基于高精度激光引导的微米级尘埃粒子检测方法与流程
本发明涉及颗粒检测,特别涉及一种基于高精度激光引导的微米级尘埃粒子检测方法。
背景技术:
1、传统的微米级尘埃粒子检测方法之一为光散射法,光散射法利用空气流动配合激光和光电接收器进行尘埃粒子检测,一般采用手持式尘埃粒子检测装置或设置在固定位置的尘埃粒子检测装置检测。
2、但是,现有技术中的微米级尘埃粒子检测方法采用手持式尘埃粒子检测装置由于用户手持移动轨迹的不定性以及设置在固定位置的尘埃粒子检测装置的检测范围的有限性,导致对封闭空间内的尘埃粒子检测结果误差较大。
3、因此,本发明提出了一种基于高精度激光引导的微米级尘埃粒子检测方法。
技术实现思路
1、本发明提供一种基于高精度激光引导的微米级尘埃粒子检测方法,用以基于不同的封闭空间的构造生成对应的高精度激光引导轨迹,基于该高精度激光引导轨迹控制微米级激光尘埃粒子计数器在待检封闭空间内进行移动,并记录在高精度激光引导轨迹移动过程中每个位置获取的微米级尘埃粒子分布情况,不仅扩大了检测范围,而且生成的高精度激光引导轨迹相较于传统的用户手持移动轨迹更为合理,大大避免了对封闭空间内局部空间的重复检测和漏测,进而保证了封闭空间内尘埃粒子检测结果的准确性;且通过对尘埃粒子的移动轨迹的分析,摒除封闭空间内由于尘埃粒子移动引起的检测结果的误差。
2、本发明提供的基于高精度激光引导的微米级尘埃粒子检测方法,包括:
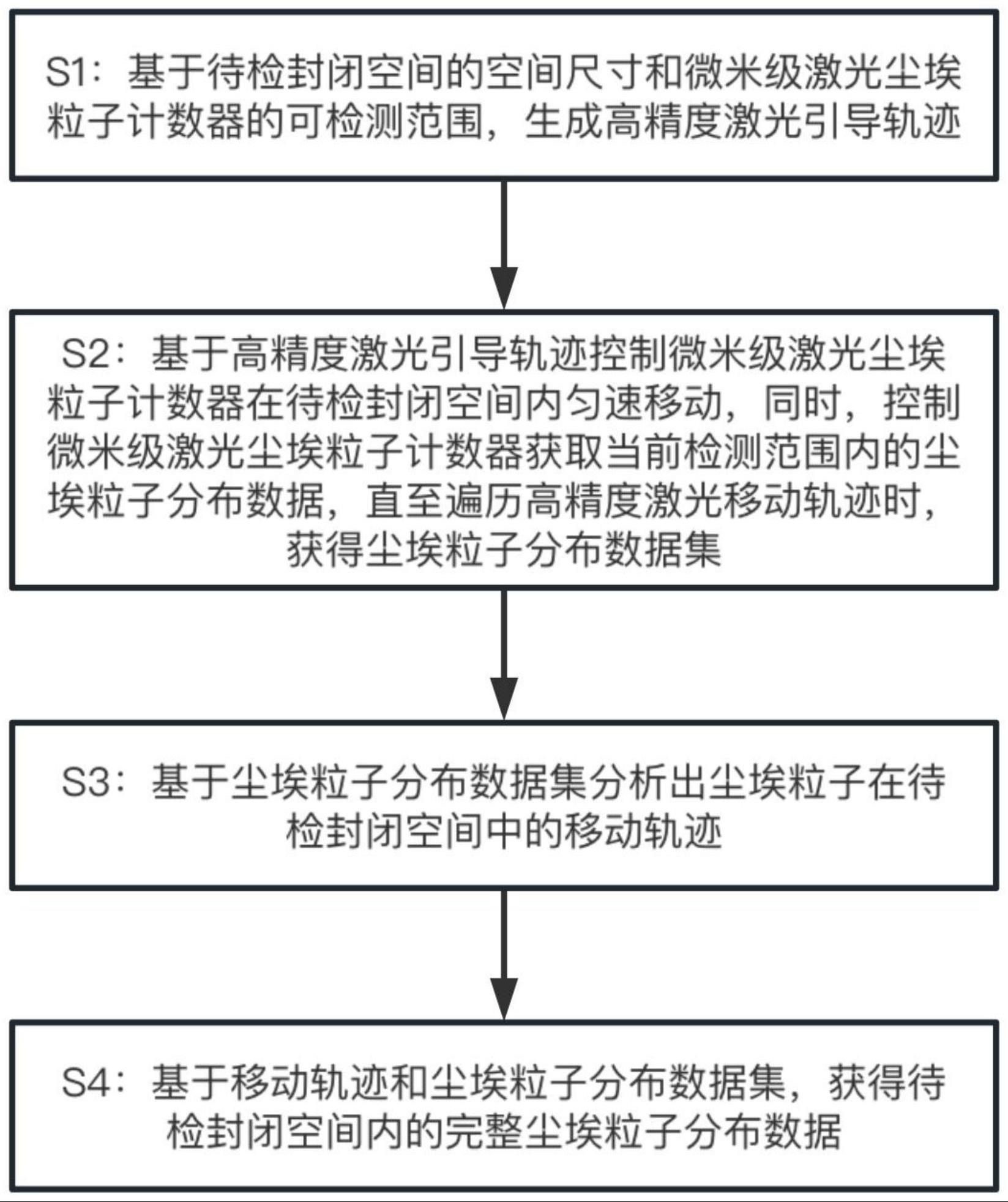
3、s1:基于待检封闭空间的空间尺寸和微米级激光尘埃粒子计数器的可检测范围,生成高精度激光引导轨迹;
4、s2:基于高精度激光引导轨迹控制微米级激光尘埃粒子计数器在待检封闭空间内匀速移动,同时,控制微米级激光尘埃粒子计数器获取当前检测范围内的尘埃粒子分布数据,直至遍历高精度激光移动轨迹时,获得尘埃粒子分布数据集;
5、s3:基于尘埃粒子分布数据集分析出尘埃粒子在待检封闭空间中的移动轨迹;
6、s4:基于移动轨迹和尘埃粒子分布数据集,获得待检封闭空间内的完整尘埃粒子分布数据;
7、其中,尘埃粒子分布数据为对应范围内的空间内的所有尘埃粒子的粒径。
8、优选的,s1:基于待检封闭空间的空间尺寸和微米级激光尘埃粒子计数器的激光照射参数,生成高精度激光引导轨迹,包括:
9、s101:确定出微米级激光尘埃粒子计数器的可检测范围的立体尺寸区块;
10、s102:基于待检封闭空间的空间尺寸确定出待检封闭空间的拐角点和封闭面,基于拐角点和封闭平面以及立体尺寸区块生成多条初始引导轨迹;
11、s103:基于立体尺寸区块计算出每条初始引导轨迹的区块重叠率和方向改变程度;
12、s104:基于每条初始引导轨迹的区块重叠率和方向改变程度,在所有初始引导轨迹中筛选出高精度激光引导轨迹。
13、优选的,s102:基于待检封闭空间的空间尺寸确定出待检封闭空间的拐角点和封闭面,基于拐角点和封闭平面生成多条初始引导轨迹,包括:
14、基于待检封闭空间的空间尺寸确定出待检封闭空间的拐角点和封闭面,确定出封闭面之间的交线;
15、确定出多个由多个交线组成的初始封闭轨迹;
16、基于每个初始封闭轨迹和立体尺寸区块判断出待检封闭空间中是否存在单个初始封闭轨迹的未覆盖空间区块,若是,则基于未覆盖区块中包含的拐角点和初始封闭轨迹,生成包含当前的初始封闭轨迹中的至少一个拐角点的新的封闭轨迹,直至基于当前确定出的拐角点存在交叉的封闭轨迹或初始封闭轨迹以及立体尺寸区块,判断出待检封闭空间中不存在未覆盖空间区块时,则将当前的初始封闭轨迹和依次确定出的封闭轨迹进行连接,获得当前的初始封闭轨迹对应的初始引导轨迹;
17、否则,将初始封闭轨迹当作初始引导轨迹。
18、优选的,s103:基于立体尺寸区块计算出每条初始引导轨迹的区块重叠率和方向改变程度,包括:
19、将初始引导轨迹中包含的位置点总数与立体尺寸区块的体积的乘积,当作初始引导轨迹的总检测区块体积;
20、将总检测区块体积与待检封闭空间的总容积的差值,当作初始引导轨迹的重叠空间体积;
21、将重叠空间体积与待检封闭空间的总容积的比值当作初始引导轨迹的区块重叠率;
22、基于初始引导轨迹的全程延伸方向计算出初始引导轨迹的方向改变程度。
23、优选的,基于初始引导轨迹的全程延伸方向计算出初始引导轨迹的方向改变程度,包括:
24、基于初始引导轨迹的全程延伸方向确定出初始引导轨迹中包含的曲线段,确定出曲线段中每个位置点的切线,将曲线段中相邻位置点的切线之间的角度差与360度的比值当作相邻位置点的第一局部方向改变程度;
25、确定出初始引导轨迹中的所有拐点;
26、当初始引导轨迹中的拐点两端连接的都是曲线段时,则将拐点两端连接的两个曲线段分别在当前的拐点处的切线之间的角度差与360度的比值,当作当前的拐点的第二局部方向改变程度;
27、当初始引导轨迹中的拐点两端连接的都是直线段时,则将拐点两端连接的两个直线段之间的角度差与360度的比值,当作当前拐点的第二局部方向改变程度;
28、当初始引导轨迹中的拐点两端分别连接有曲线段和直线段时,则将拐点一端连接的直线段与另一端连接的曲线段在当前的拐点处的切线之间的角度差与360度的比值,当作当前的拐点的第二局部方向改变程度;
29、将曲线段中的所有第一局部方向改变程度和初始引导轨迹中所有拐点的第二局部方向改变程度之和,当作初始引导轨迹的方向改变程度。
30、优选的,s104:基于每条初始引导轨迹的区块重叠率和方向改变程度,在所有初始引导轨迹中筛选出高精度激光引导轨迹,包括:
31、将区块重叠率和方向改变程度分别进行归一化,获得每个初始引导轨迹的两个归一化特征值;
32、将初始引导轨迹的两个归一化特征值之和,当作初始引导轨迹的劣度;
33、基于最小劣度的初始引导轨迹的区块重叠率,确定出合理移动速度;
34、基于最小劣度的初始引导轨迹和合理移动速度,确定出高精度激光引导轨迹。
35、优选的,s3:基于尘埃粒子分布数据集分析出尘埃粒子在待检封闭空间中的移动轨迹,包括:
36、s301:在尘埃粒子分布数据集筛选出不同检测范围之间粒径相同的尘埃粒子,当作疑似重复尘埃粒子;
37、s302:基于不同检测范围之间粒径相同的尘埃粒子,拟合出疑似移动轨迹;
38、s303:在所有疑似移动轨迹和疑似重复尘埃粒子,筛选出尘埃粒子在待检封闭空间中的移动轨迹。
39、优选的,s303:在所有疑似移动轨迹和疑似重复尘埃粒子,筛选出尘埃粒子在待检封闭空间中的移动轨迹,包括:
40、计算出每个疑似移动轨迹在所有疑似移动轨迹中的所属度;
41、将所属度不小于所属度阈值的疑似移动轨迹当作尘埃粒子在待检封闭空间中的移动轨迹。
42、优选的,计算出每个疑似移动轨迹在所有疑似移动轨迹中的所属度,包括:
43、基于疑似移动轨迹的延伸方向,将疑似移动轨迹在相邻疑似重复尘埃粒子处的切线的角度差进行排序,获得角度差序列;
44、确定出不同疑似移动轨迹的角度差序列中相同序数的角度差的差值与均值之比,当作局部偏差度;
45、将两个疑似移动轨迹的所有局部偏差度的均值当作第一偏差度,并将两个疑似移动轨迹的疑似重复尘埃粒子的总数差与总数均值之比,当作第二偏差度;
46、将第一偏差度和第二偏差度之和当作两个疑似移动轨迹的总偏差度,将1与总偏差度的差值当作两个疑似移动轨迹的相似度;
47、将疑似移动轨迹与所有疑似移动轨迹中除当前疑似移动轨迹以外剩余的每个疑似移动轨迹之间的相似度的均值,当作当前计算的疑似移动轨迹的所属度。
48、优选的,s4:基于移动轨迹和尘埃粒子分布数据集,获得待检封闭空间内的完整尘埃粒子分布数据,包括:
49、基于移动轨迹对应的所有疑似重复尘埃粒子,对尘埃粒子分布数据集进行初次去重,获得待检封闭空间内的尘埃粒子分布数据。
50、本发明区别于现有技术的有益效果为:基于不同的封闭空间的构造生成对应的高精度激光引导轨迹,基于该高精度激光引导轨迹控制微米级激光尘埃粒子计数器在待检封闭空间内进行移动,并记录在高精度激光引导轨迹移动过程中每个位置获取的微米级尘埃粒子分布情况,不仅扩大了检测范围,而且生成的高精度激光引导轨迹相较于传统的用户手持移动轨迹更为合理,大大避免了对封闭空间内局部空间的重复检测和漏测,进而保证了封闭空间内尘埃粒子检测结果的准确性;且通过对尘埃粒子的移动轨迹的分析,摒除封闭空间内由于尘埃粒子移动引起的检测结果的误差。
51、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
52、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!