一种对于售后车辆毫米波角雷达的标定方法与流程
本发明属于汽车毫米波雷达领域,具体属于一种对于售后车辆毫米波角雷达的标定方法。
背景技术:
1、毫米波雷达可以全天候监测车辆侧后方区域目标,并实时获取车辆目标的位置、速度等信息。一旦监测到周围车辆可能对本车驾驶形成碰撞风险,会通过声光等报警信号提醒驾驶员,以保证驾驶安全,
2、其中,目标角度的测量是对确定目标相对于主车辆的车道位置、计算纵向车速进而计算碰撞时间等具有决定性的影响因素,对于报警结果产生直接影响,其监测的准确性尤为重要。车辆售出后可能会存在毫米波雷达受到外部的影响导致雷达角度发生细微偏移,或者需要更换新的雷达,对此需要启动售后标定来写入标准范围内的角度值来校正雷达,确保雷达探测的准确度。
3、然而现有技术中的雷达标定方法存在流程复杂,需要占用专业的场地,车辆售后人员搭建标定设备,成本较高。
技术实现思路
1、为了解决现有技术中存在的问题,本发明提供一种对于售后车辆毫米波角雷达的标定方法,用于解决现有技术中的雷达标定方法存在流程复杂,需要占用专业的场地,成本较高的问题,本发明能进行售后标定来写入标准范围内的角度值来校正雷达,确保雷达探测的准确度。
2、为实现上述目的,本发明提供如下技术方案:
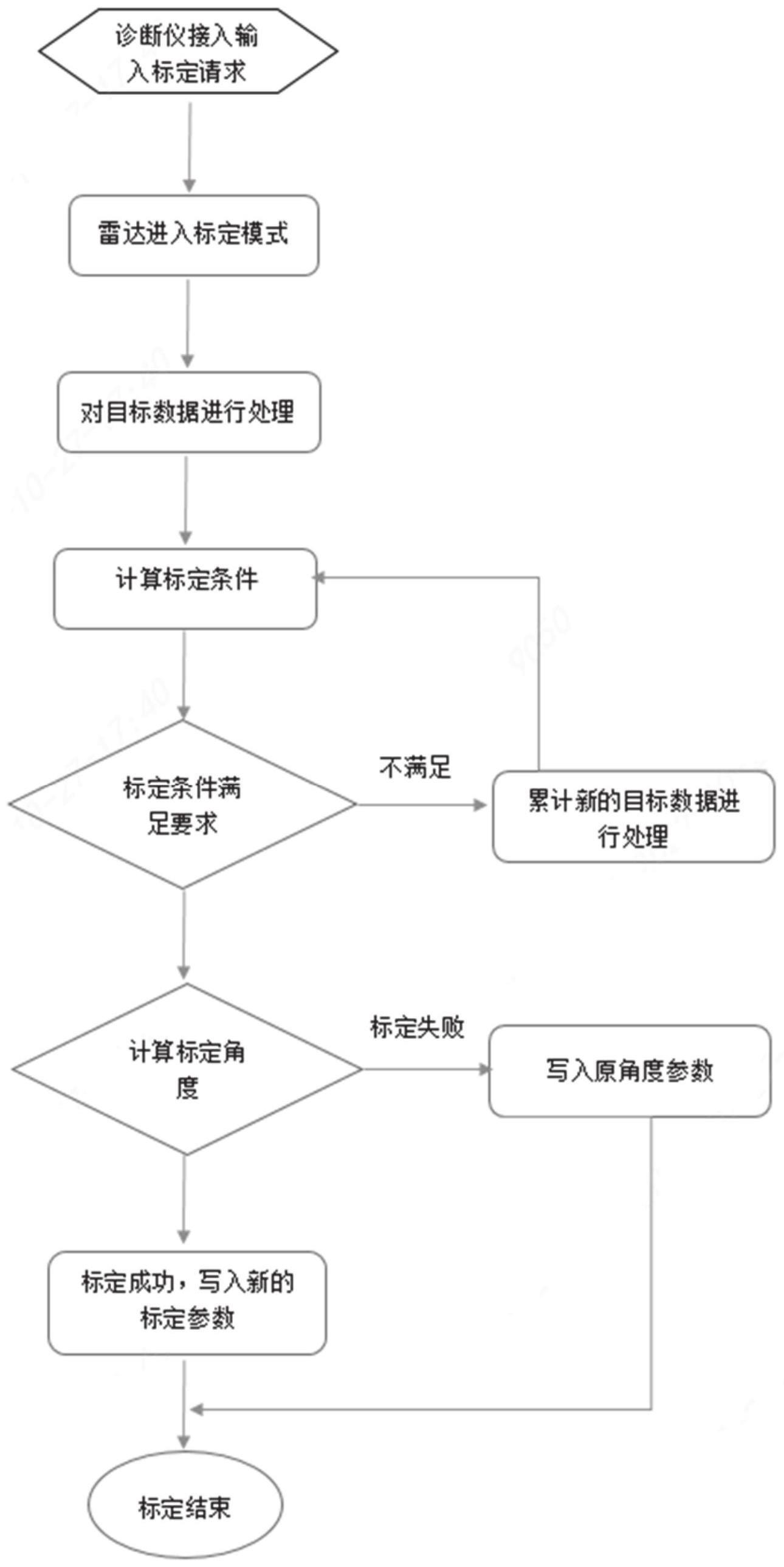
3、一种对于售后车辆毫米波角雷达的标定方法,包括以下过程,
4、将售后车辆毫米波角雷达进入标定模式;
5、售后车辆行驶在售后标定路面,行驶过程中对目标数据进行采集并处理;
6、依据目标数据计算标定条件;
7、当标定条件满足要求时,计算标定角度;当标定角度标定成功时,写入新的标定参数,完成毫米波角雷达的标定。
8、优选的,售后标定路面为路面平直,且道路长度不小于60米的路面。
9、优选的,售后标定路面为两侧有金属护栏或绿化带的路面。
10、优选的,所述目标数据为售后车辆相对于售后标定路面上静止目标的相对运动信息;
11、当售后车辆毫米波角雷达采集到的相对运动信息满足标定条件时,计算售后车辆相对于售后标定路面上静止目标的位置与真实位置的差值做为标定角度。
12、优选的,所述标定条件为目标点的点迹连续且规律稳定。
13、优选的,所述目标数据的目标点为售后车辆在行驶过程距离范围为100m至110m的静止目标。
14、优选的,所述售后车辆在毫米波角雷达标定时的车速范围为20-80km/h。
15、优选的,售后车辆行驶过程中横摆角速度维持在10度以内。
16、与现有技术相比,本发明具有以下有益的技术效果:
17、本发明提供一种对于售后车辆毫米波角雷达的标定方法,通过车辆行驶到合适的路况时,根据雷达采集到的目标数据,根据目标的距离,速度,角度等特征,选取一定距离范围内的静止目标进行计算,并判断标定过程计算稳定程度,雷达扫描时会对点迹进行判断:点迹的连续性、整齐规律、是否达到可标定值;点迹的点迹数量、连续性、规律性影响稳定程度。满足上述的动态标定条件,就将开始雷达安装角度校正过程。本发明中售后标定无需车辆售后人员搭建标定设备,只需要售后相关人员把需要进行标定的车辆开到有隔离护栏、绿化带的道路上保持一定速度沿着护栏等左右跑一段路,根据诊断仪提示进行标定即可,可以减少售后设备成本及占用场地,售后标定方便快捷。
技术特征:
1.一种对于售后车辆毫米波角雷达的标定方法,其特征在于,包括以下过程,
2.根据权利要求1所述的一种对于售后车辆毫米波角雷达的标定方法,其特征在于,售后标定路面为路面平直,且道路长度不小于60米的路面。
3.根据权利要求1所述的一种对于售后车辆毫米波角雷达的标定方法,其特征在于,售后标定路面为两侧有金属护栏或绿化带的路面。
4.根据权利要求1所述的一种对于售后车辆毫米波角雷达的标定方法,其特征在于,所述目标数据为售后车辆相对于售后标定路面上静止目标的相对运动信息;
5.根据权利要求1所述的一种对于售后车辆毫米波角雷达的标定方法,其特征在于,所述标定条件为目标点的点迹连续且规律稳定。
6.根据权利要求1所述的一种对于售后车辆毫米波角雷达的标定方法,其特征在于,所述目标数据的目标点为售后车辆在行驶过程距离范围为100m至110m的静止目标。
7.根据权利要求1所述的一种对于售后车辆毫米波角雷达的标定方法,其特征在于,所述售后车辆在毫米波角雷达标定时的车速范围为20-80km/h。
8.根据权利要求1所述的一种对于售后车辆毫米波角雷达的标定方法,其特征在于,售后车辆行驶过程中横摆角速度维持在10度以内。
技术总结
本发明公开了一种对于售后车辆毫米波角雷达的标定方法,包括以下过程,将售后车辆毫米波角雷达进入标定模式;售后车辆行驶在售后标定路面,行驶过程中对目标数据进行采集并处理;依据目标数据计算标定条件;当标定条件满足要求时,计算标定角度;当标定角度标定成功时,写入新的标定参数,完成毫米波角雷达的标定。用于解决现有技术中的雷达标定方法存在流程复杂,需要占用专业的场地,成本较高的问题,本发明能进行售后标定来写入标准范围内的角度值来校正雷达,确保雷达探测的准确度。
技术研发人员:汪义强,宋玉中,孙羽,王红余
受保护的技术使用者:奇瑞新能源汽车股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!