场景理解系统和方法与流程
背景技术:
1、当自主车辆(av)接近动态对象(如动子)时,av使用动态对象的预测轨迹来修改其自身的轨迹。应为动态对象检测静态障碍物,并使用静态障碍物来预测动态对象的轨迹。例如,一个或多个可能的轨迹可以使动态对象避开或转向绕过检测到的障碍物。av包括多个传感器和算法,以便于对象检测、场景理解、对象轨迹预测和车辆轨迹生成。传统av的场景理解相当初级,这限制了对象轨迹预测和车辆轨迹生成的能力。
技术实现思路
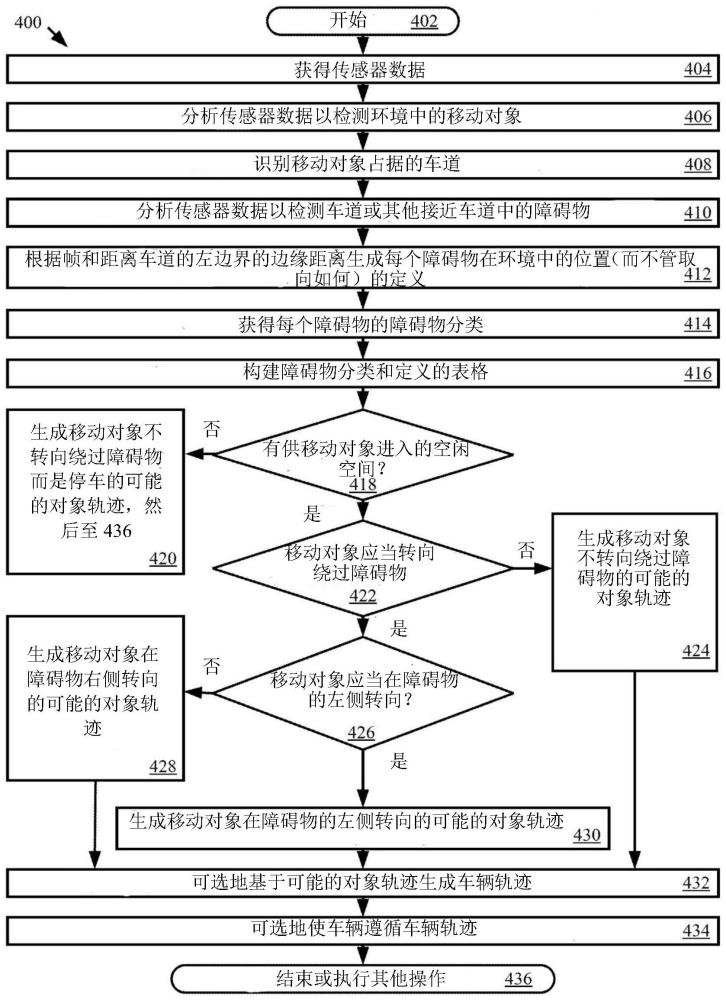
1、本公开涉及用于生成可能的对象轨迹和/或操作车辆的实现系统和方法。方法包括:由处理器分析传感器数据以检测环境中的移动对象和移动对象无法穿过的至少一个障碍物;由处理器根据为车道定义的参考帧和距离车道的边界(例如,左边界)的边缘距离来生成障碍物在环境中的位置的定义;由处理器使用定义来检测移动对象何时应当转向绕过障碍物或何时不应当转向绕过障碍物;以及由处理器基于对象何时应当转向绕过障碍物或何时不应当转向绕过障碍物的检测来生成可能的对象轨迹。
2、本公开还包括用于生成可能的对象轨迹的实现系统和方法。方法包括:由处理器分析传感器数据以检测环境中的移动对象和移动对象无法穿过的至少一个障碍物;由处理器根据为车道定义的参考帧以及从车道的边界(例如,左边界)到障碍物边缘的距离来生成障碍物在环境中的位置的定义;由处理器使用障碍物的位置的定义和移动对象的已知尺寸来检测移动对象可以穿过的障碍物周围的任何空闲空间;以及由处理器基于对任何空闲空间的检测来生成可能的对象轨迹。
3、实现系统可以包括:处理器;以及包括编程指令的非暂时性计算机可读存储介质,编程指令被配置为使处理器实现用于生成可能的对象轨迹和/或操作车辆的方法。上述方法还可以由计算机程序产品来实现,该计算机程序产品包括存储器和被配置为使处理器执行操作的编程指令。
技术特征:
1.一种用于生成可能的对象轨迹的方法,包括:
2.根据权利要求1所述的方法,还包括由所述处理器执行操作以基于所述可能的对象轨迹来控制车辆。
3.根据权利要求1所述的方法,其中,每个所述参考帧相对于垂直于距离轴延伸的帧轴定义在所述车道中的位置,所述距离轴从所述车道的所述第一边界延伸到所述车道的第二边界。
4.根据权利要求1所述的方法,还包括通过识别与所述障碍物相交的至少一个第一参考帧和离所述障碍物最近但不与所述障碍物相交的至少一个第二参考帧来生成所述定义。
5.根据权利要求4所述的方法,其中,生成所述定义还包括:
6.根据权利要求4所述的方法,其中,生成所述定义还包括:
7.根据权利要求4所述的方法,其中,生成所述定义还包括:
8.根据权利要求1所述的方法,其中生成所述定义包括使用2d矩形,所述2d矩形包围所述障碍物和所述环境中的至少一个其他障碍物,所述障碍物和至少一个其他障碍物就参考帧而言顺序排列,与两个相同的连续参考帧相关联,并且就距离所述第一边界的距离而言是重叠的。
9.根据权利要求1所述的方法,还包括使用距离轴来获得所述边缘距离,所述距离轴的原点与所述车道的所述第一边界对齐,并且当所述车道的所述第一边界弯曲或拐弯时,所述距离轴的原点在所述距离轴上的位置可变。
10.根据权利要求1所述的方法,其中,除了所述定义之外,所述处理器还使用所述障碍物的分类来检测所述移动对象何时应当转向绕过所述障碍物或何时不应当转向绕过所述障碍物。
11.根据权利要求1所述的方法,其中,当所述移动对象的至少一部分和所述障碍物的至少一部分距离所述车道的所述第一边界的距离相同时,检测到所述移动对象应当转向绕过所述障碍物。
12.根据权利要求1所述的方法,其中,当从所述车道的所述第一边界到所述移动对象离所述第一边界最远的一侧的距离与从所述车道的所述第一边界到所述障碍物离所所述第一边界最近的一侧的距离之差小于阈值时,检测到所述移动对象应当转向绕过所述障碍物。
13.根据权利要求1所述的方法,还包括构建通过所述车道的标识符索引所述障碍物的所述定义和分类的表格。
14.根据权利要求1所述的方法,还包括使用所述定义来获得所述移动对象的转向方向。
15.根据权利要求14所述的方法,其中,当所述障碍物的右边缘比所述障碍物的左边缘离所述移动对象更近时,所述转向方向为右,而当所述障碍物的所述左边缘比所述障碍物的所述右边缘离所述移动对象更近时,所述转向方向为左。
16.根据权利要求14所述的方法,其中,当所述障碍物的左边缘和右边缘距离所述移动对象等距并且所述移动对象位于所述车道的左侧时,所述转向方向为右,并且当所述障碍物的所述左边缘和所述右边缘距离所述移动对象等距并且所所述移动对象位于所述车道的右侧时,所述转向方向为左。
17.根据权利要求14所述的方法,还包括识别所述障碍物周围所述移动对象能够穿过的空闲空间。
18.根据权利要求17所述的方法,还包括基于识别出的所述空闲空间来改变所述转向方向。
19.一种系统,包括:
20.一种存储指令的非暂时性计算机可读介质,所述指令被配置为当由至少一个计算设备执行时,使所述至少一个计算设备执行以下操作:
技术总结
本文公开了用于生成可能的对象轨迹的系统、方法和计算机程序产品实施例。例如,方法包括:分析传感器数据以检测环境中的移动对象和移动对象无法穿过的至少一个障碍物;根据为车道定义的参考帧和距车道边界的边缘距离来生成障碍物在环境中的位置的定义;使用定义来检测移动对象何时应当转向绕过障碍物或何时不应当转向绕过障碍物;以及基于对象何时应当转向绕过障碍物或何时不应当转向绕过障碍物的检测来生成可能的对象轨迹。
技术研发人员:皮埃特罗·布兰迪齐,洛伦佐·纳尔迪,法兰肯·托罗克
受保护的技术使用者:福特全球技术公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!