一种网箱养殖鱼群数量估计方法及装置与流程
:本发明属于声呐探测,具体涉及一种网箱养殖鱼群数量估计方法及装置。
背景技术
0、
背景技术:
1、深水网箱养殖是在深水海域进行海水鱼类养殖的一种新型技术,相比浅海养殖,深海网箱以其抗风浪、耐海流能力强、养殖容量大、高产高效、环保等优势,在全球海洋渔业资源日益衰退的今天,已成为海洋渔业可持续发展的一个高新产业和发展方向,正得以在国内外迅速推广。为了降低鱼群饲养成本,提高养殖经济效益,实现养殖全程鱼群投喂的智能化、精准化和高效化,了解鱼群养殖习性,合理化投饵规模及方式,掌握鱼群数量及密度,预警栖息特性变化显得十分重要。但由于光在养殖水域的传播距离受限,如何估计网箱养殖鱼群数量是一个亟待解决的技术问题。
技术实现思路
0、
技术实现要素:
1、本发明所要解决的技术问题是,提供一种网箱养殖鱼群数量估计方法及装置,该方法通过多波束目标回波能量检测和分布累积实现单位空间的鱼群数量估计。
2、本发明的技术解决方案是,提供一种网箱养殖鱼群数量估计方法,包括以下步骤,
3、首先确定声基阵的布阵形式;
4、其次通过利用正交性分别通过相移和时延波束形成实现三维波束覆盖,降低三维探测硬件成本和计算量;
5、在此基础上通过回波能量检测和中值滤波抑制三维点云数据中的斑点噪声;
6、进一步开展在线目标回波强度测量和基于高斯分布的动态门限设置;
7、最后通过有效回波计数,得到指定空间鱼群数量和鱼群密度估计值。
8、本
技术实现要素:
主要有以下两点:采用了多波束累积技术,公开了一套三维鱼群密度估计装置;以及提供了一种提高养殖网箱鱼群密度估计精度的方法。
9、具体的,
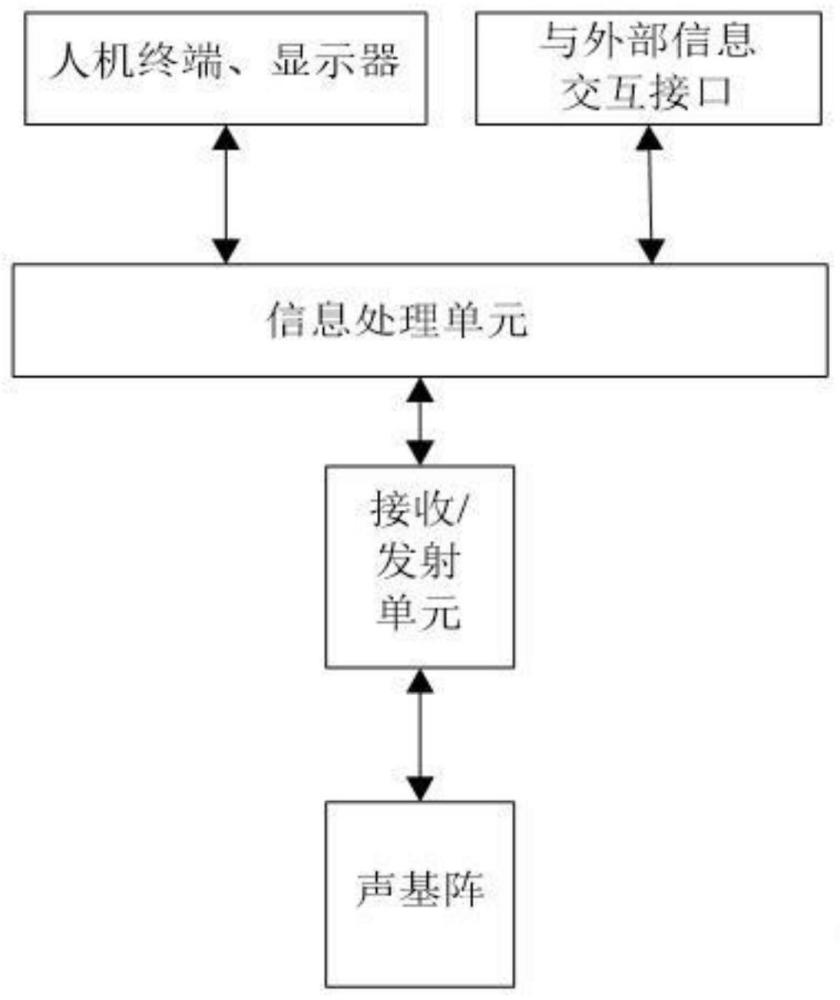
10、(1)鱼群密度估计声纳装置
11、该装置包括声基阵、接收/发射单元、信息处理单元以及人机终端等,其中人机终端具有人机交互界面,而信息处理单元则具有与外部信息交互的接口,用于鱼群密度估计的声纳通过发射声基阵发射声波、接收声基阵接收鱼群散射回波,再通过前置放大接收预处理电路进行信号调理,通过波束形成、信息处理实现回波信号检测与鱼群数量与密度估计。
12、(2)密度估计方法
13、其中声基阵通过相控波束控制形成空间波束覆盖(α0,β0),在空间形成一个如附图2所示的三维区域,为了减少底部混响和水面混响对密度估计的影响,在距离维上选取r1~r2之间的距离以及波束覆盖的范围作为采样空间v。假设采样空间v中鱼的数量为n,则网箱中鱼群密度计算公式如公式:
14、
15、可根据波束宽度、波束数以及r1~r2计算出体积v。
16、采样空间中的鱼群数量n的计算流程如图3所示,该方法对经过对多ping数据累积、滤波、门限处理。对于密度小的养殖网箱鱼群(≤μ条/m3),根据回波累积估计鱼群的数量n,采用回波计数的方式,根据公式(1)计算得出鱼群密度。
17、(3)基阵布阵
18、基阵采用柱面阵,采用收发合置布阵方式,布阵示意图见附图4,建立坐标系,其中x方向由p0个独立阵元组成的圆弧阵,该圆弧对应圆心角即为基阵相对y-z平面的开角α0;圆柱母线y方向由q0个独立阵元组成的直线阵组成,通过波束驾驶覆盖x-z平面的开角β0。阵元间距为d=λ/2。
19、(4)发射波束形成
20、发射波束由p0条与y轴平行的直线阵通过相控实现,参加相控的直线阵元为q0个,不加权发射时其波束宽度为通过生成q0个相控发射信号实现波束俯仰,沿y方向进行相控,对p0条直线阵采用相同的时延(或相控),沿y方向通过一次发射(一个ping),可覆盖空间,通过k次发射覆盖α0×β0空间,实现原理如附图5。其中:
21、
22、第k个波束指向:
23、若k为偶数
24、或若k为奇数。
25、其中1条直线阵元定义为q0个阵元驾驶到βk方向的发射信号输出如下:
26、
27、其中wq为发射信号权系数,可采用hamming权。
28、(5)接收波束形成
29、利用正交性,对单次发射(1个ping)接收波束形成可以分为母线y方向的直线阵相控波束形成和水平方向的圆弧阵波束形成两步实现。为了节省硬件和软件资源,对单个ping,先对平行于y轴由q0个阵元组成的第p条直线阵进行相控波束形成,在y-o-z平面形成1个波束,波束指向βk,与发射波束指向相同;再将此波束的声中心作为离散圆弧阵p0个虚拟阵元,再对p0个虚拟阵元构成的圆弧阵在x方向进行时延波束形成,形成j个波束,覆盖空间,通过k此发射实现j×k个发射与接收波束,覆盖α0×β0空间,直线阵接收波束原理如附图6。其中:
30、
31、第j个波束指向
32、若j为偶数
33、或若j为奇数。
34、a)直线阵接收波束形成
35、q0-1个阵元βk方向的波束形成如图6。
36、在βk方向,直线阵的时域波束形成输出:
37、
38、b)圆弧阵接收波束形成
39、首先建立离散圆阵坐标系,如附图7,参考点选圆心o。设园半径为r0,把虚拟阵元按顺时针方向编号为设p0为偶数,把圆心o通过阵中心0°方向,相邻两个基元的夹角为
40、把第p个虚拟阵元p=0,1,...,p0-1接收到的信号bp(t,βk)写成sp(t,βk),即:
41、
42、设信号来自α方向,首先将p个基元hp所接收信号同步到α方向,各个阵元所需时延为:
43、其中p=1,2,...,p0-1,c为水中声速。
44、得:sp(t+τp)=bp(t+τp(α),βk),
45、其次为了在αj方向形成波束,需将hp阵元信号加以时延
46、
47、得到:sp(t)=sp(t+τp(α)-τp(αj),βk)
48、p0个虚拟阵元分别经延时求和,得到一个指向(αj,βk)波束:
49、
50、对b(t,αj,βk)波束输出进行离散化表述,重写为:xj,k(n),n=tfs2,采样率为fs2,信号脉宽为t。
51、(6)目标回波能量检测
52、其中n=int(tfs2)
53、(7)滤波
54、采用中值滤波去除水中气泡等斑点噪声干扰。假定输入信号为x1(n),设定窗口长度为2m+1,m由鱼体尺寸与工作信号脉宽t综合确定。对于每一个x1(n),选取:
55、x1(n-m),...,x1(n-1),x1(n),x1(n+1),...,x1(n+m),
56、得到中间的那个数就为中位数滤波输出:
57、x2(n)=中位数{x1(n-m),...,x1(n+m)}
58、(8)目标回波强度测量
59、单次反射目标强度tsi通过计算后向散射强度i得到,其中:
60、tsi=10log(ii)-sl+40log(ri)+2ηri+nfi+ψi
61、其中:ii=a·x2i(n),a为修正因子,与系统灵敏度及放大倍数有关;
62、sl为入射声源级;
63、η为海水吸收系数,单位为db/m;
64、40log(ri)为距离修正因子;
65、nfi为近场修正因子,由实验室进行校正;
66、ψi为波束间修正因子,由实验室进行校正;
67、设距离r1~r2间的距离维量化单元为seg,求得体积单元内j×k×seg个单次散射回波强度的tsl(l=1~jk·seg),且不考虑散射回波的相干性,则按高斯分布估计回波强度的均值和方差,通过最大拟然估值,得到期望值tssh和方差
68、(9)门限设置
69、选目标强度满足tssh-3σsh≤tsl≤tssh+3σsh的回波样本,对图2所示距离为r1~r2、空间波束覆盖为α0~β0范围保留样本进行计数,得到总样本数ζ,也即鱼群数量。
70、(10)密度估计
71、根据图2,计算r1和r2之间空间体体积v;
72、鱼群密度:
73、与现有技术相比,本发明具有以下优点:
74、本发明利用声学探测手段,即通过高频主动多波束声纳,通过合理布放传感器位置,实现一定立体角范围鱼群密度、体积分布、运动状态估计监测,通过能量积分、统计分析实现养殖鱼群数量估计,实现对不同水域、全天候、无人值守、安全可靠的鱼群状态监测与生物量估计。
- 还没有人留言评论。精彩留言会获得点赞!