一种水位监测方法、系统、设备及介质与流程
本发明涉及机器视觉,尤其是一种水位监测方法、系统、设备及介质。
背景技术:
1、近年来,随着社会科技的不断发展,基于机器视觉技术来实现水域水位的监测的场景越发常见。传统的基于机器视觉技术来实现水域水位的监测主要有两种监测方式,分为有标尺水位监测和无标尺水位监测。
2、目前,对于无标尺水位监测这一种监测方式,现有的实现方式有以下两种:
3、第一种实现方式为人工水位线标定法,即采用人工方式,采用rtk等测量设备,对岸边进行多个标志点的高度标定,然后通过机器视觉技术识别水-岸交界线,通过对照预先标定值,将水位线在图像中的像素位置变化换算成真实物理空间下的水位高度变化,从而计算得出水位。该方法需要大量现场标定工作,对于河岸环境复杂,难以标定的情况时,该方法无法使用。
4、第二种实现方式为结构光投影法,其原理是通过结构光发射装置,将预设的图案(如特定形状光斑、条纹)向水面投影,然后通过在不同水位下,对特定图案变化的检测(或者利用多目摄像机对图案进行测距),从而获得水位值。但是该方法由于增加了结构光生成装置,成本和功耗更高,且在水面折射率高、反射率较低、阳光等自然光干扰较强等情况下,该方法并不能实现对水位的准确测量,准确度较低。
5、因此,现有技术存在的问题还亟需解决和优化。
技术实现思路
1、本发明的目的在于至少一定程度上解决相关技术中存在的技术问题之一。
2、为此,本发明实施例的第一个目的在于提供一种水位监测方法,该水位监测方法可以有效降低水位监测所需的成本和功耗,减少水位监测的场景限制,有效提高水位测量的准确度。
3、本技术实施例的第二个目的在于提供一种水位监测系统。
4、为了达到上述技术目的,本技术实施例所采取的技术方案包括:
5、第一方面,本技术实施例提供了一种水位监测方法,所述水位监测方法包括:
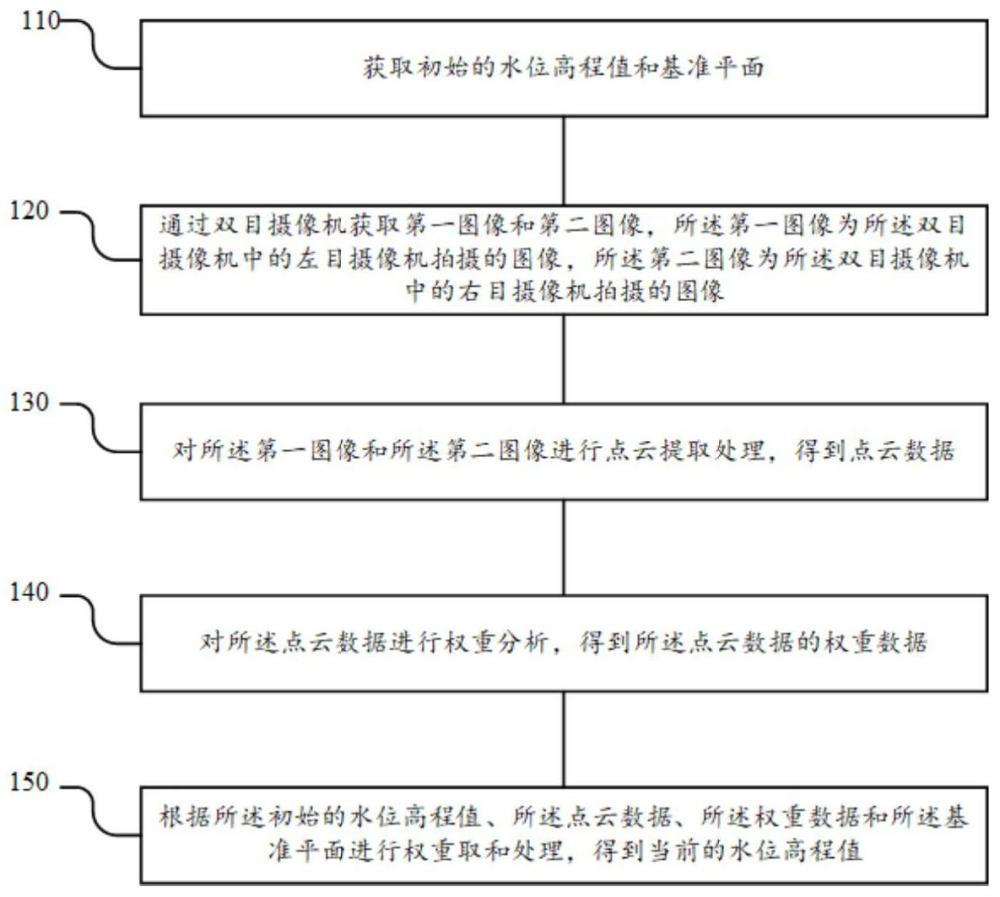
6、获取初始的水位高程值和基准平面;
7、通过双目摄像机获取第一图像和第二图像,所述第一图像为所述双目摄像机中的左目摄像机拍摄的图像,所述第二图像为所述双目摄像机中的右目摄像机拍摄的图像;
8、对所述第一图像和所述第二图像进行点云提取处理,得到点云数据;
9、对所述点云数据进行权重分析,得到所述点云数据的权重数据;
10、根据所述初始的水位高程值、所述点云数据、所述权重数据和所述基准平面进行权重取和处理,得到当前的水位高程值。
11、另外,根据本技术上述实施例的水位监测方法,还可以具有以下附加的技术特征:
12、进一步地,在本技术的一个实施例中,所述获取基准平面,包括:
13、通过所述双目摄像机获取第三图像和第四图像,所述第三图像为所述双目摄像机中的左目摄像机拍摄的图像,所述第四图像为所述双目摄像机中的右目摄像机拍摄的图像;
14、根据所述第三图像和所述第四图像获取像素点对,所述像素点对用于表征所述第三图像和所述第四图像之间具有相互匹配关系的像素点,在所述第三图像的像素坐标和所述第四图像的像素坐标的集合;
15、对所述像素点对进行距离处理,得到所述像素点的深度距离,以及根据所述深度距离和所述像素点对生成所述像素点的点云坐标;
16、根据所述像素点的点云坐标确定所述基准平面。
17、进一步地,在本技术的一个实施例中,所述对所述第一图像和所述第二图像进行点云提取处理,得到点云数据,包括:
18、对所述第一图像进行特征增强处理,得到第一特征图像,以及对所述第二图像进行特征增强处理,得到第二特征图像;
19、根据所述第二特征图像中的第二图块,对所述第一特征图像中的第一图块进行相似度配准处理,若所述第一图块和所述第二图块的相似度小于预设的第一阈值,则根据所述第一图块的坐标和所述第二图块的坐标,得到所述点云数据,其中,所述第一图块的大小和所述第二图块的大小相同。
20、进一步地,在本技术的一个实施例中,所述对所述第一图像进行特征增强处理,得到第一特征图像,包括:
21、对所述第一图像进行裁切,得到若干个大小相等的裁剪图块;
22、对所有所述裁剪图块进行残差注意力编码,得到所有所述裁剪图块的特征向量;
23、对所有所述裁剪图块的特征向量进行残差注意力解码,得到若干个特征图块;
24、对所有所述特征图块进行拼接,得到所述第一特征图像。
25、进一步地,在本技术的一个实施例中,所述根据所述第一图块的坐标和所述第二图块的坐标,得到所述点云数据,包括:
26、根据预设的监测阈值和所述基准平面确定所述双目摄像机的监测范围;
27、根据所述监测范围对所述第一图块的坐标和第二图块的坐标进行筛选处理,得到所述点云数据。
28、进一步地,在本技术的一个实施例中,所述对所述点云数据进行权重分析,得到所述点云数据的权重数据,包括:
29、对所述点云数据依次进行坐标转换处理和归一化处理,得到第一点云数据;
30、将所述第一点云数据输入至点云权重模型,得到所述第一点云数据的中间权重;
31、根据所述点云数据和所述基准平面,得到与所述点云数据对应的第一距离;
32、根据所述第一距离和所述中间权重,生成所述点云数据的权重数据。
33、进一步地,在本技术的一个实施例中,所述根据所述初始的水位高程值、所述点云数据、所述权重数据和所述基准平面进行权重取和处理,得到当前的水位高程值,包括:
34、根据所述点云数据和所述基准平面,得到与所述点云数据对应的第二距离;
35、对所述第二距离和所述权重数据进行乘积累加运算,得到水位偏差值;
36、根据所述水位偏差值和所述初始的水位高程值,得到所述当前的水位高程值。
37、第二方面,本技术实施例提供了一种水位监测系统,包括:
38、第一获取模块,用于获取初始的水位高程值和基准平面;
39、第二获取模块,用于通过双目摄像机获取第一图像和第二图像,所述第一图像为所述双目摄像机中的左目摄像机拍摄的图像,所述第二图像为所述双目摄像机中的右目摄像机拍摄的图像;
40、第一处理模块,用于对所述第一图像和所述第二图像进行点云提取处理,得到点云数据;
41、分析模块,用于对所述点云数据进行权重分析,得到所述点云数据的权重数据;
42、第二处理模块,用于根据所述初始的水位高程值、所述点云数据、所述权重数据和所述基准平面进行权重取和处理,得到当前的水位高程值。
43、第三方面,本技术实施例还提供了一种计算机设备,包括:
44、至少一个处理器;
45、至少一个存储器,用于存储至少一个程序;
46、当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现上述的水位监测方法。
47、第四方面,本技术实施例还提供了一种计算机可读存储介质,其中存储有处理器可执行的程序,所述处理器可执行的程序在由所述处理器执行时用于实现上述的水位监测方法。
48、本技术的优点和有益效果将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到:
49、本技术实施例所公开的一种水位监测方法,通过获取初始的水位高程值和基准平面;通过双目摄像机获取第一图像和第二图像,所述第一图像为所述双目摄像机中的左目摄像机拍摄的图像,所述第二图像为所述双目摄像机中的右目摄像机拍摄的图像;对所述第一图像和所述第二图像进行点云提取处理,得到点云数据;对所述点云数据进行权重分析,得到所述点云数据的权重数据;根据所述初始的水位高程值、所述点云数据、所述权重数据和所述基准平面进行权重取和处理,得到当前的水位高程值。该水位监测方法可以有效降低水位监测所需的成本和功耗,减少水位监测的场景限制,有效提高对水位的测量准确度。
- 还没有人留言评论。精彩留言会获得点赞!