一种用于IMU阵列的低复杂度自校准方法
本发明属于校准惯性测量单元(inertial measurement unit,imu),具体地说是涉及一种用于imu阵列的低复杂度自校准方法。
背景技术:
1、惯性传感器是一种用于测量物体加速度、角速度和方向变化的设备。它们通常基于惯性力和旋转原理工作,可以在没有外部参考的情况下提供关于物体运动状态的信息。惯性传感器在许多领域中得到广泛应用,包括航空航天、汽车工程、消费电子、运动追踪等。由于三维空间中的刚体具有六个自由度、三个旋转自由度和三个平移自由度,因此通常使用包含三维陀螺仪和三维加速度计的惯性测量单元来测量物体的运动。如今,随着微机电系统(micro-electro-mechanical system,mems)技术的进步,微型加速度计、陀螺仪和磁力计的生产达到了前所未有的规模,同时价格也大幅降低。由于这些低成本的imu性能较差,无法在许多应用中实现可靠的定位效果。利用这些mems-imu的小尺寸、低价格和低功耗特性,可以构建由数十个甚至数百个imu组成的阵列,并将它们的测量数据融合起来,从而创造出性价比极高的“超级传感器”。
2、使用imu阵列的好处不仅是提高了测量精度,而且由于可以进行传感器故障检测和隔离,还提高了操作可靠性。由于imu阵列测量的不是波场,而是力场,基于关于旋转坐标系中的力的经典力学结果,可以制定用于imu阵列测量的信号模型。因此,必须准确了解imu之间的空间几何位姿,imu的几何位姿不确定性可能会影响测量结果的融合。文献“h.carlsson,i.skog and j.jaldén,"on-the-fly geometric calibration of inertialsensor arrays,"2017international conference on indoor positioning and indoornavigation(ipin),sapporo,japan,2017,pp.1-6,doi:10.1109/ipin.2017.8115879”中仅解决了一种不确定性问题,即当imu阵列中的所有imu坐标系相同时,由于传感器安装误差和对传感器芯片内部传感元件物理位置不清楚而引起的问题,但是其依然存在复杂imu阵列中imu几何位姿不确定性与测量数据融合困难的问题。
技术实现思路
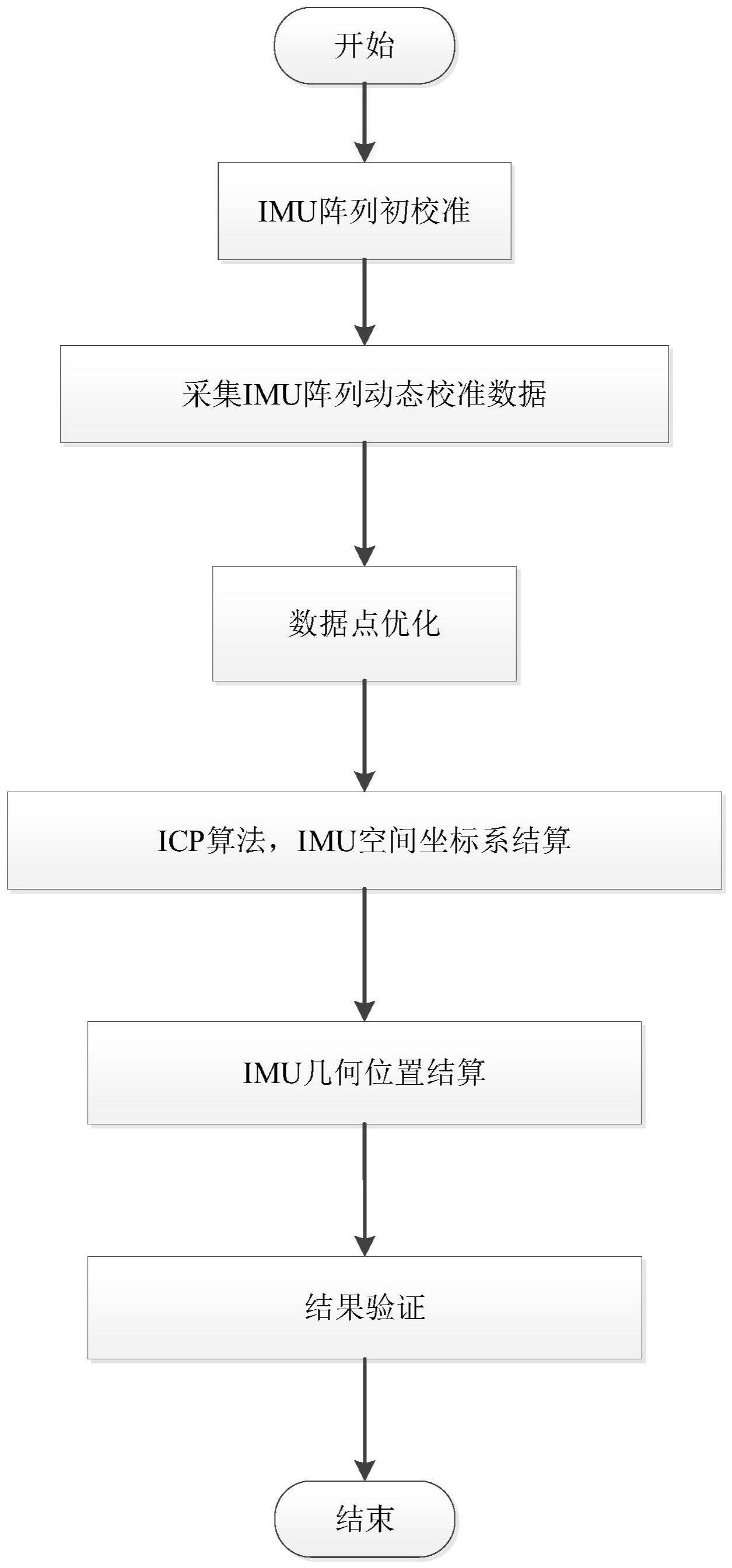
1、针对上述问题,本发明提出了一种imu阵列低复杂度的自校准方法。该方法利用迭代最近点(iterative closest point,icp)算法对imu阵列上的imu进行坐标系的对齐,得到各个imu的信息,继而建立信号模型利用最大似然估计求解出各个imu的几何距离。这一项创新有效地克服了传感器安装误差以及传感器芯片内部传感元件物理位置不明确所引发的数据融合困难的问题,进一步提升了复杂阵列的适用性和定位精度。
2、本发明的技术方案是:
3、一种用于imu阵列的低复杂度自校准方法,包括以下步骤:
4、s1、根据实际需求设计imu阵列,确定imu的布设方式以及使用的imu数量,根据初始位置对imu进行编号,获得各imu的初始相对位置信息序列;
5、s2、采用如下误差模型对静态参数进行补偿:
6、
7、其中,和分别表示imu输出的加速度和角速度矢量,s和ω分别表示对应的真实值;ba和bg分别表示加速度计和陀螺仪的零偏误差,na和ng分别表示加速度计和陀螺仪的高斯噪声;
8、s3、采集imu阵列动态数据,具体为通过无规则动态旋转和移动,得到全部n个imu的动态数据,定义第n个帧的第k个imu输出的加速度和角加速度分别为和得到每一个imu的输出数据为ak:
9、
10、将每个imu的加速度数值与角加速度数值记录得到数据集a:
11、a=[a1 a2 … an]
12、s4、imu几何位姿解算,具体为:
13、从数据集a中选择出陀螺仪量程10%到90%之间的数据作为解算数据,利用icp算法求解出imu阵列中各imu的姿态,即求解出各个imu之间坐标系的旋转矩阵r,将其统一于地球坐标系上,具体为将陀螺仪输出的数据视为三维点云数据,通过点云配准方式进行解算,定义点云配准问题为:
14、
15、其中,ps为源点云,指需要校正坐标系的陀螺仪输出值。pt为目标点云,指地球坐标系下的陀螺仪输出值。|ps|指在运动时段内采集的陀螺仪输出数据的总数量。为目标点云中第n点值,指地球坐标系下的第n帧陀螺仪输出值。为源点云中第n点值,指需要校正坐标系的第n帧陀螺仪输出值。r和t分别是坐标系间的旋转矩阵与陀螺仪输出数据的时间误差;和为r和t的最大似然估计值。
16、根据求解得到的最大似然估计值代替实际的旋转矩阵r,令继续使用最大似然估计值来求解出imu在阵列中各imu的相对位置r,具体为:
17、建立加速度计的信号模型为:
18、
19、其中,sk表示旋转坐标系中一点的比力,s为阵列坐标系原点o处的比力,ω为角速度,rk为点到坐标系原点o的距离,为角加速度,×为向量积;
20、引入ωa表示三维列向量a的斜对称矩阵表示,其中ωab=a×b,则将加速度计信号模型转化为:
21、
22、其中,sk=rk×sk w=rk×ωrk为第k个imu校正到地球坐标系下的旋转矩阵,其中sk表示imu阵列所测量的加速度信息,ω表示imu阵列所测量的角速度信息,而则表示对应的角加速度信息,表示三维列向量的斜对称矩阵表示;
23、将由物理量sk所组成的测量矢量ys建模为:
24、ys=hs(w)+hsφ+ns
25、其中,
26、
27、ns表示加速度计的测量误差。
28、建立陀螺仪信号模型为:
29、yω=hω(ω)+nω
30、其中nω表示陀螺仪的测量误差。
31、将所有测量值连接到单个向量中,整个阵列的信号模型变为:
32、y=h(ω)+hφ+n
33、其中,
34、
35、假设测量误差n为零均值,并且具有已知协方差矩阵q的高斯分布,则建立阵列信号模型的对数似然函数为:
36、
37、其中,
38、{w,φ}的最大似然估计量由下式给出:
39、
40、由于阵列信号模型是部分线性的,所以通过固定参数w并最大化线性参数φ的似然函数来集中对数似然函数,对于固定值的角速度w*,解由最小二乘法给出:
41、
42、其中,
43、计算得出φ的最小二乘解令从而得到了平移加速度s的相关信息;
44、将φ的估计值代回得到集中最大似然估计器:
45、
46、得到所需变量后,利用imu的初始相对位置信息序列,与来自各个时刻样本的数据,建立阵列信号模型,计算出平移加速度s的相关值,由最小二乘法解算出相对位置r(k):
47、
48、其中,其中表示第k个imu在n时刻的加速度的信息,s是各个时刻的平移加速度信息;每一次循环过后更新相对位置序列,直到其收敛为止,从而完成了imu阵列中各个imu相对位置的解算。
49、本发明的有益效果为,本发明的方法用于复杂惯性传感器阵列中各个imu的三维空间中的几何位姿,以便提升后续融合的效果,本发明利用惯性测量单元(imu)传感器阵列在任意运动下的测量值,无需专业的旋转平台,直接估计imu在阵列中的位置与姿态,不需要参考运动或外部设备,并且每次迭代的计算复杂度是线性的,这是一个重要的优势,能有效解决传感器安装误差以及传感器芯片内部传感元件物理位置未知的问题,从而提高了复杂阵列的适用性与定位精度。因此本发明的方法是一种能够良好适用于不同阵列类型的稳定校准方法。
- 还没有人留言评论。精彩留言会获得点赞!