基于改进蚁群算法的钢筋绑扎机器人路径规划方法及装置
本发明涉及机器人路径规划,具体为基于改进蚁群算法的钢筋绑扎机器人路径规划方法及装置。
背景技术:
1、随着城市化进程的不断推进,建筑和桥梁的需求也在不断增加,利用传统施工建造方法已经不能满足施工生产率、质量、安全性和可持续发展的要求,兼具自动化技术和机器人技术的智能建造机器人逐渐作为高效的理想劳动力被引入到各种施工场景中,其中钢筋绑扎机器人在提高工地钢筋绑扎作业的生产效率、绑扎规范性和施工安全性上具有很广阔的应用前景。
2、建筑机器人在应用到施工场景中时通常需要完成三个工作,路径识别、路径规划和行为决策,其中路径规划问题是建筑机器人自主作业的核心问题,它的目标是在含有静态、动态障碍物或者环境干扰的地图中寻找一条完成特定任务的无碰撞最优路径,授权公告号为“cn116151036b”的发明专利公开了一种钢筋自动绑扎的路径规划方法,该方法对于绑扎机器人扫描视野内的钢筋交叉点进行按序排列,并通过计算相邻点之间距离来判断是否反序编辑,最终实现遍历所有绑扎点的s形路径规划,此方法虽然对钢筋绑扎机器人作业范围内的绑扎点进行了遍历路径规划,但是没有对绑扎机器人在整片钢筋网上的行走路径进行规划,为此,我们提出基于改进蚁群算法的钢筋绑扎机器人路径规划方法及装置。
技术实现思路
1、本发明的目的在于提供一种基于改进蚁群算法的钢筋绑扎机器人路径规划方法及装置,能够填补目前建造机器人路径规划技术和方法上的空白,解决了绑扎机器人在钢筋网上避障和遍历路劲寻优问题。
2、为实现上述目的,本发明提供如下技术方案:基于改进蚁群算法的钢筋绑扎机器人路径规划方法,具体步骤包括:
3、s1.根据机器人作业范围将工作区域简化为若干任务点,根据栅格法建立电子地图,设置路径的起点、终点和障碍物信息;
4、s2.初始化蚁群算法基本参数,确定各相邻任务点之间初始信息素浓度,对于垂直于导轨钢筋方向上的相邻点的信息素浓度进行折减,将初始信息素浓度代入信息素更新模型中;
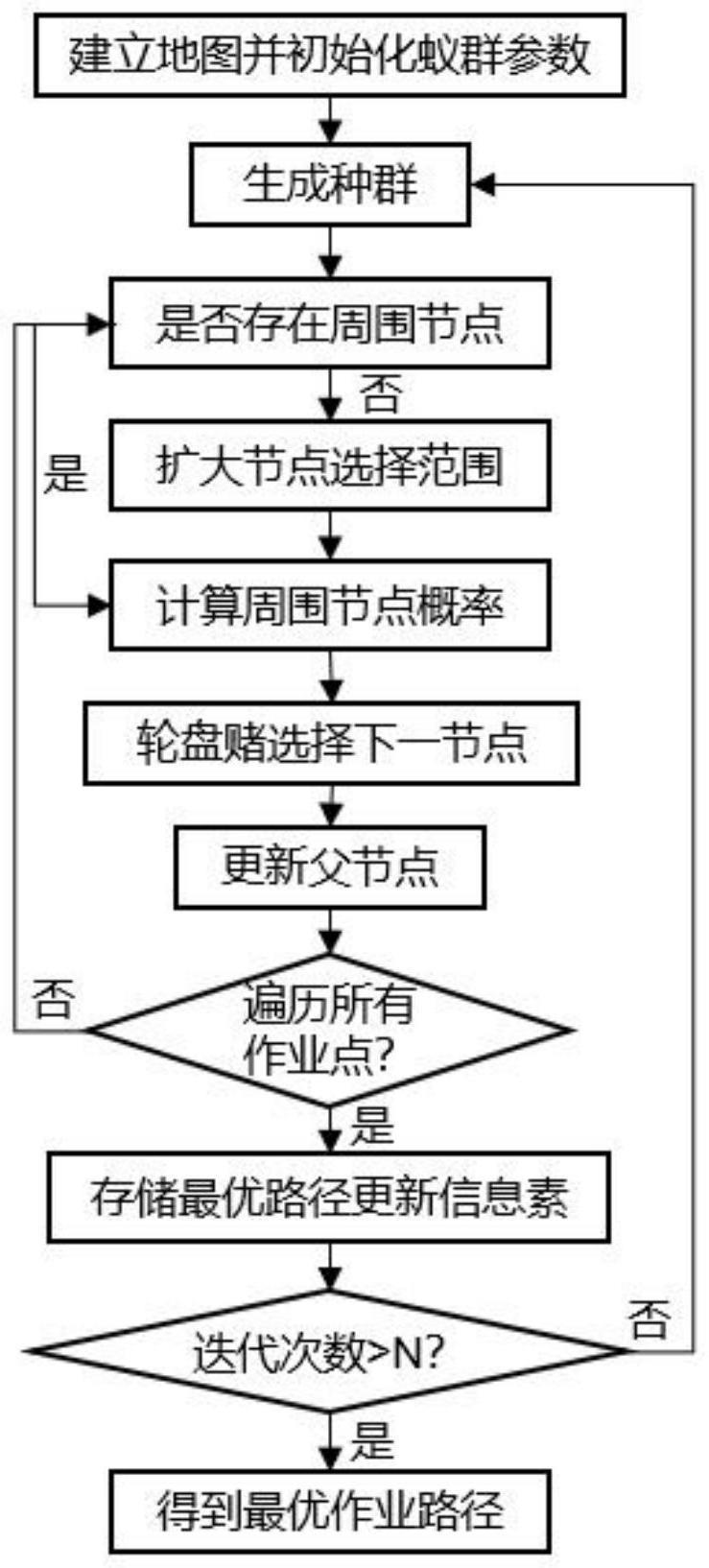
5、s3.生成蚂蚁种群,确定每次迭代的蚂蚁种群数量,确定初始作业点坐标;
6、s4.将每只蚂蚁放入电子地图中的起点处;
7、s5.判断蚂蚁当前所处节点四周是否存在未遍历节点,若存在,则利用综合启发函数,计算蚂蚁移向下一节点的概率,并利用轮盘赌法选择下一目标节点;若不存在则扩大选择节点的范围,直至出现未遍历节点;
8、s6.判断当前蚂蚁是否遍历所有节点,若是,则返回s4;若否,则将蚂蚁当前所处节点更新为s5中确定的下一目标节点,返回s5,继续进行作业节点遍历;
9、s7.当这一代所有蚂蚁均完成作业节点遍历之后,根据信息素更新模型,计算每一只蚂蚁遍历路径的路径长度、转弯次数的综合指标,得到本次迭代最优的路径,即路径长度最短的路径并记录下来,然后进行信息素更新;
10、s8.判断路径搜索迭代次数是否达到预设值,若是则执行下一步;若否,则返回至s2;
11、s9.计算并比较各代蚂蚁的最优遍历路径,挑选其中最优的路径作为本次整体搜索的最优路径,保存相关路径信息。
12、进一步的,所述信息素更新模型表达式为:
13、
14、
15、ck(t)=upk(t)+vhk(t);
16、式中,τij(t)表示t时刻作业点i到j的路径上信息素,ρ为信息素的蒸发率,τij为路径之前的信息素含量,为第k只蚂蚁在t时刻在路径(i,j)的信息素增量,q为信息素浓度,ck(t)为第t次迭代中第k只蚂蚁走过路径的信息素综合指标,指标越小,路径越优,留下的信息素越多,pk(t)为路径的长度,hk(t)为沿垂直于轨道钢筋方向移动的次数,u,v为两种因素的调节参数,可根据需要取适当值。
17、进一步的,所述s5中综合启发函数的表达式如下:
18、
19、式中,为综合启发函数,表示第k只蚂蚁从i节点转移到j节点的期望;di,j为i节点与j节点之间的距离;λ为距离系数,当i节点与j节点在同一个导轨钢筋方向上时,取1,不在同一个导轨钢筋方向上时,取大于1的值,根据需求取值。
20、进一步的,所述s5中蚂蚁移向下一个节点的转移概率公式为:
21、
22、式中,c为蚂蚁下一节点的可行域集合;τij(t)为路径(i,j)的信息素值;α为信息素启发式因子,它决定了信息素浓度对路径选择的影响程度;β为期望启发式因子,他决定了启发信息对路径选择的影响程度,τis(t)表示t时刻路径(i,s)的信息素值,s属于c里面的一个可选择的节点;ηi,s(t)为t时刻路径(i,s)的期望。
23、进一步的,所述根据机器人作业范围将作业区域钢筋网上的绑扎点用最少的圆形覆盖,将每个圆形的圆心作为机器人作业的任务点。
24、进一步的,所述采用切割的方式将不规则形状的障碍物形成的障碍区域转化为规则图形,结合任务点和障碍区域的分布,将作业环境转换为栅格地图。
25、进一步的,所述电子地图利用仿真软件进行建立,该仿真软件为matlabr2022b。
26、进一步的,所述s1中所述的相关参数为:蚂蚁数量m,最大迭代次数nmax、信息启发式因子α、期望启发式因子β、信息素挥发因子ρ、信息素浓度q、机器人的起始点坐标。
27、本发明提供一种基于改进蚁群算法的钢筋绑扎机器人路径规划装置,具体包括:
28、仿真编程模块,用于根据机器人作业范围将工作区域简化为若干任务点,根据栅格法建立电子地图,设置路径的起点、终点和障碍物信息;
29、初始化模块,用于初始化蚁群算法基本参数,确定各相邻任务点之间初始信息素浓度,对于垂直于导轨钢筋方向上的相邻点的信息素浓度进行折减,将初始信息素浓度代入信息素更新模型中;
30、初始点确定模块,用于生成蚂蚁种群,确定每次迭代的蚂蚁种群数量,确定初始作业点坐标;
31、起始迭代模块,用于将每只蚂蚁放入电子地图中的起点处;
32、第一判断模块,用于判断蚂蚁当前所处节点四周是否存在未遍历节点,若存在,则利用综合启发函数,计算蚂蚁移向下一节点的概率,并利用轮盘赌法选择下一目标节点;若不存在则扩大选择节点的范围,直至出现未遍历节点;
33、第二判断模块,用于判断当前蚂蚁是否遍历所有节点,若是,则返回s4;若否,则更新父节点,返回s5,继续进行作业节点遍历;
34、更新模块,用于当这一代所有蚂蚁均完成作业节点遍历之后,根据信息素更新模型,计算每一只蚂蚁遍历路径的路径长度、转弯次数的综合指标,得到本次迭代最优的路径进行信息素更新;
35、第三判断模块,用于判断路径搜索迭代次数是否达到预设值,若是则执行下一步;若否,则返回至s2;
36、计算模块,用于计算并比较各代蚂蚁的最优遍历路径,挑选其中最优的路径作为本次整体搜索的最优路径,保存相关路径信息。
37、关于本发明的一个方面,本发明提供一种终端设备,包括存储器、处理器及存储在存储器中并能够在处理器上运行的计算机程序,所述存储器中存储有能够在处理器上运行的计算机程序,所述处理器加载并执行计算机程序时,采用了所述的基于改进蚁群算法的钢筋绑扎机器人路径规划方法。
38、本发明至少具备以下有益效果:
39、本发明首先考虑机器人作业范围和障碍物将机器人作业的钢筋网环境转换为包含若干任务点的电子地图,其次针对导轨式机器人在钢筋网上的两种运行方式即沿着导轨钢筋行进和垂直于导轨钢筋顶升平移,对启发函数进行优化,提高两种行进方式的转移概率差值,减少顶升平移次数,并通过更改目标点选择范围来解决遍历时发生的死锁问题,可以得到一条遍历所有任务点的最高效率作业路径,填补了目前建造机器人路径规划技术和方法上的空白,解决了绑扎机器人在钢筋网上避障和遍历路劲寻优问题。
40、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
- 还没有人留言评论。精彩留言会获得点赞!