霍尔型轮速传感器信号分离式解析电路及解析方法与流程
本发明实施例涉及轮速解析,尤其涉及一种霍尔型轮速传感器信号分离式解析电路及解析方法。
背景技术:
1、轮速传感器是用来测量汽车车轮转速的传感器。对于现代汽车而言,轮速信息是必不可少的,汽车动态控制系统(vdc)、汽车电子稳定程序(esp)、防抱死制动系统(abs)、自动变速器的控制系统等都需要轮速信息,所以轮速传感器是现代汽车中最为关键的传感器之一。
2、目前市面上主要的霍尔轮速传感器信号解析方案为集成专用芯片实现,将四路轮速信号集成到一个专用芯片中,且目前能提供轮速解析的集成专用芯片数量极少,品牌也屈指可数,这给控制器开发工作带来了很大的局限性,为突破该现状,开发了一种轮速传感器信号解析的分离电路方案。
技术实现思路
1、本发明实施例提供一种霍尔型轮速传感器信号分离式解析电路及方法,能够对每个轮速传感器均通过一个独立的信号分离式解析电路进行解析。
2、本发明实施例第一方面提供了一种霍尔型轮速传感器信号分离式解析电路,包括:
3、包括:i/v转换电路、第一比较器电路以及第二比较器电路;
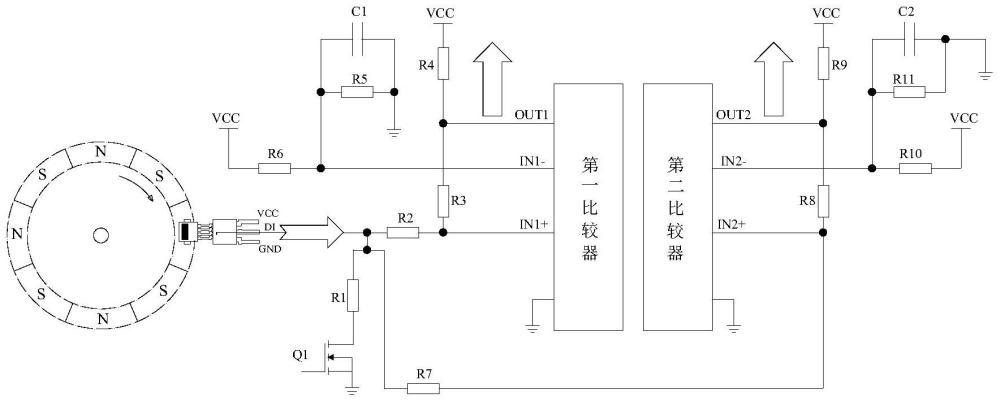
4、其中,所述i/v转换电路连接至所述霍尔型轮速传感器的信号输出端,所述第一比较器电路和第二比较器电路的第一输入端分别通过第一电阻和第二电阻连接至所述霍尔型轮速传感器的信号输出端,第一比较器电路和第二比较器电路的第二输入端分别连接至第一基准电压电路和第二基准电压电路,第一比较器电路和第二比较器电路的输出端分别连接至处理器的第一输入端和第二输入端。
5、采用比较器电路和i/v转换电路构建的信号分离式解析电路,可以对每个轮速传感器的输出信号进行解析,从而得到相应的轮速,相比于采用专用芯片,其元器件的选配更加灵活,一方面可以降低成本、可靠性高,另一方面还可以实现四路轮速传感器信号的解析独立工作,互不干扰,抗干扰能力强。
6、作为一种可选的实施方式,在本发明实施例第一方面中,所述i/v转换电路包括电阻r1,所述电阻r1的一端连接至霍尔型轮速传感器的信号输出端,所述电阻r1的另一端接地。
7、i/v转换电路通过电阻实现,该电阻将流经其电流信号通过欧姆定律的换算转换成电压信号,使得霍尔型轮速传感器的输出电流转换成与该电阻阻值相关的输出电压,电阻的阻值根据需要进行设定,其也关系到后续在对低边的故障诊断中。在其他的实施例中,i/v转换电路还可以通过其他方式实现,例如可以通过运算放大电路实现,或者采用i/v转换芯片,例如rcv420等实现。
8、作为一种可选的实施方式,在本发明实施例第一方面中,所述分离式解析电路还包括控制开关,所述控制开关为nmos管q1,所述nmos管q1的栅极连接至所述处理器的输出端,所述nmos管的源极接地,所述nmos管q1的漏极连接至所述电阻r1的另一端。
9、控制开关可以控制该霍尔型轮速传感器信号分离式解析电路的运行与否,当处理器的输出端输出高电平时,nmos管q1导通,i/v转换电路工作,霍尔型轮速传感器信号分离式解析电路得以运行,而当处理器的输出端输出低电平时,nmos管q1关断,霍尔型轮速传感器信号分离式解析电路无法运行。
10、作为一种实施方式,可以在霍尔型轮速传感器需要工作前,先由处理器对霍尔型轮速传感器的电源和接地端进行状态诊断,当状态均正常时,打开nmos管q1。在霍尔型轮速传感器工作时,例如可以每间隔10ms对霍尔型轮速传感器的电源和接地端进行状态诊断,当状态有任何异常,关断nmos管q1。
11、作为一种可选的实施方式,在本发明实施例第一方面中,所述第一比较器电路包括第一比较器,所述第一比较器的正相输入端通过第一电阻连接至所述电阻r1和霍尔型轮速传感器的信号输出端之间,所述第一比较器的反相输入端通过电阻r6连接至第一基准电压源,所述第一比较器的输出端连接至所述处理器的第一输入端;
12、所述第二比较器电路包括第二比较器,所述第二比较器的正相输入端通过第二电阻连接至所述电阻r1和霍尔型轮速传感器的信号输出端之间,所述第二比较器的反相输入端通过电阻r10连接至第二基准电压源,所述第二比较器的输出端连接至所述处理器的第二输入端。
13、第一比较器电路和第二比较器电路均可以通过相应的比较器实现,在本发明较佳的实施例中,第一比较器和第二比较器的正相输入端均连接到霍尔型轮速传感器的信号输出端,而第一比较器和第二比较器的反相输入端分别连接到第一基准电压源和第二基准电压源,从而在霍尔型轮速传感器输出的电压大于第一基准电压源(或第二基准电压源)的参考电压时,第一比较器(或第二比较器)输出高电平,以此,可以将霍尔型轮速传感器的输出信号转换成脉冲信号,结合车轮的齿数和直径,则可以得到对应的轮速。在其他的实施例中,也可以将基准电压源与霍尔型轮速传感器输出信号的位置进行对调。
14、作为一种可选的实施方式,在本发明实施例第一方面中,所述分离式解析电路还包括第一滤波电路和第二滤波电路,所述第一滤波电路包括电阻r5和电容c1,所述电阻r5和电容c1并联后的一端连接至所述电阻r6和第一比较器的反相输入端之间,所述电阻r5和电容c1并联后的另一端接地;所述第二滤波电路包括电阻r11和电容c2,所述电阻r11和电容c2并联后的一端连接至所述电阻r10和第二比较器的反相输入端之间,所述电阻r11和电容c2并联后的另一端接地。
15、为了避免第一基准电压源和第二基准电压源的参考电压因为脉冲干扰或者其他因素造成的不稳定,可以将第一基准电压源和第二基准电压源分别增设滤波电路。除上述采用rc滤波电路外,也可以采用单独的滤波电容实现,或者采用rl、rlc等滤波电路实现。
16、作为一种可选的实施方式,在本发明实施例第一方面中,所述处理器还具有第一采样端和第二采样端,所述第一采样端连接至所述霍尔型轮速传感器的电源输入端;所述第二采样端连接至所述霍尔型轮速传感器的接地端。
17、第一采样端和第二采样端分别用于对霍尔型轮速传感器高边故障和低边故障进行诊断,避免因高边或低边问题造成霍尔型轮速传感器信号分离式解析电路无法正常工作。
18、本发明实施例第二方面中采用本发明实施例第一方面的霍尔型轮速传感器信号分离式解析电路实现信号解析的方法,包括:
19、当所述霍尔型轮速传感器为两档电流型时,配置所述第一电阻的阻值以及第一基准电压电路的参考电压,以在所述霍尔型轮速传感器输出电流为第一电流时,所述第一比较器电路的输出端输出低电平;在所述霍尔型轮速传感器输出电流为第二电流时,所述第一比较器电路的输出端输出高电平;
20、当所述霍尔型轮速传感器为三档电流型时,配置所述第一电阻、第二电阻的阻值以及第一基准电压电路和第二基准电压电路的参考电压,以在所述霍尔型轮速传感器输出电流为第一电流时,所述第一比较器电路和第二比较器电路的输出端均输出低电平;在所述霍尔型轮速传感器输出电流为第二电流时,所述第一比较器电路的输出端输出高电平,所述第二比较器电路的输出端输出低电平;在所述霍尔型轮速传感器输出电流为第三电流时,所述第一比较器电路的输出端输出高电平,所述第二比较器电路的输出端输出高电平;
21、所述第二电流大于第一电流且小于第三电流;
22、基于处理器的第一输入端和第二输入端获取的脉冲信号对所述霍尔型轮速传感器信号输出端的输出信号进行解析,得到所述霍尔型轮速传感器的轮速信息。
23、本发明实施例基于基准电压与霍尔型轮速传感器的输出信号通过第一比较器电路和第二比较器进行比对,进而转换成第一比较器电路和第二比较器电路的输出脉冲信号,基于该脉冲信号,可以得到霍尔型轮速传感器的轮速信息,采用比较器电路和i/v转换电路构建的信号分离式解析电路,可以对每个轮速传感器的输出信号进行解析,从而得到相应的轮速,相比于采用专用芯片,其元器件的选配更加灵活,一方面可以降低成本、可靠性高,另一方面还可以实现四路轮速传感器信号的解析独立工作,互不干扰,抗干扰能力强。
24、作为一种可选的实施方式,在本发明实施例第二方面中,所述第一比较器电路包括第一比较器,所述第一比较器电路的第一输入端和第二输入端分别为所述第一比较器的正相输入端和反相输入端;所述第二比较器电路包括第二比较器,所述第二比较器电路的第一输入端和第二输入端分别为所述第二比较器的正相输入端和反相输入端;
25、当所述霍尔型轮速传感器为两档电流型时,配置所述第一电阻的阻值以及第一基准电压电路的参考电压,以在所述霍尔型轮速传感器输出电流为第一电流时,所述第一比较器电路的第一输入端的输入电压小于第一比较器电路的第二输入端的输入电压;在所述霍尔型轮速传感器输出电流为第二电流时,所述第一比较器电路的第一输入端的输入电压大于第一比较器电路的第二输入端的输入电压;
26、当所述霍尔型轮速传感器为三档电流型时,配置所述第一电阻、第二电阻的阻值以及第一基准电压电路和第二基准电压电路的参考电压,以在所述霍尔型轮速传感器输出电流为第一电流时,所述第一比较器电路的第一输入端的输入电压小于第一比较器电路的第二输入端的输入电压,所述第二比较器电路的第一输入端的输入电压小于第二比较器电路的第二输入端的输入电压;在所述霍尔型轮速传感器输出电流为第二电流时,所述第一比较器电路的第一输入端的输入电压大于第一比较器电路的第二输入端的输入电压,所述第二比较器电路的第一输入端的输入电压小于第二比较器电路的第二输入端的输入电压;在所述霍尔型轮速传感器输出电流为第三电流时,所述第一比较器电路的第一输入端的输入电压大于第一比较器电路的第二输入端的输入电压,所述第二比较器电路的第一输入端的输入电压大于第二比较器电路的第二输入端的输入电压。
27、第一比较器电路和第二比较器电路均可以通过相应的比较器实现,作为一种实现方式,第一比较器和第二比较器的正相输入端均连接到霍尔型轮速传感器的信号输出端,而第一比较器和第二比较器的反相输入端分别连接到第一基准电压源和第二基准电压源,从而在霍尔型轮速传感器输出的电压大于第一基准电压源(或第二基准电压源)的参考电压时,第一比较器(或第二比较器)输出高电平,以此,可以将霍尔型轮速传感器的输出信号转换成脉冲信号,结合车轮的齿数和直径,则可以得到对应的轮速。在其他的实施例中,也可以将基准电压源与霍尔型轮速传感器输出信号的位置进行对调。
28、作为一种可选的实施方式,在本发明实施例第二方面中,基于处理器的第一输入端和第二输入端获取的脉冲信号对所述霍尔型轮速传感器信号输出端的输出信号进行解析,得到所述霍尔型轮速传感器的轮速信息,包括:
29、针对两档电流型霍尔型轮速传感器,根据所述处理器的第一输入端获取的脉冲信号确定霍尔型轮速传感器转过的齿数,结合所述车轮的直径以及每个激励信号的周期,确定所述霍尔型轮速传感器的轮速信息;
30、针对三档电流型霍尔型轮速传感器,根据所述处理器的第二输入端获取的脉冲信号确定霍尔型轮速传感器转过的齿数,结合所述车轮的直径以及每个激励信号的周期,确定所述霍尔型轮速传感器的轮速信息。
31、对于两档和三档电流型霍尔型轮速传感器,均可以通过周期法进行轮速计算,根据脉冲信号可以确定霍尔型轮速传感器转过的齿数,在结合车轮的直径以及每个脉冲信号的周期,确定所述霍尔型轮速传感器的轮速信息:
32、
33、其中,v为霍尔型轮速传感器的轮速值,d为车轮的直径,t为脉冲信号的周期,n为霍尔型轮速传感器转过的齿数。
34、作为一种可选的实施方式,在本发明实施例第二方面中,所述处理器还具有第一采样端和第二采样端,所述第一采样端连接至所述霍尔型轮速传感器的电源输入端;所述第二采样端连接至所述霍尔型轮速传感器的接地端;
35、如果所述第一采样端采集的电压信号大于第一预设电压值,或者小于第二预设电压值,则发出供电电压异常信号,所述第一预设电压值和第二预设电压值分别为所述霍尔型轮速传感器的供电电压的最大值和最小值;霍尔型轮速传感器供电正常情况下,第一采样端采样反馈轮速供电电压vcc,当第一采样端采集的电压信号大于vccmax(霍尔型轮速传感器的供电电压的最大值,可以是设定值)或者小于vccmin(霍尔型轮速传感器的供电电压的最小值,可以是设定值)时,发出供电电压异常信号的提醒。
36、如果所述第一采样端采集的电压信号小于第三预设电压值,则发出霍尔型轮速传感器高边短地信号以及供电电压异常信号;第三预设电压值可以为稍微大于0的电压值,例如可以是0.5v,如果第一采样端采集的电压信号小于该0.5v,则发出霍尔型轮速传感器高边短地信号的提醒,又由于第三预设电压值小于第二预设电压值,此时,还会发出供电电压异常信号的提醒。
37、如果所述第二采样端采集的电压信号小于第四预设阈值,则发出霍尔型轮速传感器低边短地信号或低边者开路信号。正常工作情况下,第二采样端的采样电压在low-levelsupply current所产生的最小电压值以上。发生霍尔型轮速传感器低边短地或者开路时,第二采样端的采样电压接近于0电压;因此可以设定第二采样端采集的电压信号小于第四预设阈值例如0.1v时,发出霍尔型轮速传感器低边短地信号或低边者开路信号的提醒。
38、如果所述第二采样端采集的电压信号大于满值电压时,则发出霍尔型轮速传感器低边短电源或高低边互短,所述满值电压为霍尔型轮速传感器输出最大电流时对应的电压值。正常工作情况下,第二采样端的采样电压在high-level supply current所产生的电压值以下。发生轮速传感器低边短电源或高低边互短时,第二采样端的采样电压为满值,当采样电压大于high-level supply current所产生的电压值(称为满值电压,其与high-levelsupply current以及电阻r1的阻值有关系)时,报出轮速传感器低边短电源或高低边互短。
39、与现有技术相比,本发明实施例的有益效果在于:
40、1、本发明实施例利用比较器的工作原理,实现4路轮速传感器信号解析独立工作,互不干扰,抗干扰能力强。
41、2、本发明实施例还给出完整的诊断策略,为车辆制动系统提供安全保障。
42、3、本发明实施例结构设计简单,电路实现成本低,可靠性高,本发明满足功能安全要求。
- 还没有人留言评论。精彩留言会获得点赞!