一种未爆弹探测定位系统及其应用方法
本发明涉及未爆弹探测定位领域,具体涉及一种未爆弹探测定位系统及其应用方法。
背景技术:
1、战场上的未爆弹药是威胁战后清理人员危险的突出问题之一,同时也对众多地区的重建和土地再利用带来了巨大的危险和不便。如何运用无人技术,并且准确无误的定位出未爆弹的位置,辅助战后清理人员完成清理战场的工作,成为当今战后清理工作的突出问题。如今未爆弹探测领域研究方向以水下未爆弹处理为主,开展了一系列磁法、声呐法等探测方法。虽然水下未爆弹的研究已经比较成熟,但在地面上尤其是山区、农村等区域的未爆弹探测研究还有待发展,并且对比于水下未爆弹,隐藏在陆地上的未爆弹危险性更大。随着无人技术的快速发展,基于无人平台的未爆弹探测凸显出重要优势。比如基于无人机的未爆弹探测系统,可以有效提升探测的效率和安全性。由于磁异信号随着距离的增长衰减较大,采用无人机探测未爆弹存在信号微弱、对磁传感器性能要求高等问题。而无人车可实现未爆弹更近的距离,磁异信号更明显。
技术实现思路
1、本发明要解决的技术问题:针对现有技术的上述问题,提供一种未爆弹探测定位系统及其应用方法,本发明能够用于通过磁传感器阵列探测磁异常变化并进行相对定位,确定未爆弹与无人履带车平台的相对位置,且采用无人系统搭载探测,避免了未爆弹探测对人员及设备的潜在危害,大大提升了未爆弹探测的效率和安全性。
2、为了解决上述技术问题,本发明采用的技术方案为:
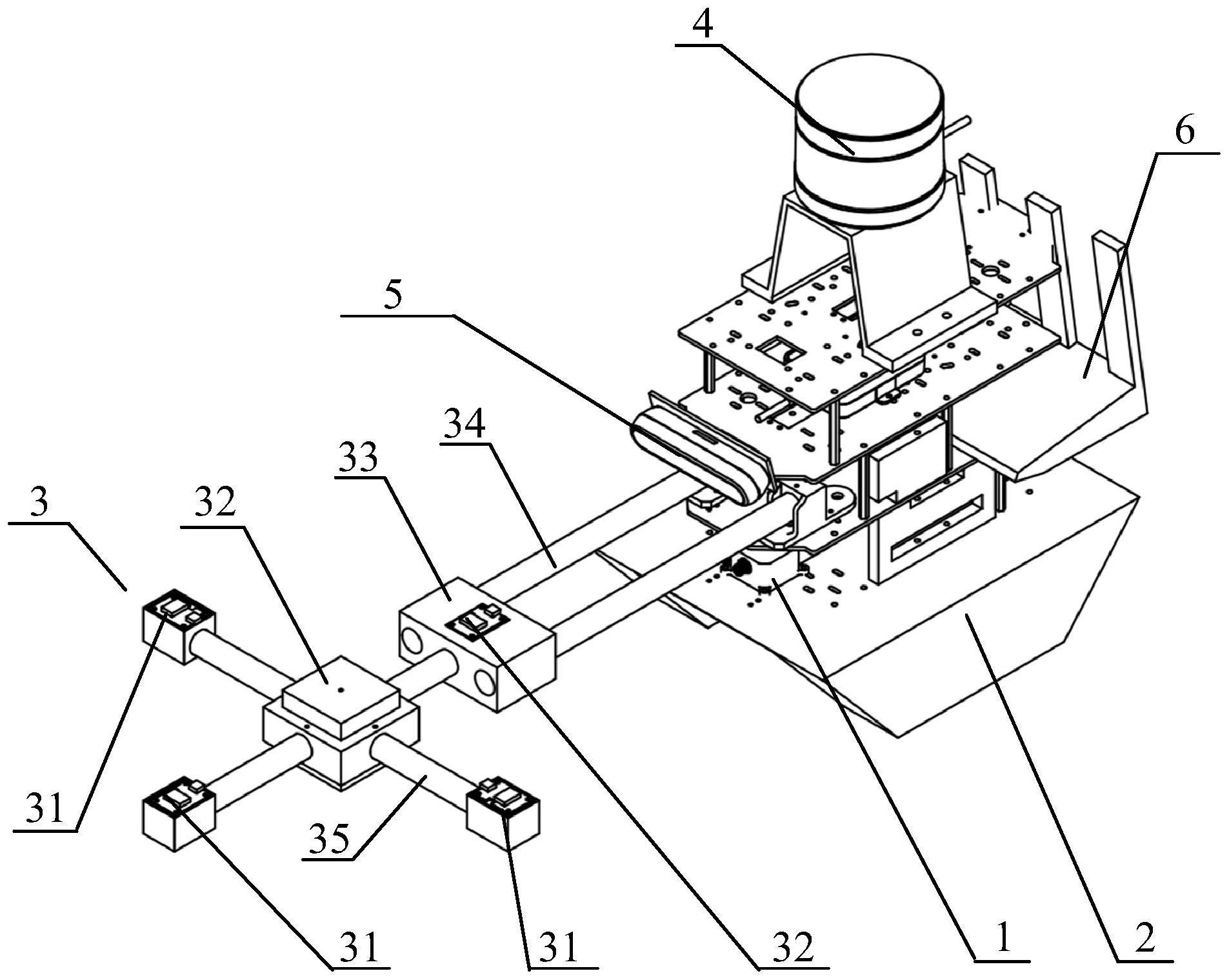
3、一种未爆弹探测定位系统,包括带有卫星定位模块的无人履带车平台,所述无人履带车平台上设有磁传感器阵列,所述磁传感器阵列包括呈十字交叉分布的四个磁传感器,所述无人履带车平台上还分别设有雷达模块、相机模块和无线通信及控制模块,所述卫星定位模块、无人履带车平台、磁传感器、雷达模块、相机模块分别与无线通信及控制模块相连。
4、可选地,所述磁传感器阵列包括安装座和连接座,所述安装座通过支撑梁与无人履带车平台相连,所述连接座的四周各连接有一根水平布置的连接梁,其中一根连接梁和连接座相连、其余三根连接梁末端安装有一个磁传感器,所述安装座中安装有一个磁传感器。
5、可选地,所述安装座通过两根沿水平方向布置的支撑梁与无人履带车平台相连。
6、可选地,所述无人履带车平台中还包括用于检测无人履带车平台的速度、位置和姿态信息的惯性制导模块,所述惯性制导模块与无线通信及控制模块相连。
7、可选地,所述雷达模块为激光雷达。
8、可选地,所述相机模块为深度相机。
9、本发明还提供一种前述未爆弹探测定位系统的应用方法,包括:
10、s101,分别获取四个磁传感器的xyz磁场方向分量的测量值;
11、s102,将测量值代入下式的函数表达式得到磁传感器阵列原点处的磁梯度张量;
12、
13、上式中,g为磁传感器阵列原点处的磁梯度张量,b1x~b4x分别为第1~4个磁传感器的x磁场方向分量的测量值,b1y~b4y分别为第1~4个磁传感器的y磁场方向分量的测量值,b1z~b4z分别为第1~4个磁传感器的z磁场方向分量的测量值,其中第1、3个磁传感器对称布置,第2、4个磁传感器对称布置,d为第1、3个磁传感器之间的距离,且第2、4个磁传感器之间的距离等于d;
14、s103,未爆弹位置的磁梯度张量g和未爆弹位置的磁场大小计算未爆弹的位置矢量。
15、可选地,步骤s103中计算未爆弹的位置矢量的函数表达式为:
16、
17、上式中,r表示未爆弹的位置矢量,g为磁传感器阵列原点处的磁梯度张量,b为未爆弹位置的磁场大小,z为z磁场方向的深度,且有:
18、b=(3μ0(m·r0)r0-μ0m)/(4πr3),
19、上式中,μ0为真空磁导率,m为未爆弹的磁矩,r0=r/r为沿未爆弹的位置方向的单位矢量,r为未爆弹的位置矢量,r为未爆弹的位置的大小。
20、可选地,步骤s103之后,还包括利用激光雷达、深度相机和惯性制导模块进行slam建图,并根据未爆弹的位置矢量在slam建图得到的slam地图中标记出未爆弹的位置。
21、可选地,步骤s103之后,还包括利用卫星定位模块获取无人履带车平台的经纬度,并根据未爆弹的位置矢量和无人履带车平台的经纬度计算出未爆弹的经纬度坐标。
22、和现有技术相比,本发明主要具有下述优点:
23、1、本发明的未爆弹探测定位系统包括带有卫星定位模块的无人履带车平台,所述无人履带车平台上设有磁传感器阵列,无人履带车平台上还分别设有雷达模块、相机模块和无线通信及控制模块,卫星定位模块、无人履带车平台、磁传感器、雷达模块、相机模块分别与无线通信及控制模块相连,当有未爆弹存在时,可通过磁传感器阵列探测磁异常变化并进行相对定位,确定未爆弹与无人履带车平台的相对位置,且采用无人系统搭载探测,避免了未爆弹探测对人员及设备的潜在危害,大大提升了未爆弹探测的效率和安全性。
24、2、本发明的未爆弹探测定位系统的磁传感器阵列包括呈十字交叉分布的四个磁传感器,利用呈十字交叉分布的四个磁传感器,可有效提升未爆弹的探测概率和定位精度。
技术特征:
1.一种未爆弹探测定位系统,其特征在于,包括带有卫星定位模块(1)的无人履带车平台(2),所述无人履带车平台(2)上设有磁传感器阵列(3),所述磁传感器阵列(3)包括呈十字交叉分布的四个磁传感器(31),所述无人履带车平台(2)上还分别设有雷达模块(4)、相机模块(5)和无线通信及控制模块(6),所述卫星定位模块(1)、无人履带车平台(2)、磁传感器(31)、雷达模块(4)、相机模块(5)分别与无线通信及控制模块(6)相连。
2.根据权利要求1所述的未爆弹探测定位系统,其特征在于,所述磁传感器阵列(3)包括安装座(32)和连接座(33),所述安装座(32)通过支撑梁(34)与无人履带车平台(2)相连,所述连接座(33)的四周各连接有一根水平布置的连接梁(35),其中一根连接梁(35)和连接座(33)相连、其余三根连接梁(35)末端安装有一个磁传感器(31),所述安装座(32)中安装有一个磁传感器(31)。
3.根据权利要求2所述的未爆弹探测定位系统,其特征在于,所述安装座(32)通过两根沿水平方向布置的支撑梁(34)与无人履带车平台(2)相连。
4.根据权利要求3所述的未爆弹探测定位系统,其特征在于,所述无人履带车平台(2)中还包括用于检测无人履带车平台(2)的速度、位置和姿态信息的惯性制导模块,所述惯性制导模块与无线通信及控制模块(6)相连。
5.根据权利要求4所述的未爆弹探测定位系统,其特征在于,所述雷达模块(4)为激光雷达。
6.根据权利要求5所述的未爆弹探测定位系统,其特征在于,所述相机模块(5)为深度相机。
7.一种权利要求1~6中任意一项所述的未爆弹探测定位系统的应用方法,其特征在于,包括:
8.根据权利要求7所述的未爆弹探测定位系统的应用方法,其特征在于,步骤s103中计算未爆弹的位置矢量的函数表达式为:
9.根据权利要求8所述的未爆弹探测定位系统的应用方法,其特征在于,步骤s103之后,还包括利用激光雷达、深度相机和惯性制导模块进行slam建图,并根据未爆弹的位置矢量在slam建图得到的slam地图中标记出未爆弹的位置。
10.根据权利要求9所述的未爆弹探测定位系统的应用方法,其特征在于,步骤s103之后,还包括利用卫星定位模块(1)获取无人履带车平台(2)的经纬度,并根据未爆弹的位置矢量和无人履带车平台(2)的经纬度计算出未爆弹的经纬度坐标。
技术总结
本发明公开了一种未爆弹探测定位系统及其应用方法,本发明的未爆弹探测定位系统,包括带有卫星定位模块的无人履带车平台,无人履带车平台上设有磁传感器阵列,磁传感器阵列包括呈十字交叉分布的四个磁传感器,无人履带车平台上还分别设有雷达模块、相机模块和无线通信及控制模块,卫星定位模块、无人履带车平台、磁传感器、雷达模块、相机模块分别与无线通信及控制模块相连。本发明能够用于通过磁传感器阵列探测磁异常变化并进行相对定位,确定未爆弹与无人履带车平台的相对位置,且采用无人系统搭载探测,避免了未爆弹探测对人员及设备的潜在危害,大大提升了未爆弹探测的效率和安全性。
技术研发人员:杜青法,谢菲,周子钰,王伟,李如璟,宋晔,郭子慕
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!