一种基于环形PD的SERF惯性装置的全光路功率稳定系统
本发明涉及原子自旋惯性测量,特别是一种基于环形pd的serf惯性装置的全光路功率稳定系统,通过对抽运和检测激光进行扩束后,利用液晶相位延迟器(liquidcrystal variable retarder,lcvr)作为执行器,将光电探测器(photodetector,pd)作为信号采集器,能够有效提高serf(spin-exchange relaxation-free,无自旋交换弛豫)原子自旋惯性测量装置输出信号的长期稳定,可广泛应用于惯性导航、定姿、定向系统中。
背景技术:
1、导航技术对国民经济发展和国防建设的战略意义重大。基于无自旋交换弛豫(spin-exchange-relaxation-free,serf)效应的原子自旋惯性测量装置,是一种通过原子自旋系综来敏感角速率变化,利用电信号反馈角速率信号,实现角速率信号高精度测量的新型惯性测量系统。
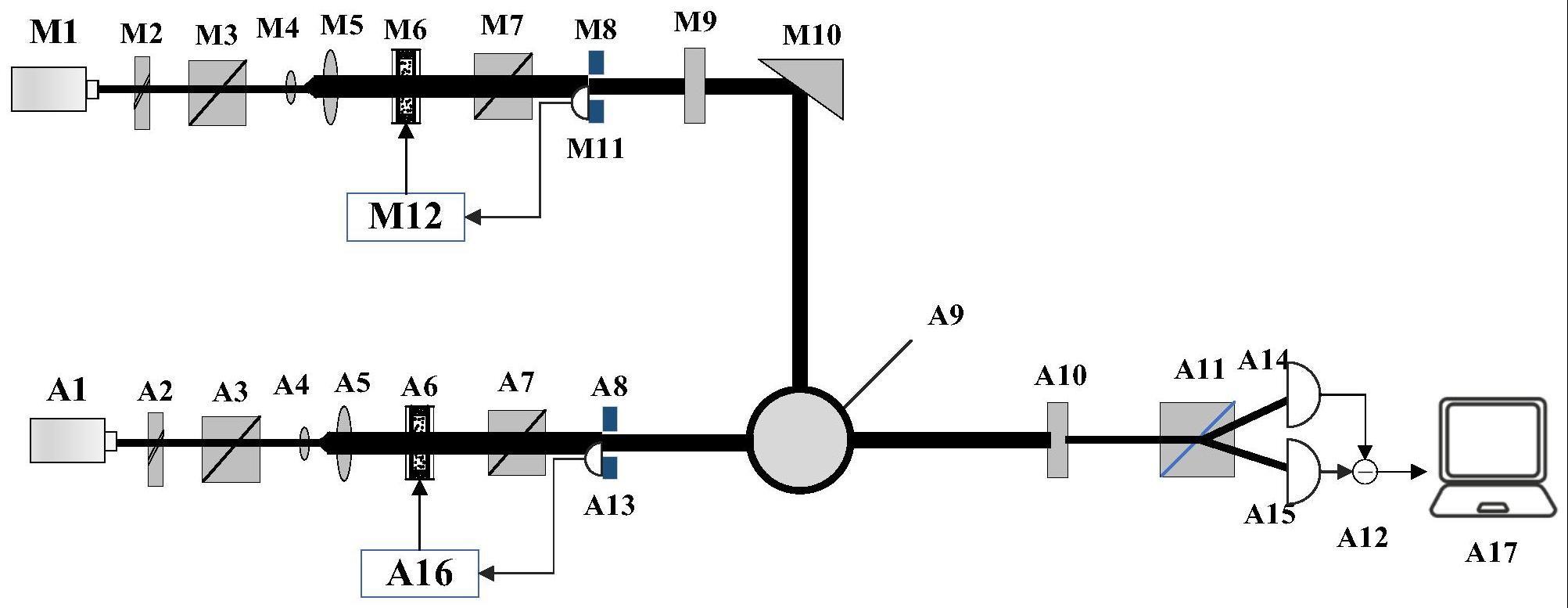
2、根据serf惯性测量装置误差传递关系,检测激光光强的波动会直接引起标度因数误差,抽运激光光强的波动会直接引起抽运率的波动,进而影响极化率的稳定性。为满足serf惯性测量装置高精度测量旋转角速率的要求,必须对serf惯性测量装置抽运激光功率和检测激光功率进行稳定控制。传统serf原子自旋惯性测量系统的激光功率稳定系统,存在着光路过长,有偏振误差等问题,导致了传统激光功率稳定系统表现仍不够理想。例如图2所示(图2是现有技术中的激光功率稳定系统结构示意图),传统的激光功率稳定系统包括在抽运光路上设置的抽运激光器m1,所述抽运激光器m1依次通过第三1/2波片m2、第一偏振分光棱镜m3、第三凸透镜m4、第四凸透镜m5、第二液晶相位延迟器m6、第二偏振分光棱镜m7、第四1/2波片n8、第三偏振分光棱镜n9和第一1/4波片m9连接反射镜m10,所述反射镜m10将抽运光照射到碱金属气室a9中,所述第三偏振分光棱镜n9依次通过第五光电探测器n11和抽运激光功率控制模块m12连接所述第二液晶相位延迟器m6。传统的激光功率稳定系统包括在检测光路上设置的检测激光器a1,所述检测激光器a1依次通过第一1/2波片a2、第一格兰棱镜a3、第一液晶相位延迟器a6、第二格兰棱镜a7、第二1/2波片b8、第四偏振分光棱镜b9、碱金属气室a9和第二1/2波片a10连接沃拉斯顿偏振分光棱镜a11,所述沃拉斯顿偏振分光棱镜a11的反射侧通过第二光电探测器a14连接平衡差分探测器a12的第一输入端,透射侧通过第三光电探测器a15连接所述平衡差分探测器a12的第二输入端,所述平衡差分探测器a12的输出端连接上位机a17,所述第四偏振分光棱镜b9依次通过第一光电探测器b10和检测激光功率控制模块a16连接第一液晶相位延迟器a6。
3、综上,随着原子自旋惯性测量技术的发展和应用的普及,设计新型serf惯性测量装置的全光路功率稳定系统是必要的,而这方面的研究还比较缺乏。本发明的核心为研究了一种基于环形pd的serf惯性装置的全光路功率稳定系统,有效抑制了抽运激光和检测激光功率稳定系统中的偏振误差,减小了光路长度,对系统灵敏度和长期稳定性的提升具有重要意义。
技术实现思路
1、本发明解决的问题是:有效抑制了传统激光功率稳定系统中的偏振误差的问题。提出了基于环形pd的serf惯性装置的全光路功率稳定系统,通过对抽运激光和检测激光进行扩束,利用液晶相位延迟器(liquid crystal variable retarder,lcvr)作为执行器,并在光路中施用光阑和环形光电探测器(photodetector,pd),在简化光路的同时,抑制了传统激光功率稳定系统中的偏振误差,提升了激光功率的稳定性,从而有效提高了serf(spin-exchange relaxation-free,无自旋交换弛豫)原子自旋惯性测量装置输出信号的测量灵敏度和长期稳定性,是一种新型的serf惯性测量装置的全光路功率稳定系统。
2、本发明的技术解决方案如下:
3、基于环形pd的serf惯性装置的全光路功率稳定系统,其特征在于,包括在抽运光路上和检测光路上均设置扩束段,在抽运光扩束段的第二偏振分光棱镜入射侧设置第二液晶相位延迟器,第二偏振分光棱镜透射侧设置抽运光阑与第二环形光电探测器的组合,所述第二环形光电探测器将其环形区域的探测光强反馈到抽运激光功率控制模块,所述第二环形光电探测器将其中间区域作为入射碱金属气室的抽运光通光区域,所述抽运激光功率控制模块通过将所述第二液晶相位延迟器作为执行器实现抽运光路功率稳定,在检测光扩束段的第二格兰棱镜入射侧设置第一液晶相位延迟器,第二格兰棱镜透射侧设置检测光阑与第一环形光电探测器的组合,所述第一环形光电探测器将其环形区域的探测光强反馈到检测激光功率控制模块,所述第一环形光电探测器将其中间区域作为入射碱金属气室的检测光通光区域,所述检测激光功率控制模块通过将所述第一液晶相位延迟器作为执行器实现检测光路功率稳定。
4、所述第二液晶相位延迟器依次通过第四凸透镜、第三凸透镜、第一偏振分光棱镜和第三1/2波片连接抽运激光器,所述抽运光阑依次通过第一1/4波片和反射镜连接碱金属气室,所述第一液晶相位延迟器依次通过第二凸透镜、第一凸透镜、第一格兰棱镜和第一1/2波片连接检测激光器,所述检测光阑依次通过碱金属气室和第二1/2波片连接沃拉斯顿偏振分光棱镜,所述沃拉斯顿偏振分光棱镜的反射侧通过第二光电探测器连接平衡差分探测器的第一输入端,透射侧通过第三光电探测器连接所述平衡差分探测器的第二输入端,所述平衡差分探测器的输出端连接上位机。
5、所述抽运激光功率控制模块利用第二环形光电探测器的探测光强作为采集信号与抽运光强期望信号的差值通过pid算法输出抽运激光功率控制信号。
6、所述检测激光功率控制模块利用第一环形光电探测器的探测光强作为采集信号与检测光强期望信号的差值通过pid算法输出检测激光功率控制信号。
7、所述检测激光功率控制模块采用增量式pid控制算法,以保证控制的时效性,其输出信号只与最近三次的采样误差有关,不受全局采样信号的影响,能够有效地抑制因长时间累计导致的信号误差。
8、所述增量式pid控制算法包括以下表达式:
9、δui=kp(erri-erri-1)+kierri+kd(erri-2erri-1+erri-2)
10、erri=vs-vi
11、其中δui为检测激光强度误差变化增量,kp为比例系数;ki为积分系数;kd为微分系数,erri为检测激光强度设定值或期望值与当前采集值的差值,erri-1为erri的上一次偏差,erri-2为erri-1的上一次偏差,vs为检测信号设定值,vi为检测信号当前值,i是正整数,i指信号采集序号数,i=1,2,3…,n,n是正整数。
12、本发明的技术效果如下:本发明基于环形pd的serf惯性装置的全光路功率稳定系统,相比于传统的激光功率稳定系统,利用光阑作为“分光器件”,并将环形光电探测器置于光阑上,实现激光信号探测,也减小了光路的长度,有利于小型化的集成。
13、由于光阑并不影响激光的偏振,因此不会引入偏振误差,从其最终输出的检测激光琼斯矢量可以看出,本发明所述的基于环形pd的serf惯性装置的全光路功率稳定系统,其输出的抽运激光和检测激光抗扰动能力更强。
14、本发明的基于环形pd的serf惯性装置的全光路功率稳定系统,有效消除了由于1/2波片和偏振分光棱镜导致的偏振误差,提升了抽运激光和检测激光的功率稳定性,有利于提升serf惯性测量装置的长期稳定性。
- 还没有人留言评论。精彩留言会获得点赞!