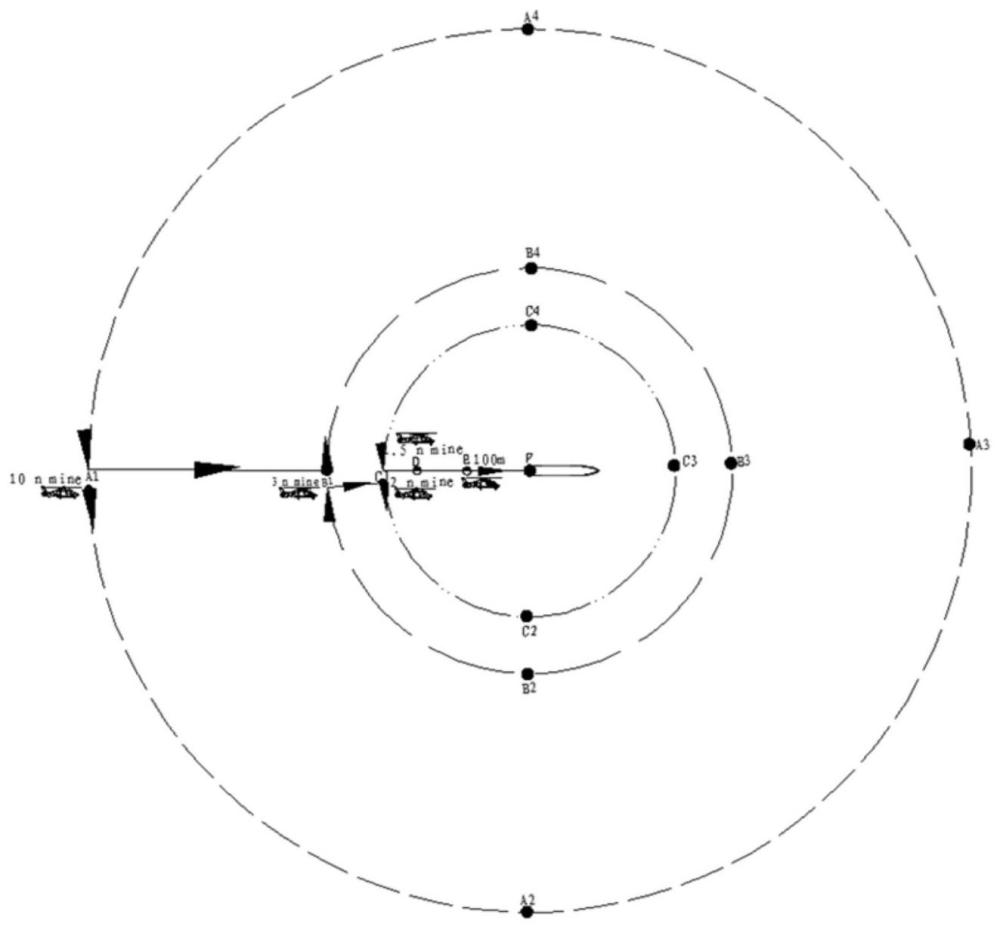
5、步骤3、以船舶直升机起降甲板位中心,绘制距离船舶an mine、b n mine、cn mine的圆形规划路线,a>b>c;
6、步骤4、在距离船舶an mine的圆形规划路线一上确定n1处母船标志灯灯光观察点,遥控无人机按圆形规划路线一运动,在各母船标志灯灯光观察点处对母船标志灯灯光进行检验,n1≥2;
7、步骤5、在距离船舶bn mine的圆形规划路线二上确定n2处机库障碍灯、桅杆障碍灯灯光观察点,遥控无人机按圆形规划路线二运动,在各机库障碍灯、桅杆障碍灯灯光观察点处对机库障碍灯、桅杆障碍灯灯光进行检验,n2≥2;
8、在距离船舶bn mine的圆形规划路线二上确定一处下滑角指示器灯光观察点,遥控无人机运动至在下滑角指示器灯光观察点处,依据下滑指示器灯光角度要求在距离水平面高度为h1的位置对下滑角指示器灯光进行检验;
9、步骤6、在距离船舶cn mine的圆形规划路线三上确定n3处船艉示廓灯、机库后壁轮廓灯灯光观察点,遥控无人机按圆形规划路线二运动,在各船艉示廓灯、机库后壁轮廓灯灯光观察点处对船艉示廓灯、机库后壁轮廓灯灯光进行检验,n3≥2;
10、步骤7、在距离船舶dn mine的规划路线一上确定一处平台边界灯、前极限位灯和起降信号灯灯光观察点以及一处下滑角指示器灯灯光观察点,d<c;遥控无人机按规划路线一运动至平台边界灯、前极限位灯和起降信号灯灯光观察点处时,对平台边界灯、前极限位灯和起降信号灯灯光进行检验;遥控无人机按规划路线一运动至下滑角指示器灯灯光观察点处,依据下滑指示器灯光角度要求在距离水平面高度为h2的位置对下滑角指示器灯光进行检验;
11、步骤8、在距离船舶em的规划路线二上确定一处下滑角指示器、横摇指示器灯灯光观察点,遥控无人机按规划路线二运动至下滑角指示器、横摇指示器灯处时,对横摇指示器灯灯光进行检验,并依据下滑指示器灯光角度要求在距离水平面高度为h3的位置对下滑角指示器灯光进行检验;
12、步骤9、按规划路线三,确定一处悬停加油航向灯灯光观察点,遥控无人机按规划路线三运动至悬停加油航向灯灯光观察点处,对悬停加油航向灯灯光进行检验。
13、优选地,步骤1中,所述船舶助降灯光系统中各设备包括平台边界灯、前极限位灯、机库障碍灯、悬停加油航向灯、起降信号灯、桅杆障碍灯、母船标志灯、船艉示廓灯、机库后壁轮廓灯、下滑角指示器以及横摇指示器。
14、优选地,步骤3中,绘制距离船舶10n mine、3n mine、2n mine的圆形规划路线。
15、优选地,步骤4中,所述n1处母船标志灯灯光观察点沿所述圆形规划路线一均匀分布。
16、优选地,步骤5中,所述n2处机库障碍灯、桅杆障碍灯灯光观察点沿所述圆形规划路线二均匀分布。
17、优选地,步骤5中,h1确定为3n mine乘以tan14°;步骤7中,h2确定为1.5n mine乘以tan6°;步骤8中,h3确定为100m乘以tan4°。
18、优选地,步骤5中,将n2处机库障碍灯、桅杆障碍灯灯光观察点中的一处机库障碍灯、桅杆障碍灯灯光观察点同时作为所述下滑角指示器灯光观察点。
19、优选地,步骤6中,所述n3处船艉示廓灯、机库后壁轮廓灯灯光观察点沿所述圆形规划路线三均匀分布。
20、优选地,步骤7中,所述平台边界灯、前极限位灯和起降信号灯灯光观察点与所述下滑角指示器灯灯光观察点重合。
21、优选地,步骤9中,所述悬停加油航向灯灯光观察点的位置比所述下滑角指示器、横摇指示器灯灯光观察点的位置更靠近船舶。
22、本发明公开的交验方法提高了工作效率和工作时效性,降低了资源消耗和经济成本,提高了试验成功率,且试验验证更全面。
技术特征:
1.一种基于无人机的船舶助降灯光系统检验方法,其特征在于,采用无人机视觉系统对船舶助降灯光系统进行检验,包括以下步骤:
2.如权利要求1所述的一种基于无人机的船舶助降灯光系统检验方法,其特征在于,步骤1中,所述船舶助降灯光系统中各设备包括平台边界灯、前极限位灯、机库障碍灯、悬停加油航向灯、起降信号灯、桅杆障碍灯、母船标志灯、船艉示廓灯、机库后壁轮廓灯、下滑角指示器以及横摇指示器。
3.如权利要求1所述的一种基于无人机的船舶助降灯光系统检验方法,其特征在于,步骤3中,绘制距离船舶10n mine、3n mine、2n mine的圆形规划路线。
4.如权利要求1所述的一种基于无人机的船舶助降灯光系统检验方法,其特征在于,步骤4中,所述n1处母船标志灯灯光观察点沿所述圆形规划路线一均匀分布。
5.如权利要求1所述的一种基于无人机的船舶助降灯光系统检验方法,其特征在于,步骤5中,所述n2处机库障碍灯、桅杆障碍灯灯光观察点沿所述圆形规划路线二均匀分布。
6.如权利要求1所述的一种基于无人机的船舶助降灯光系统检验方法,其特征在于,步骤5中,h1确定为3n mine乘以tan14°;步骤7中,h2确定为1.5nmine乘以tan6°;步骤8中,h3确定为100m乘以tan4°。
7.如权利要求1所述的一种基于无人机的船舶助降灯光系统检验方法,其特征在于,步骤5中,将n2处机库障碍灯、桅杆障碍灯灯光观察点中的一处机库障碍灯、桅杆障碍灯灯光观察点同时作为所述下滑角指示器灯光观察点。
8.如权利要求1所述的一种基于无人机的船舶助降灯光系统检验方法,其特征在于,步骤6中,所述n3处船艉示廓灯、机库后壁轮廓灯灯光观察点沿所述圆形规划路线三均匀分布。
9.如权利要求1所述的一种基于无人机的船舶助降灯光系统检验方法,其特征在于,步骤7中,所述平台边界灯、前极限位灯和起降信号灯灯光观察点与所述下滑角指示器灯灯光观察点重合。
10.如权利要求1所述的一种基于无人机的船舶助降灯光系统检验方法,其特征在于,步骤9中,所述悬停加油航向灯灯光观察点的位置比所述下滑角指示器、横摇指示器灯灯光观察点的位置更靠近船舶。
技术总结
本发明公开了一种基于无人机的船舶助降灯光系统检验方法,其特征在于,采用无人机视觉系统对船舶助降灯光系统进行检验,包括以下步骤:按船舶动态、静态助降灯光灯具布置,分别绘制船舶助降灯光系统中各设备在船舶安装位置;以船舶直升机起降甲板位中心,绘制距离船舶An mine、B n mine、Cn mine的圆形规划路线,A>B>C,在圆形规划路线分别设置不同的观察点。本发明公开的交验方法提高了工作效率和工作时效性,降低了资源消耗和经济成本,提高了试验成功率,且试验验证更全面。
技术研发人员:汪成义,罗伯坤,王庆,沈杰,边大伟,徐成
受保护的技术使用者:中国船舶集团有限公司第七○八研究所
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!