周期性摩擦力矩的测量方法、装置和计算机设备
本申请涉及谐波减速器。具体地,本申请涉及一种周期性摩擦力矩的测量方法、装置、计算机设备和存储介质。
背景技术:
1、谐波减速器具有相对质量轻、结构紧凑、价格低廉等多个优点,因此被广泛应用于以机械臂关节为代表的高精度传动领域。谐波减速器主要由波发生器、柔轮和刚轮三部分组成。通常情况下,刚轮是固定的,波发生器作为输入端,柔轮作为输出端。波发生器在受到驱动力的作用下开始转动,迫使柔轮发生连续的弹性变形,从而引发柔轮与刚轮之间的相对运动,实现传动效果。
2、在谐波减速器传动过程中,需要克服的摩擦力矩包括三个方面,分别是接触摩擦力矩、粘滞摩擦力矩和周期性摩擦力矩。接触摩擦力矩和粘滞摩擦力矩是由波发生器轴承、柔轮和刚轮轮齿之间的相对运动所引起的。另外,由于谐波减速器在加工制造和装配过程中存在误差,波发生器、柔轮和刚轮运动也会出现不均匀,从而产生周期性摩擦力矩。在实际应用中,谐波减速器的周期性摩擦力矩会随着波发生器、刚柔轮相对位置变化而波动,这会导致谐波减速器的传动转速突变以及产生谐振。
3、为了提高传动性能,需要对谐波减速器的周期性摩擦力矩进行测量,并采取相应的补偿措施。然而,目前已有的技术方案主要测量谐波减速器的接触摩擦力矩和粘滞摩擦力矩,对于周期性摩擦力矩的测量方法尚未有相关报道。因此,如何测量周期性摩擦力矩成为本领域技术人员亟待解决的技术问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种周期性摩擦力矩的测量方法、装置、计算机设备和存储介质。
2、第一方面,本申请提供了一种周期性摩擦力矩的测量方法。所述方法应用于谐波减速器,包括:
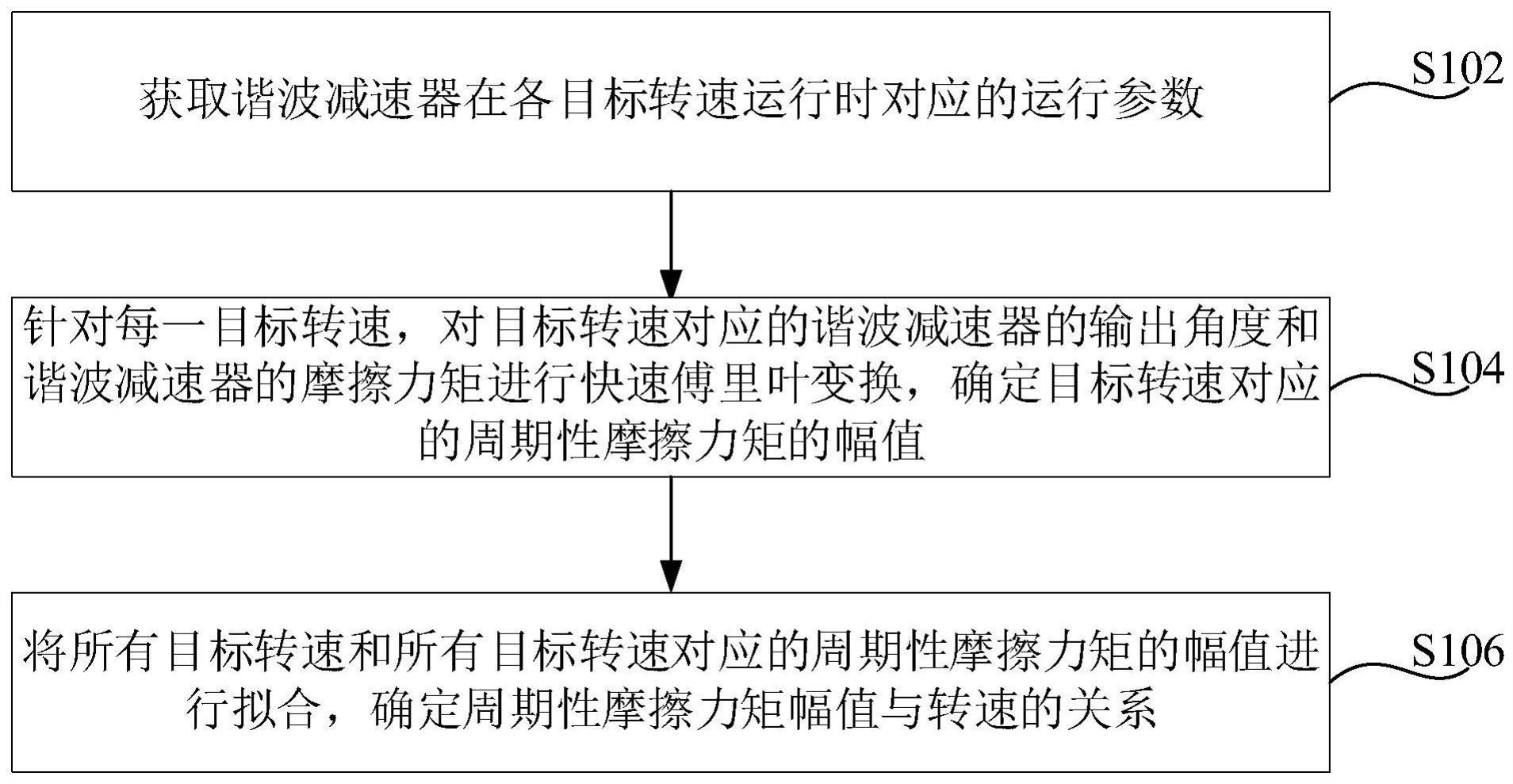
3、获取所述谐波减速器在各目标转速运行时对应的运行参数;其中,所述运行参数包括所述谐波减速器的输出角度和所述谐波减速器的摩擦力矩;
4、针对每一目标转速,对所述目标转速对应的谐波减速器的输出角度和谐波减速器的摩擦力矩进行快速傅里叶变换,确定所述目标转速对应的周期性摩擦力矩的幅值;
5、将所有目标转速和所有目标转速对应的周期性摩擦力矩的幅值进行拟合,确定周期性摩擦力矩幅值与转速的关系。
6、在其中一个实施例中,所述获取所述谐波减速器在各目标转速运行时对应的运行参数,包括:
7、通过电机控制所述谐波减速器在各目标转速下运行;
8、利用电流传感器采集所述谐波减速器在各目标转速运行时所述电机的电流;
9、根据所述电机的电流,计算所述电机的输出力矩;
10、将所述电机的输出力矩,确定为所述谐波减速器的摩擦力矩。
11、在其中一个实施例中,所述根据所述电机的电流,计算所述电机的输出力矩,包括:
12、获取所述电机的力矩系数;
13、根据所述电机的电流和所述电机的力矩系数,计算所述电机的输出力矩。
14、在其中一个实施例中,所述获取所述谐波减速器在各目标转速运行时对应的运行参数,还包括:
15、通过角度传感器采集所述谐波减速器在各目标转速运行时对应的谐波减速器的输出角度。
16、在其中一个实施例中,所述方法还包括:
17、获取所述谐波减速器的最大输入转速;
18、在0至所述最大输入转速的范围内插入多个转速点;
19、将所述多个转速点对应的转速,确定为所述目标转速。
20、在其中一个实施例中,所述转速点的个数为80至120中的任一值。
21、在其中一个实施例中,所述谐波减速器的输出端的转过角度大于4π。
22、第二方面,本申请提供了一种周期性摩擦力矩的测量装置。所述装置用于谐波减速器,包括:
23、参数获取模块,用于获取所述谐波减速器在各目标转速运行时对应的运行参数;其中,所述运行参数包括所述谐波减速器的输出角度和所述谐波减速器的摩擦力矩;
24、傅里叶变换模块,用于针对每一目标转速,对所述目标转速对应的谐波减速器的输出角度和谐波减速器的摩擦力矩进行快速傅里叶变换,确定所述目标转速对应的周期性摩擦力矩的幅值;
25、函数拟合模块,用于将所有目标转速和所有目标转速对应的周期性摩擦力矩的幅值进行拟合,确定周期性摩擦力矩幅值与转速的关系。
26、第三方面,本申请还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
27、获取所述谐波减速器在各目标转速运行时对应的运行参数;其中,所述运行参数包括所述谐波减速器的输出角度和所述谐波减速器的摩擦力矩;
28、针对每一目标转速,对所述目标转速对应的谐波减速器的输出角度和谐波减速器的摩擦力矩进行快速傅里叶变换,确定所述目标转速对应的周期性摩擦力矩的幅值;
29、将所有目标转速和所有目标转速对应的周期性摩擦力矩的幅值进行拟合,确定周期性摩擦力矩幅值与转速的关系。
30、第四方面,本申请还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
31、获取所述谐波减速器在各目标转速运行时对应的运行参数;其中,所述运行参数包括所述谐波减速器的输出角度和所述谐波减速器的摩擦力矩;
32、针对每一目标转速,对所述目标转速对应的谐波减速器的输出角度和谐波减速器的摩擦力矩进行快速傅里叶变换,确定所述目标转速对应的周期性摩擦力矩的幅值;
33、将所有目标转速和所有目标转速对应的周期性摩擦力矩的幅值进行拟合,确定周期性摩擦力矩幅值与转速的关系。
34、第五方面,本申请还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
35、获取所述谐波减速器在各目标转速运行时对应的运行参数;其中,所述运行参数包括所述谐波减速器的输出角度和所述谐波减速器的摩擦力矩;
36、针对每一目标转速,对所述目标转速对应的谐波减速器的输出角度和谐波减速器的摩擦力矩进行快速傅里叶变换,确定所述目标转速对应的周期性摩擦力矩的幅值;
37、将所有目标转速和所有目标转速对应的周期性摩擦力矩的幅值进行拟合,确定周期性摩擦力矩幅值与转速的关系。
38、上述周期性摩擦力矩的测量方法、装置、计算机设备、计算机可读存储介质和计算机程序产品,利用谐波减速器的输出角度和摩擦力矩进行快速傅里叶变换,获得谐波减速器在不同特定转速下的周期性摩擦力矩的幅值。进而对这些数据进行函数拟合,即可获得谐波减速器的周期性摩擦力矩与转速之间的关系曲线。由此可见,本申请实现了对谐波减速器周期性摩擦力矩的测量。
技术特征:
1.一种周期性摩擦力矩的测量方法,其特征在于,所述方法应用于谐波减速器,包括:
2.根据权利要求1所述的方法,其特征在于,所述获取所述谐波减速器在各目标转速运行时对应的运行参数,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述电机的电流,计算所述电机的输出力矩,包括:
4.根据权利要求2或3所述的方法,其特征在于,所述获取所述谐波减速器在各目标转速运行时对应的运行参数,还包括:
5.根据权利要求1-3任一所述的方法,其特征在于,所述方法还包括:
6.根据权利要求5所述的方法,其特征在于,所述转速点的个数为80至120中的任一值。
7.根据权利要求1-3任一所述的方法,其特征在于,所述谐波减速器的输出端的转过角度大于4π。
8.一种周期性摩擦力矩的测量装置,其特征在于,所述装置用于谐波减速器,包括:
9.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述的方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的方法的步骤。
技术总结
本申请提供了一种周期性摩擦力矩的测量方法、装置、计算机设备和存储介质。其中,该方法包括:获取谐波减速器在各目标转速运行时对应的运行参数;其中,运行参数包括谐波减速器的输出角度和谐波减速器的摩擦力矩;针对每一目标转速,对目标转速对应的谐波减速器的输出角度和谐波减速器的摩擦力矩进行快速傅里叶变换,确定目标转速对应的周期性摩擦力矩的幅值;将所有目标转速和所有目标转速对应的周期性摩擦力矩的幅值进行拟合,确定周期性摩擦力矩幅值与转速的关系。由此可见,本方法实现了对谐波减速器的周期性摩擦力矩的测量。
技术研发人员:张猛,熊宇聪,唐艺伟,肖曦,高卫青,刘兰英,祝晓丽,梁骄雁,郭超勇,佟雷
受保护的技术使用者:清华大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!