农机空间运行轨迹状态判定方法、装置及电子设备
本发明涉及计算机,尤其涉及一种农机空间运行轨迹状态判定方法、装置及电子设备。
背景技术:
1、随着农机信息化发展,以及“互联网+农机”的推动,现在农机上普遍安装有基于全球导航卫星系统(global navigation satellite system,gnss)的定位终端,采集农机作业gnss位置、方向角和gnss速度等信息,利用数据挖掘方法进行农机作业面积统计成为可能,而农机空间运行轨迹状态是农机作业面积计量的基础,农机典型状态包括停歇、转运和田间作业等三种状态。如何准确地判定农机空间运行轨迹状态是目前业绩亟待解决的技术问题。
技术实现思路
1、针对现有技术存在的问题,本发明实施例提供一种农机空间运行轨迹状态判定方法、装置及电子设备。
2、第一方面,本发明提供一种农机空间运行轨迹状态判定方法,包括:
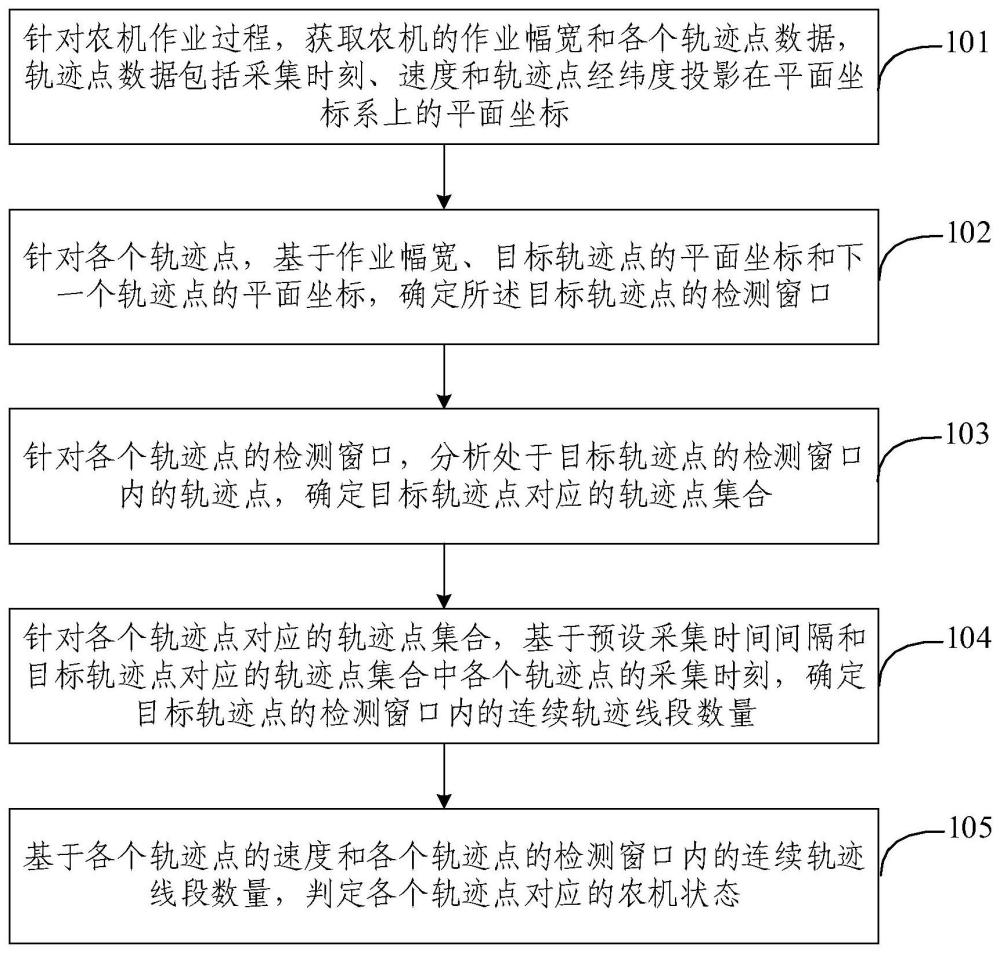
3、针对农机作业过程,获取农机的作业幅宽和各个轨迹点数据,轨迹点数据包括采集时刻、速度和轨迹点经纬度投影在平面坐标系上的平面坐标,所述轨迹点是通过农机上的卫星定位模块,基于预设采集时间间隔,周期性地对农机进行监测所采集到的;
4、针对各个轨迹点,基于作业幅宽、目标轨迹点的平面坐标和下一个轨迹点的平面坐标,确定所述目标轨迹点的检测窗口,所述检测窗口的形状为正方形,所述检测窗口的中心是基于所述目标轨迹点的平面坐标确定的,所述检测窗口的方向为从所述目标轨迹点指向下一个轨迹点,所述检测窗口的尺寸能够覆盖至少4个作业幅宽,目标轨迹点为多个轨迹点中的任意一项,下一个轨迹点的采集时刻处于所述目标轨迹点的采集时刻之后且下一个轨迹点的采集时刻与所述目标轨迹点的采集时刻之间相差一个所述预设采集时间间隔;
5、针对各个轨迹点的检测窗口,分析处于目标轨迹点的检测窗口内的轨迹点,确定目标轨迹点对应的轨迹点集合;
6、针对各个轨迹点对应的轨迹点集合,基于预设采集时间间隔和目标轨迹点对应的轨迹点集合中各个轨迹点的采集时刻,确定目标轨迹点的检测窗口内的连续轨迹线段数量;
7、基于各个轨迹点的速度和各个轨迹点的检测窗口内的连续轨迹线段数量,判定各个轨迹点对应的农机状态,农机状态为停歇状态、转运状态或田间作业状态。
8、可选地,根据本发明提供的一种农机空间运行轨迹状态判定方法,所述基于作业幅宽、目标轨迹点的平面坐标和下一个轨迹点的平面坐标,确定所述目标轨迹点的检测窗口,包括:
9、基于所述目标轨迹点的平面坐标和所述下一个轨迹点的平面坐标,确定窗口方向,所述窗口方向用于表征目标直线与所述平面坐标系中x轴之间的夹角,所述目标直线是基于所述目标轨迹点的平面坐标和所述下一个轨迹点的平面坐标确定的;
10、基于所述作业幅宽和所述卫星定位模块的定位精度,确定窗口尺寸;
11、基于所述窗口方向、所述窗口尺寸和所述目标轨迹点的平面坐标,确定四个窗口角点分别对应的平面坐标;
12、基于所述四个窗口角点分别对应的平面坐标,确定所述目标轨迹点的检测窗口。
13、可选地,根据本发明提供的一种农机空间运行轨迹状态判定方法,所述基于所述目标轨迹点的平面坐标和所述下一个轨迹点的平面坐标,确定窗口方向,包括:
14、通过以下窗口方向计算公式,确定所述窗口方向;
15、
16、其中,θ表示所述目标直线与所述平面坐标系中x轴之间的夹角,pi.x表示所述目标轨迹点在所述平面坐标中x轴上的坐标,pi.y表示所述目标轨迹点在所述平面坐标中y轴上的坐标,pi+1.x表示所述下一个轨迹点在所述平面坐标中x轴上的坐标,pi+1.y表示所述下一个轨迹点在所述平面坐标中y轴上的坐标。
17、可选地,根据本发明提供的一种农机空间运行轨迹状态判定方法,所述基于所述作业幅宽和所述卫星定位模块的定位精度,确定窗口尺寸,包括:
18、通过以下窗口尺寸计算公式,确定所述窗口尺寸;
19、w=2×(2+e)×j;
20、其中,w表示窗口宽度,e表示所述卫星定位模块的定位精度,j表示所述作业幅宽。
21、可选地,根据本发明提供的一种农机空间运行轨迹状态判定方法,所述四个窗口角点包括第一窗口角点、第二窗口角点、第三窗口角点和第四窗口角点,所述基于所述窗口方向、所述窗口尺寸和所述目标轨迹点的平面坐标,确定四个窗口角点分别对应的平面坐标,包括:
22、通过以下第一窗口角点坐标计算公式,确定所述第一窗口角点的平面坐标;
23、
24、通过以下第二窗口角点坐标计算公式,确定所述第二窗口角点的平面坐标;
25、
26、通过以下第三窗口角点坐标计算公式,确定所述第三窗口角点的平面坐标;
27、
28、通过以下第四窗口角点坐标计算公式,确定所述第四窗口角点的平面坐标;
29、
30、其中,a(x,y)表示第一窗口角点的平面坐标,b(x,y)表示第二窗口角点的平面坐标,c(x,y)表示第三窗口角点的平面坐标,d(x,y)表示第四窗口角点的平面坐标,θ表示所述目标直线与所述平面坐标系中x轴之间的夹角,w表示窗口宽度,pi.x表示所述目标轨迹点在所述平面坐标中x轴上的坐标,pi.y表示所述目标轨迹点在所述平面坐标中y轴上的坐标。
31、可选地,根据本发明提供的一种农机空间运行轨迹状态判定方法,分析处于目标轨迹点的检测窗口内的轨迹点,确定目标轨迹点对应的轨迹点集合,包括:
32、通过以下第一轨迹点筛选公式,对数据集p中的轨迹点进行筛选,确定数据集q;
33、q={p|p(xmin≤x≤xmax&&ymin≤y≤ymax)};
34、通过以下第二轨迹点筛选公式,对数据集q中的轨迹点进行筛选,确定所述目标轨迹点对应的轨迹点集合;
35、
36、其中,p表示由全部的轨迹点所构成的数据集,x和y表示数据集p中任意一个轨迹点在x轴上的坐标以及在y轴上的坐标,xmin表示检测窗口的四个窗口角点分别对应的x轴坐标中的最小值,xmax表示检测窗口的四个窗口角点分别对应的x轴坐标中的最大值,ymin表示检测窗口的四个窗口角点分别对应的y轴坐标中的最小值,ymax表示检测窗口的四个窗口角点分别对应的y轴坐标中的最大值,&&表示逻辑与运算符;
37、若h为真则表示点g在检测窗口内,否则点g在检测窗口外;
38、点a、点b、点c和点d表示检测窗口的四个窗口角点,点g为数据集q中的任意一个轨迹点。
39、可选地,根据本发明提供的一种农机空间运行轨迹状态判定方法,所述基于预设采集时间间隔和目标轨迹点对应的轨迹点集合中各个轨迹点的采集时刻,确定目标轨迹点的检测窗口内的连续轨迹线段数量,包括:
40、通过以下连续轨迹点判断公式,对轨迹点集合中各个轨迹点划分线段,确定目标轨迹点的检测窗口内的连续轨迹线段数量;
41、f′=pi′+1.t-pi′.t;
42、其中,按照采集时刻排序,pi′和pi′+1为轨迹点集合中任意相邻的两个点,pi′+1的采集时刻pi′+1.t处于pi′的采集时刻pi′.t之后;若f′=f则表示pi′和pi′+1为连续轨迹点,pi′和pi′+1属于同一连续轨迹线段,否则pi′和pi′+1为不连续轨迹点,pi′和pi′+1属于不同的连续轨迹线段,f表示所述预设采集时间间隔。
43、可选地,根据本发明提供的一种农机空间运行轨迹状态判定方法,所述基于各个轨迹点的速度和各个轨迹点的检测窗口内的连续轨迹线段数量,判定各个轨迹点对应的农机状态,包括:
44、若轨迹点的速度为0,则判定轨迹点对应的农机状态为停歇状态;
45、或,若轨迹点的速度大于0且轨迹点的检测窗口内的连续轨迹线段数量小于3,则判定轨迹点对应的农机状态为转运状态;
46、或,若轨迹点的速度大于0且轨迹点的检测窗口内的连续轨迹线段数量大于或等于3,则判定轨迹点对应的农机状态为田间作业状态。
47、第二方面,本发明还提供一种农机空间运行轨迹状态判定装置,包括:
48、轨迹监测模块,用于针对农机作业过程,获取农机的作业幅宽和各个轨迹点数据,轨迹点数据包括采集时刻、速度和轨迹点经纬度投影在平面坐标系上的平面坐标,所述轨迹点是通过农机上的卫星定位模块,基于预设采集时间间隔,周期性地对农机进行监测所采集到的;
49、检测窗口确定模块,用于针对各个轨迹点,基于作业幅宽、目标轨迹点的平面坐标和下一个轨迹点的平面坐标,确定所述目标轨迹点的检测窗口,所述检测窗口的形状为正方形,所述检测窗口的中心是基于所述目标轨迹点的平面坐标确定的,所述检测窗口的方向为从所述目标轨迹点指向下一个轨迹点,所述检测窗口的尺寸能够覆盖至少4个作业幅宽,目标轨迹点为多个轨迹点中的任意一项,下一个轨迹点的采集时刻处于所述目标轨迹点的采集时刻之后且下一个轨迹点的采集时刻与所述目标轨迹点的采集时刻之间相差一个所述预设采集时间间隔;
50、轨迹点集合确定模块,用于针对各个轨迹点的检测窗口,分析处于目标轨迹点的检测窗口内的轨迹点,确定目标轨迹点对应的轨迹点集合;
51、连续轨迹线段确定模块,用于针对各个轨迹点对应的轨迹点集合,基于预设采集时间间隔和目标轨迹点对应的轨迹点集合中各个轨迹点的采集时刻,确定目标轨迹点的检测窗口内的连续轨迹线段数量;
52、轨迹点状态判定模块,用于基于各个轨迹点的速度和各个轨迹点的检测窗口内的连续轨迹线段数量,判定各个轨迹点对应的农机状态,农机状态为停歇状态、转运状态或田间作业状态。
53、第三方面,本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述农机空间运行轨迹状态判定方法。
54、本发明提供的农机空间运行轨迹状态判定方法、装置及电子设备,通过获取农机的作业幅宽和各个轨迹点数据以及确定各个轨迹点的检测窗口内的连续轨迹线段数量,可以基于轨迹点的速度,判定轨迹点对应的农机状态是停歇状态或非停歇状态,进而在轨迹点对应的农机状态是非停歇状态的情况下,考虑到转运状态下轨迹点的检测窗口内的连续轨迹线段数量总是少于田间作业状态下轨迹点的检测窗口内的连续轨迹线段数量,可以设定数量阈值并分析轨迹点的检测窗口内的连续轨迹线段数量与该数量阈值的大小关系,以判定轨迹点对应的农机状态是转运状态或田间作业状态,实现高效且准确地判定农机空间运行轨迹状态。
- 还没有人留言评论。精彩留言会获得点赞!