一种高频动态目标基准位置估测方法及计算机可读介质
本发明属于全球卫星导航系统领域,尤其涉及一种高频动态目标基准位置估测方法及计算机可读介质。
背景技术:
1、北斗/ins融合定位已经广泛应用到机器人、移动测图、车载导航等多个领域,在环境复杂、高频动态定位、运动无规律的动态应用中,北斗与ins是绝佳组合。动动相对定位技术选定动态基准站作为基准,实时更新自身位置并以此作为位置基准,通过相对定位解算动态位置结果,为动态目标间协同作业提供安全有效保障。动动相对定位中基站处于运动状态,现有方法通常是利用北斗/gnss spp计算3-10m精度的绝对位置,把绝对位置结果作为相对定位位置基准,存在以下问题:无法保证复杂时变环境下动态位置基准的稳定性和可靠性;没有融合ins,得不到高频的动态位置基准,进而无法解算高频的相对位置结果;基于相对定位的无人机动态位置结果也会随移动平台的位置基准随机抖动,无法完成对无人机降落的精确控制。虽然以上问题可以通过实时ppp解算来削弱,但实时ppp初始化时间较长,实时解算需要额外的北斗ssr改正数,对互联网通信要求较高。
2、针对以上问题,tang等提出了北斗/ins融合的动态基准位置解算tdcp/ins方法,利用spp和tdcp分别解算得到初始动态位置和高精度的位置变化量,并融合ins获得高频稳定的动态基准位置结果,虽然与“真实”动态位置存在固定偏移量,但不影响动态基准位置结果与实际运动状态的一致性。然而该方法采用松组合的模式,组合性能严重依赖于北斗/tdcp精度,在城市街道、树木遮挡等相对复杂观测环境下,难以保证结果的稳定性和可靠性。紧组合能够克服松组合的缺陷,可用卫星数不足4颗也能进行组合解算,但是计算压力大,数据处理要求高。因此,如何保证复杂时变环境下动态基准位置的稳定性是动动相对定位首要解决难题。
技术实现思路
1、本发明针对复杂时变环境下,动态目标的基准位置结果与实际运动状态不一致的问题,提出了一种高频动态目标基准位置估测方法及计算机可读介质。
2、本发明方法的技术方案为一种高频动态目标基准位置估测方法,其特征在于,包括:
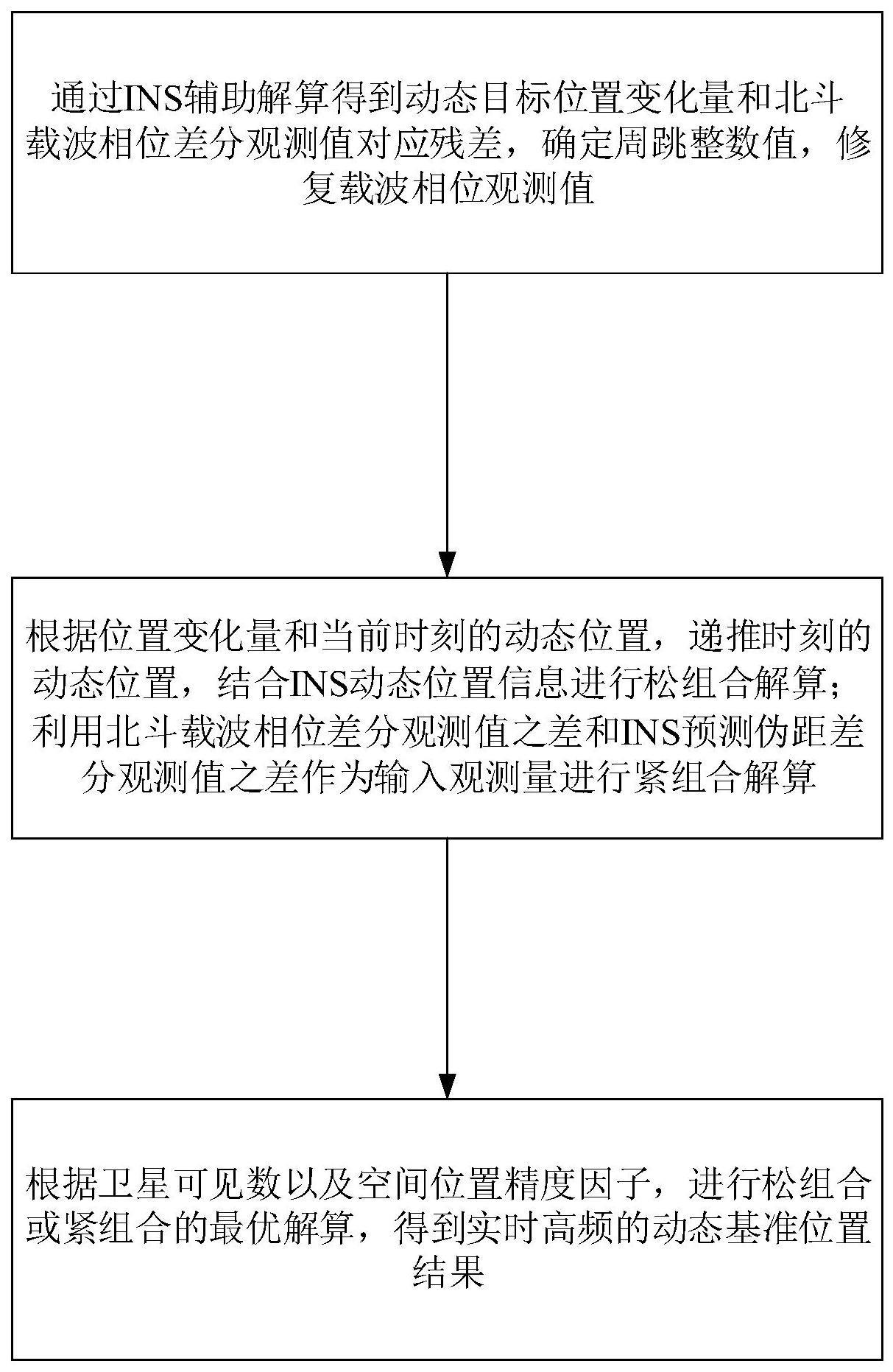
3、获取每颗卫星多个观测时刻的北斗载波相位观测值,通过最小二乘解算,得到动态目标相邻两个观测时刻间的位置变化量和每颗卫星北斗载波相位差分观测值对应残差,通过卡方检验残差确定周跳类型卫星对周跳数进行参数估计,通过lambda整数固定周跳整数值,修复每颗卫星每个观测时刻的北斗载波相位观测值,得到每颗卫星每个观测时刻高精度的北斗载波相位观测值;
4、根据当前观测时刻的动态位置结合当前观测时刻与下一观测时刻之间的高精度位置变化量递推得到第下一观测时刻的动态位置,利用卫星和ins下一观测时刻的动态位置信息构建松组合观测方程,利用ins动态位置预测当前和下一观测时刻的伪距观测值计算其相邻两个观测时刻的伪距差分观测值,利用卫星间北斗载波相位差分观测值之差和ins预测伪距差分观测值之差作为输入观测量构建紧组合观测方程;
5、根据下一观测时刻动态目标的卫星可见数以及空间位置精度因子,利用中文描述进行动态基准位置最优解算,结合ins机械编排得到的动态位置,获得动态目标当观测时刻与下一观测时刻之间间实时高频的动态基准位置结果。
6、本发明具体步骤如下:
7、步骤1:获取每颗卫星多个观测时刻的北斗载波相位观测值,计算每颗卫星相邻两个观测时刻的北斗载波相位差分观测值,获取ins多个观测时刻的动态位置,计算ins相邻两个观测时刻的高精度位置变化量,联合每颗卫星的北斗载波相位差分观测值作为输入观测量,通过最小二乘解算,得到动态目标相邻两个观测时刻间的位置变化量和每颗卫星北斗载波相位差分观测值对应残差,通过卡方检验残差确定周跳类型卫星,对周跳数进行参数估计,通过lambda整数固定周跳整数值,修复每颗卫星每个观测时刻的北斗载波相位观测值,得到每颗卫星每个观测时刻高精度的北斗载波相位观测值;
8、步骤2:根据每颗卫星每个观测时刻高精度的北斗载波相位观测值,计算卫星之间的相邻两个观测时刻的高精度北斗载波相位差分观测值,利用卫星间北斗载波相位差分观测值之差作为输入观测量,通过最小二乘解算得到位置变化量,根据当前观测时刻的动态位置结合当前观测时刻与下一观测时刻之间的高精度位置变化量递推得到第下一观测时刻的动态位置,利用卫星和ins下一观测时刻的动态位置信息构建松组合观测方程,利用ins动态位置预测当前和下一观测时刻的伪距观测值计算其相邻两个观测时刻的伪距差分观测值,利用卫星间北斗载波相位差分观测值之差和ins预测伪距差分观测值之差作为输入观测量构建紧组合观测方程;
9、步骤3:根据下一观测时刻动态目标的卫星可见数以及空间位置精度因子,利用前述步骤2的中文描述进行动态基准位置最优解算,结合ins机械编排得到的动态位置,获得动态目标当观测时刻与下一观测时刻之间间实时高频的动态基准位置结果。
10、作为优选,步骤1所述通过ins辅助修复每颗卫星每个观测时刻的北斗载波相位观测值,具体如下:
11、步骤1.1:对每颗卫星北斗载波相位差分观测值对应残差进行卡方检验,若卡方检验不通过时,残差最大值对应的卫星观测值标记为周跳类型,在状态向量中增加新的周跳参数,解算得到周跳类型卫星的周跳浮点值。
12、步骤1.2:重复步骤1.1解算直到每颗卫星北斗载波相位差分观测值对应残差通过卡方检验,根据步骤1.2标记的结果,对发生周跳卫星的周跳浮点值进行lambda整数固定获得周跳的整数值,修复相应卫星的北斗载波相位观测值,得到高精度的载波相位观测值。
13、作为优选,步骤2所述计算卫星之间的相邻两个观测时刻的高精度北斗载波相位差分观测值,具体如下:
14、计算卫星i和卫星j的相邻两个观测时刻的高精度北斗载波相位差分观测值,将北斗载波相位差分观测值进行作差,表示为:
15、
16、其中,nt表示观测时刻的数量,λ表示波长,i表示第i颗卫星,j表示第j颗卫星,i∈[1,n],j∈[1,m],i≠j,n和m分别表示卫星数量,表示第k与k+1观测时刻间卫星i与j载波相位差分观测值之差,
17、
18、其中,表示第k观测时刻间卫星i的载波相位观测值,表示第k+1观测时刻间卫星i的载波相位观测值,表示第k观测时刻间卫星j的载波相位观测值,表示第k+1观测时刻间卫星j的载波相位观测值。
19、表示第k与k+1观测时刻间卫星i的方向余弦之差;
20、
21、
22、
23、其中,表示第k与k+1观测时刻间卫星i的方向余弦之差,表示第k观测时刻动态位置的x轴坐标,表示第k观测时刻动态位置的y轴坐标,表示第k观测时刻动态位置的z轴坐标,表示第k观测时刻卫星i轨道的x轴坐标,表示第k观测时刻卫星i轨道的y轴坐标,表示第k观测时刻卫星i轨道的z轴坐标,表示第k观测时刻动态位置与卫星i间的距离;
24、表示第k+1观测时刻动态位置的x轴坐标,表示第k+1观测时刻动态位置的y轴坐标,表示第k+1观测时刻动态位置的z轴坐标,表示第k+1观测时刻卫星i轨道的x轴坐标,表示第k+1观测时刻卫星i轨道的y轴坐标,表示第k+1观测时刻卫星i轨道的z轴坐标,表示第k+1观测时刻动态位置与卫星i间的距离;
25、
26、
27、
28、其中,表示第k与k+1观测时刻间卫星j的方向余弦之差,表示第k观测时刻动态位置的x轴坐标,表示第k观测时刻动态位置的y轴坐标,表示第k观测时刻动态位置的z轴坐标,表示第k观测时刻卫星j轨道的x轴坐标,表示第k观测时刻卫星j轨道的y轴坐标,表示第k观测时刻卫星j轨道的z轴坐标,表示第k观测时刻动态位置与卫星j间的距离。表示第k+1观测时刻动态位置的x轴坐标,表示第k+1观测时刻动态位置的y轴坐标,表示第k+1观测时刻动态位置的z轴坐标,表示第k+1观测时刻卫星j轨道的x轴坐标,表示第k+1观测时刻卫星j轨道的y轴坐标,表示第k+1观测时刻卫星j轨道的z轴坐标,表示第k+1观测时刻动态位置与卫星j间的距离;
29、表示第k与k+1观测时刻间的位置变化量,表示第k与k+1观测时刻间卫星i与j的载波相位差分观测值残差之差,k表示第k个观测时刻,k+1表示第k+1个观测时刻;
30、
31、其中,xk表示第k观测时刻间动态位置的x轴坐标,xk+1表示第k+1观测时刻间动态位置的x轴坐标,yk表示第k观测时刻间动态位置的y轴坐标,yk+1表示第k+1观测时刻间动态位置的y轴坐标,zk表示第k观测时刻间动态位置的z轴坐标,zk+1表示第k+1观测时刻间动态位置的z轴坐标。
32、
33、其中,表示第k观测时刻间卫星i的载波相位观测值残差,表示第k+1观测时刻间卫星i的载波相位观测值残差,表示第k观测时刻间卫星j的载波相位观测值残差,表示第k+1观测时刻间卫星j的载波相位观测值残差。
34、步骤2所述利用卫星间北斗载波相位差分观测值之差作为输入观测量,通过最小二乘解算得到位置变化量,具体如下:
35、
36、其中,表示第k与k+1观测时刻间的位置变化量,δxk,k+1表示第k与k+1观测时刻间位置变化量的x轴坐标,δyk,k+1表示第k与k+1观测时刻间位置变化量的y轴坐标,δzk,k+1表示第k与k+1观测时刻间位置变化量的z轴坐标,k表示第k个观测时刻,k+1表示第k+1个观测时刻;
37、步骤2所述根据当前观测时刻的动态位置结合当前观测时刻与下一观测时刻之间的高精度位置变化量递推得到第下一观测时刻的动态位置,具体如下:
38、
39、其中,表示第k+1观测时刻间的动态位置,(xk+1,yk+1,zk+1)表示第k+1观测时刻的动态位置,xk+1表示第k+1观测时刻动态位置的x轴坐标,yk+1表示第k+1观测时刻动态位置的y轴坐标,zk+1表示第k+1观测时刻动态位置的z轴坐标,δxk,k+1表示第k与k+1观测时刻间位置变化量的x轴坐标,δyk,k+1表示第k与k+1观测时刻间位置变化量的y轴坐标,δzk,k+1表示第k与k+1观测时刻间位置变化量的z轴坐标,(xk,yk,zk)表示第k观测时刻的动态位置,xk表示第k观测时刻动态位置的x轴坐标,yk表示第k观测时刻动态位置的y轴坐标,zk表示第k观测时刻动态位置的z轴坐标,k表示第k个观测时刻,k+1表示第k+1个观测时刻。
40、根据k+1观测时刻的状态向量xk+1,具体如下:
41、
42、其中,xk+1表示第k+1观测时刻的状态向量,δrk+1表示第k+1观测时刻的位置参数,δvk+1表示第k+1观测时刻的速度参数,δφk+1表示第k+1观测时刻的姿态参数,表示第k+1观测时刻的陀螺零偏参数,表示第k+1观测时刻的加计零偏参数,k+1表示第k+1个观测时刻。
43、步骤2所述利用卫星和ins第下一观测时刻的动态位置信息构建松组合观测方程,具体如下:
44、
45、其中,zk+1表示第k+1观测时刻的松组合观测向量,和分别表示第k+1观测时刻的动态位置、ins动态位置,根据状态向量和松组合观测方程,利用zk+1观测向量作为输入观测量,通过扩展卡尔曼滤波解算得到位置结果;
46、步骤2所述利用ins动态位置预测当前和下一观测时刻的伪距观测值计算其相邻两个观测时刻的伪距差分观测值,具体如下:
47、卫星i与j分别利用ins动态位置预测第k和k+1观测时刻的伪距观测值,计算其相邻两个观测时刻的伪距差分观测值,卫星i与j伪距差分观测值之差表示为:
48、
49、其中,i表示第i颗卫星,j表示第j颗卫星,i∈[1,n],j∈[1,m],i≠j,n和m表示卫星数量,n≤60,m≤60,表示第k与k+1观测时刻间卫星i与j伪距差分观测值之差;
50、表示第k与k+1观测时刻间卫星i的方向余弦之差,具体如下:
51、
52、
53、
54、其中,表示第k观测时刻ins动态位置的x轴坐标,表示第k观测时刻ins动态位置的y轴坐标,表示第k观测时刻ins动态位置的z轴坐标,表示第k观测时刻卫星i轨道的x轴坐标,表示第k观测时刻卫星i轨道的y轴坐标,表示第k观测时刻卫星i轨道的z轴坐标,表示第k观测时刻ins动态位置与卫星i间的距离。表示第k+1观测时刻ins动态位置的x轴坐标,表示第k+1观测时刻ins动态位置的y轴坐标,表示第k+1观测时刻ins动态位置的z轴坐标,表示第k+1观测时刻卫星i轨道的x轴坐标,表示第k+1观测时刻卫星i轨道的y轴坐标,表示第k+1观测时刻卫星i轨道的z轴坐标,表示第k+1观测时刻ins动态位置与卫星i间的距离;
55、表示第k与k+1观测时刻间卫星j的方向余弦之差,具体如下:
56、
57、
58、
59、其中,表示第k观测时刻ins动态位置的x轴坐标,表示第k观测时刻ins动态位置的y轴坐标,表示第k观测时刻ins动态位置的z轴坐标,表示第k观测时刻卫星j轨道的x轴坐标,表示第k观测时刻卫星j轨道的y轴坐标,表示第k观测时刻卫星j轨道的z轴坐标,表示第k观测时刻ins动态位置与卫星j间的距离。表示第k+1观测时刻ins动态位置的x轴坐标,表示第k+1观测时刻ins动态位置的y轴坐标,表示第k+1观测时刻目标动态位置的z轴坐标,表示第k+1观测时刻卫星j轨道的x轴坐标,表示第k+1观测时刻卫星j轨道的y轴坐标,表示第k+1观测时刻卫星j轨道的z轴坐标,表示第k+1观测时刻ins动态位置与卫星j间的距离。
60、表示第k与k+1观测时刻间的位置变化量,表示第k与k+1观测时刻间卫星i与j的伪距差分观测值残差之差,具体计算如下:
61、
62、其中,表示第k观测时刻间卫星i的伪距观测值残差,表示第k+1观测时刻间卫星i的伪距观测值残差,表示第k观测时刻间卫星j的伪距观测值残差,表示第k+1观测时刻间卫星j的伪距观测值残差,k表示第k个观测时刻,k+1表示第k+1个观测时刻;
63、步骤2所述利用卫星间北斗载波相位差分观测值之差和ins预测伪距差分观测值之差作为输入观测量构建紧组合观测方程,具体为:
64、
65、其中,zk+1表示第k+1观测时刻的观测向量,根据状态向量和紧组合观测方程,利用zk+1观测向量作为输入观测量,通过扩展卡尔曼滤波解算得到位置结果;
66、本发明还提供了一种计算机可读介质,所述计算机可读介质存储电子设备执行的计算机程序,当所述计算机程序在电子设备上运行时,执行所述高频动态目标基准位置估测方法的步骤。
67、本发明产生的有益效果是:
68、本发明提出了一种北斗/ins半紧组合实时高频动态目标基准位置解算方案,相比于传统动态基准位置解算,确保动态基准位置与实际运动轨迹一致,为相对定位提供高频稳定动态基准。
69、本发明根据不同观测条件,兼顾北斗/ins松组合和紧组合两者优势,实现高频动态基准位置最优解,时效性高,适用于复杂时变环境。
- 还没有人留言评论。精彩留言会获得点赞!