一种激光探测传感器及其控制方法与流程
本发明涉及高精度探测,尤其涉及一种激光探测传感器及其控制方法。
背景技术:
1、目前,激光探测传感器主要利用激光二极管发出的激光光束照射到被测物体表面,未被被测物体表面遮挡的激光光束投射到感光元件矩阵上。根据感光元件矩阵上的感光图像计算被测物体的形状。
2、本技术中由于待测物体的实际形状由感光图像确定,因此测量精度极大地受感光图像质量的影响。但因为激光为相干光源,故不可避免地带来激光散斑效应,即相干光照射被测物体时,不同的面元对入射相干光的反射或散射会引起不同的光程差,反射或散射的光波动在空间相遇时会发生干涉现象,会在被测物体表面形成随机、不规则的光强分布的斑点。激光散斑效应会造成感光图像的变形,进而影响激光探测传感器的测量精度。
技术实现思路
1、本发明提供了一种激光探测传感器及其控制方法,以解决激光散斑效应造成激光探测传感器测量精度低的问题。
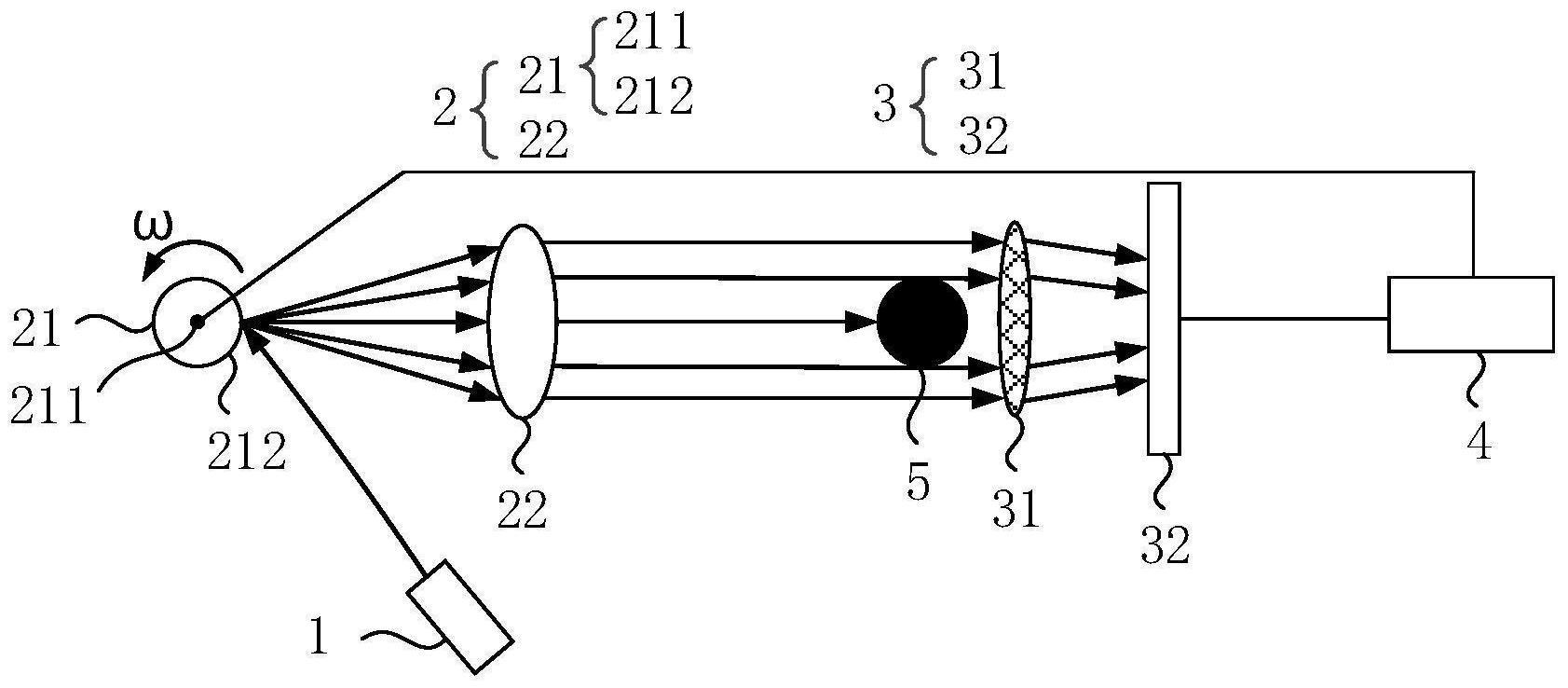
2、根据本发明的一方面,提供了一种激光探测传感器,其中包括:
3、激光光源、光路调整模块、感光成像模块和控制模块;
4、激光光源用于出射激光光束;
5、光路调整模块包括可旋转反射结构和远心光学组件;可旋转反射结构位于激光光束的传播路径上且与控制模块通信连接,用于根据控制模块输出的控制信号进行旋转以对激光光束进行调制;
6、远心光学组件设置在可旋转反射结构和待测物体之间的光路中,用于将经过可旋转反射结构反射的激光光束调整为平行激光光束;
7、感光成像模块设置在平行激光光束的传播路径上,用于接收未经待测物体遮挡的平行激光光束并根据平行激光光束得到待测物体的边缘感光图像;
8、控制模块与感光成像模块连接,用于根据边缘感光图像的光斑确定待测物体的形状。
9、可选的,远心光学组件包括至少一枚具备光焦度的透镜。
10、可选的,可旋转反射结构包括转动驱动组件和可旋转反射体;
11、转动驱动组件分别与控制模块和可旋转反射体通信连接,用于根据控制模块的控制信号控制可旋转反射体旋转。
12、可选的,可旋转反射体包括圆柱反射体或者n面柱形反射体,n≥6且n为整数;
13、圆柱反射体以及n面柱形反射体可绕可旋转反射体的中心旋转。
14、可选的,转动驱动组件包括微机电系统或者机械马达。
15、可选的,可旋转反射结构的反射面包括多个反光粒子或者多个微透镜。
16、可选的,感光成像模块包括成像透镜和感光元件;成像透镜和感光元件依次位于经待测物体后的平行激光光束的传播路径上;
17、成像透镜用于接收未经待测物体遮挡的平行激光光束并投射平行激光光束至感光元件上;
18、感光元件用于接收平行激光光束,并根据平行激光光束得到待测物体的边缘感光图像。
19、可选的,控制模块包括驱动电路和信息处理器;
20、驱动电路与可旋转反射结构通信连接,用于向可旋转反射结构输出控制信号以控制可旋转反射结构旋转;
21、信息处理器与感光元件通信连接,用于根据边缘感光图像的确定待测物体的形状。
22、根据本发明的另一方面,提供了一种激光探测传感器的控制方法,该控制方法用于控制激光探测传感器,控制方法包括:
23、输出控制信号控制可旋转反射结构旋转以切换不同的反射面,利用反射面对激光光束进行调制,以使经过调制的激光光束经远心光学组件再次调制后形成平行激光光束;
24、获取未经待测物体遮挡的平行激光光束在感光元件中的边缘感光图像;
25、根据边缘感光图像确定待测物体的形状。
26、可选的,根据边缘感光图像确定待测物体的形状,包括:
27、根据单帧或者多帧边缘感光图像确定待测物体的形状。
28、本发明的技术方案,通过在激光探测传感器中设置可旋转反射结构和远心光学组件,在感光成像模块的曝光时间内,利用可旋转反射结构的反射面连续反射激光光束并依次经过远心光学组件和待测物体在感光成像模块上形成边缘感光图像,在图像的曝光时间内,不同时刻平行激光光束照射在感光成像模块的光斑散斑特性不同且随机,实现散斑颗粒的平滑,实现探测激光的匀光处理,基于光斑散斑特性不同且随机的光斑获取的多个边缘感光图像经过叠加处理可以消除或者抑制散斑影响,进而可以得到散斑抑制后的待测物体边缘轮廓,提高了激光探测传感器的探测精度。
29、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种激光探测传感器,其特征在于,包括:
2.根据权利要求1所述的激光探测传感器,其特征在于,所述远心光学组件包括至少一枚具备光焦度的透镜。
3.根据权利要求1所述的激光探测传感器,其特征在于,所述可旋转反射结构包括转动驱动组件和可旋转反射体;
4.根据权利要求3所述的激光探测传感器,其特征在于,所述可旋转反射体包括圆柱反射体或者n面柱形反射体,n≥6且n为整数;
5.根据权利要求3所述的激光探测传感器,其特征在于,所述转动驱动组件包括微机电系统或者机械马达。
6.根据权利要求1所述的激光探测传感器,其特征在于,所述可旋转反射结构的反射面包括多个反光粒子或者多个微透镜。
7.根据权利要求1所述的激光探测传感器,其特征在于,所述感光成像模块包括成像透镜和感光元件;所述成像透镜和所述感光元件依次位于经所述待测物体后的所述平行激光光束的传播路径上;
8.根据权利要求7所述的激光探测传感器,其特征在于,所述控制模块包括驱动电路和信息处理器;
9.一种激光探测传感器的控制方法,其特征在于,用于控制权利要求1-8任一项所述的激光探测传感器,所述控制方法包括:
10.根据权利要求9所述的控制方法,其特征在于,根据所述边缘感光图像确定所述待测物体的形状,包括:
技术总结
本发明公开了一种激光探测传感器及其控制方法。其中,激光探测传感器包括:激光光源、光路调整模块、感光成像模块和控制模块;激光光源用于出射激光光束;光路调整模块包括可旋转反射结构和远心光学组件;可旋转反射结构用于根据控制模块输出的控制信号进行旋转以对激光光束进行调制;远心光学组件用于将经过可旋转反射结构反射的激光光束调整为平行激光光束。本发明的技术方案,利用可旋转反射结构的反射面连续反射激光光束并依次经过远心光学组件和待测物体在感光成像模块上形成边缘感光图像,在曝光时间内,使得感光成像模块获取到的单帧或者多帧边缘感光图像的散斑得到抑制,提高了激光探测传感器的精度。
技术研发人员:王威,姚文政
受保护的技术使用者:光子(深圳)精密科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!